
全固态激光雷达视场角动态扩展方法、系统及存储介质.pdf

是你****盟主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

全固态激光雷达视场角动态扩展方法、系统及存储介质.pdf
本发明公开了全固态激光雷达视场角动态扩展方法、系统及存储介质,包括步骤:获取单个固态激光雷达测量的返回深度数据矩阵;通过计算单个固态激光雷达的返回深度数据矩阵得到相应的点云矩阵;获取三轴加速度姿态传感器测量运动后的姿态参数,并根据运动后姿态参数计算点云旋转矩阵;对所有固态激光雷达的点云矩阵与点云旋转矩阵进行点云数据融合处理,得到扩展后整体的固态激光雷达的最终深度数据矩阵及最终点云数据矩阵;对最终深度数据矩阵及最终点云数据矩阵进行点云数据渲染,得出扩展后整体的固态激光雷达的视场角数据。本发明实现了全固态激光

激光雷达视场的校正方法、计算机可读存储介质及激光雷达.pdf
本发明提供一种激光雷达视场的校正方法,所述激光雷达包括扫描装置,所述扫描装置用于在所述激光雷达视场进行扫描,所述校正方法包括:S11:根据点云,获取点云特征信息,所述点云特征信息包括参考物的轮廓、所述参考物的距离、所述参考物的反射率、所述参考物对应的点云中扫描线数量、所述参考物对应的点云的总点数中一项或多项;S12:根据所述点云特征信息,调节所述扫描装置的位姿,以校正所述激光雷达视场。本发明可以减小激光雷达的近距离盲区,并且能够避免由于视场偏移导致激光雷达无法正常探测的问题。本发明无需额外设置标靶或标定场

前端组件动态扩展的方法、系统及计算机可读存储介质.pdf
本发明属于软件技术开发领域,公开了一种前端组件动态扩展的方法及系统,该方法包括:打包编译组件的源代码并上传到组件库中存储;根据创建的页面从组件库选取相应的组件,并配置组件参数;对客户端站点发起的页面加载请求进行解析,以获取该页面加载所需的组件类型及组件源代码;同时,根据前端页面的布局,加载所需的组件到对应区域以呈现渲染内容。本发明提供的一种前端组件动态扩展的方法及系统,通过将前端组件进行独立打包开发,在项目中可实现灵活切换组件及扩展组件,针对在配置化的场景下,更加能提高大型单页面应用的加载性能,加速页面加
激光雷达APD保护方法、装置、存储介质及激光雷达系统.pdf
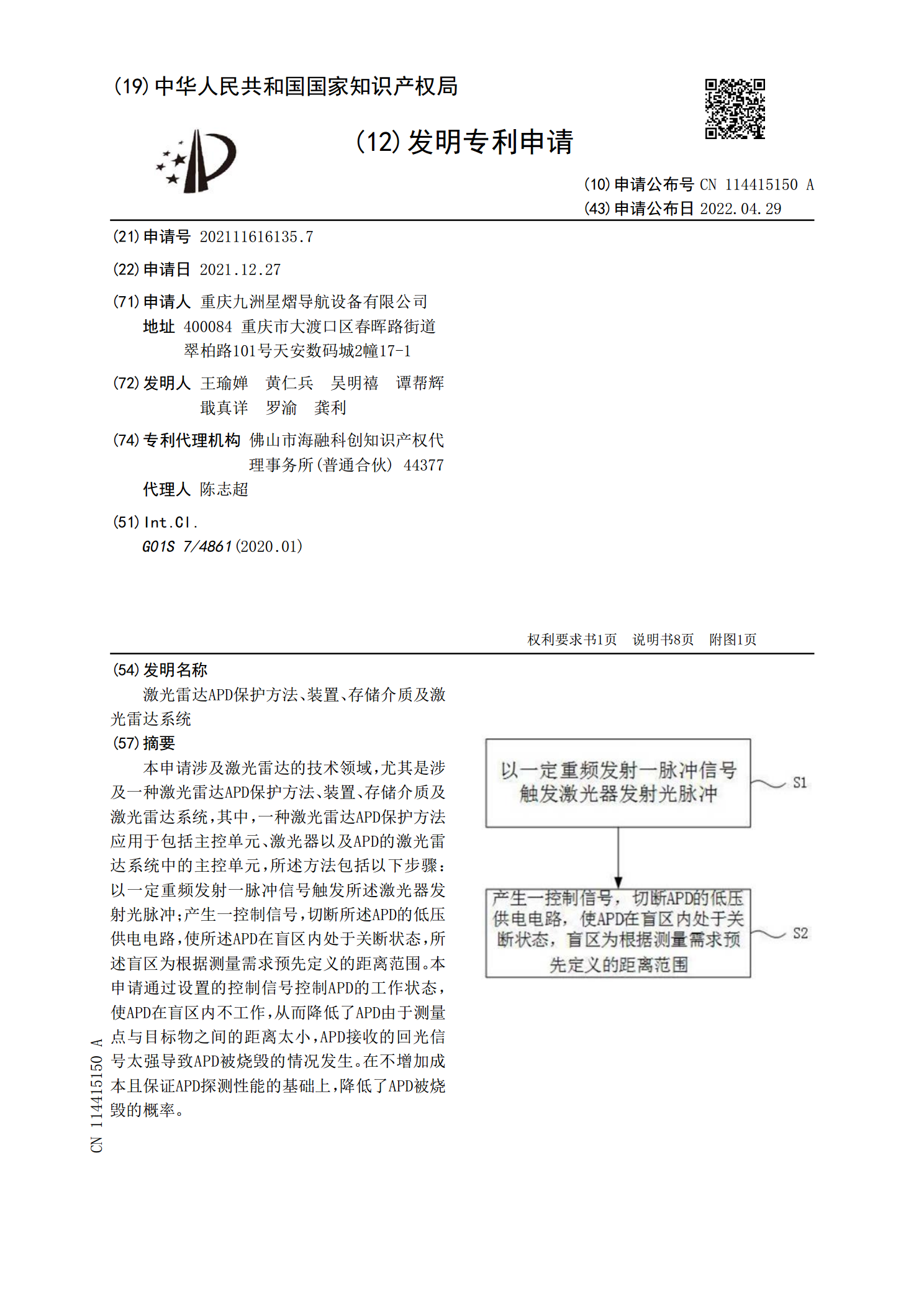
本申请涉及激光雷达的技术领域,尤其是涉及一种激光雷达APD保护方法、装置、存储介质及激光雷达系统,其中,一种激光雷达APD保护方法应用于包括主控单元、激光器以及APD的激光雷达系统中的主控单元,所述方法包括以下步骤:以一定重频发射一脉冲信号触发所述激光器发射光脉冲;产生一控制信号,切断所述APD的低压供电电路,使所述APD在盲区内处于关断状态,所述盲区为根据测量需求预先定义的距离范围。本申请通过设置的控制信号控制APD的工作状态,使APD在盲区内不工作,从而降低了APD由于测量点与目标物之间的距离太小,A

区块链系统的动态存储扩容方法、系统、设备及存储介质.pdf
本发明提供了一种区块链系统的动态存储扩容方法、电子设备及可读存储介质,其中动态扩容存储方法包括根据预先配置的第一配置文件,启动用于存储区块链数据的分布式文件存储系统;进而启动分布式存储插件,并判断区块链网络的节点是否需要启动分布式存储插件;在节点启动分布式存储插件的情况下,获取分布式文件存储系统的第二配置文件并由控制器根据第二配置文件初始化分布式文件接口,以实现区块链系统的扩容需求。本技术方案采用插件式架构,实现了基于分布式存储插件的动态存储扩容,用来存储区块链系统产生的大量区块数据,可以满足几乎任意数量