
一种自动寻路的盲人智能辅助装置及其方法.pdf

小忆****ng

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自动寻路的盲人智能辅助装置及其方法.pdf
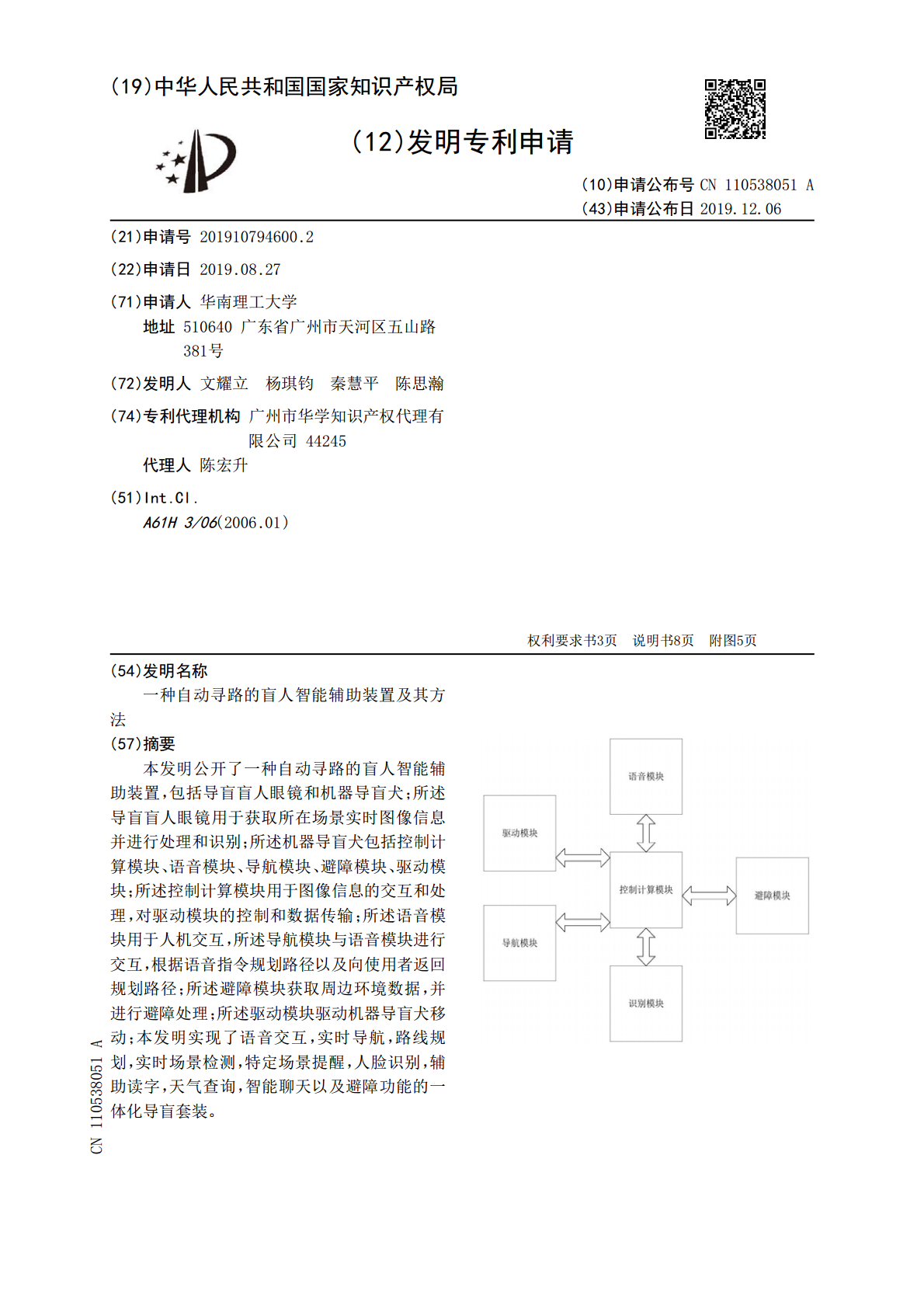
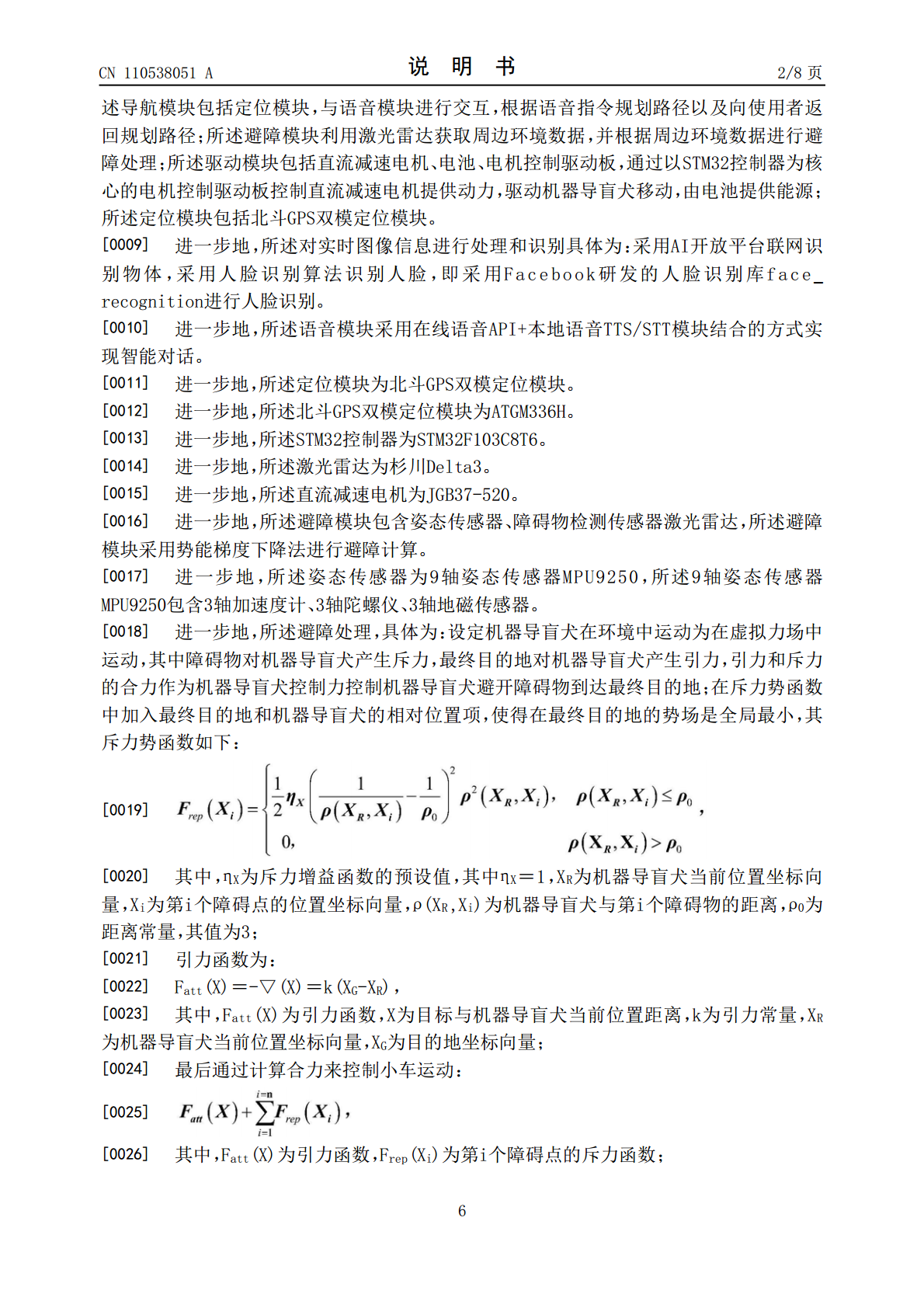
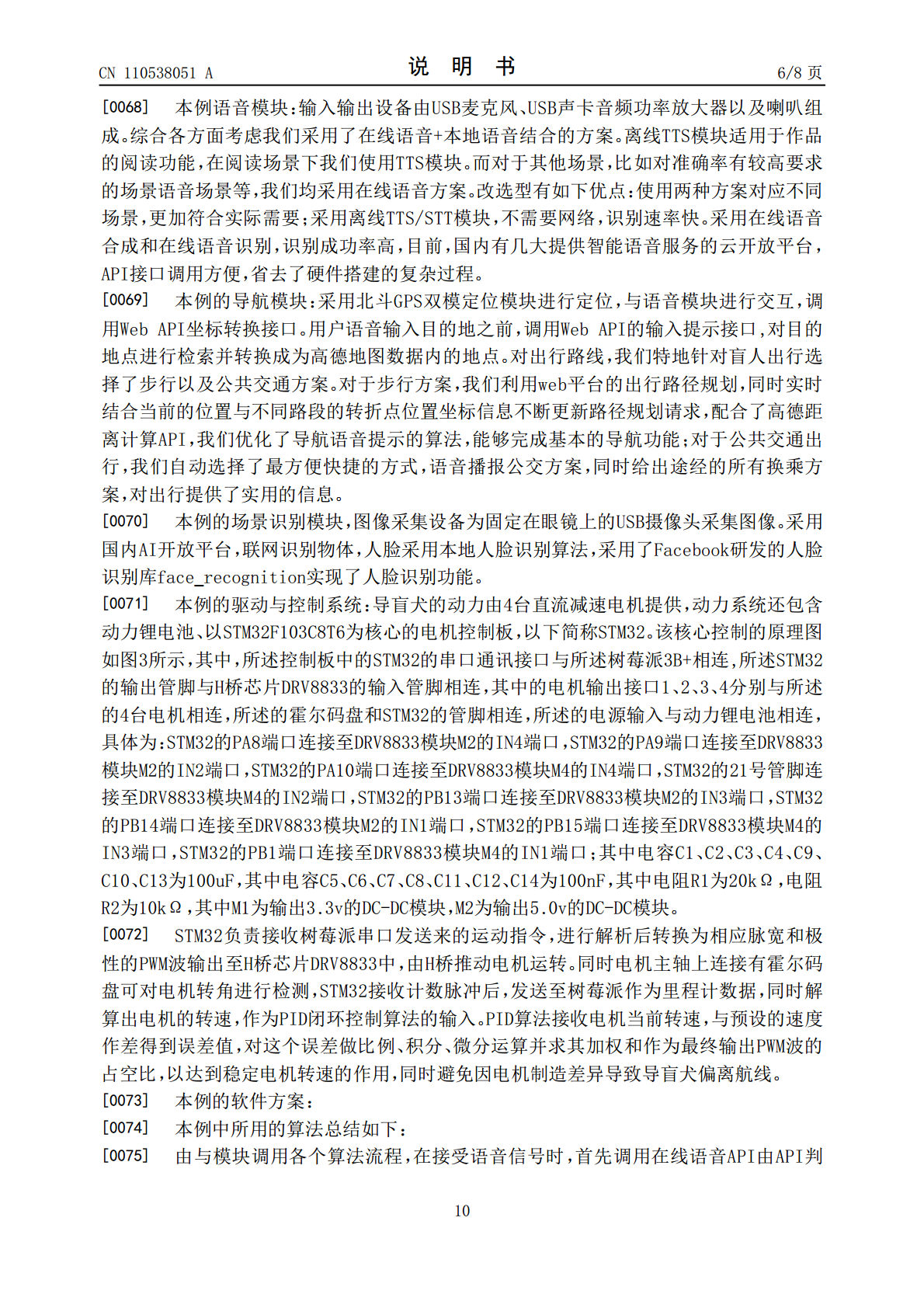
本发明公开了一种自动寻路的盲人智能辅助装置,包括导盲盲人眼镜和机器导盲犬;所述导盲盲人眼镜用于获取所在场景实时图像信息并进行处理和识别;所述机器导盲犬包括控制计算模块、语音模块、导航模块、避障模块、驱动模块;所述控制计算模块用于图像信息的交互和处理,对驱动模块的控制和数据传输;所述语音模块用于人机交互,所述导航模块与语音模块进行交互,根据语音指令规划路径以及向使用者返回规划路径;所述避障模块获取周边环境数据,并进行避障处理;所述驱动模块驱动机器导盲犬移动;本发明实现了语音交互,实时导航,路线规划,实时场景
一种智能盲人出行辅助装置及方法.pdf
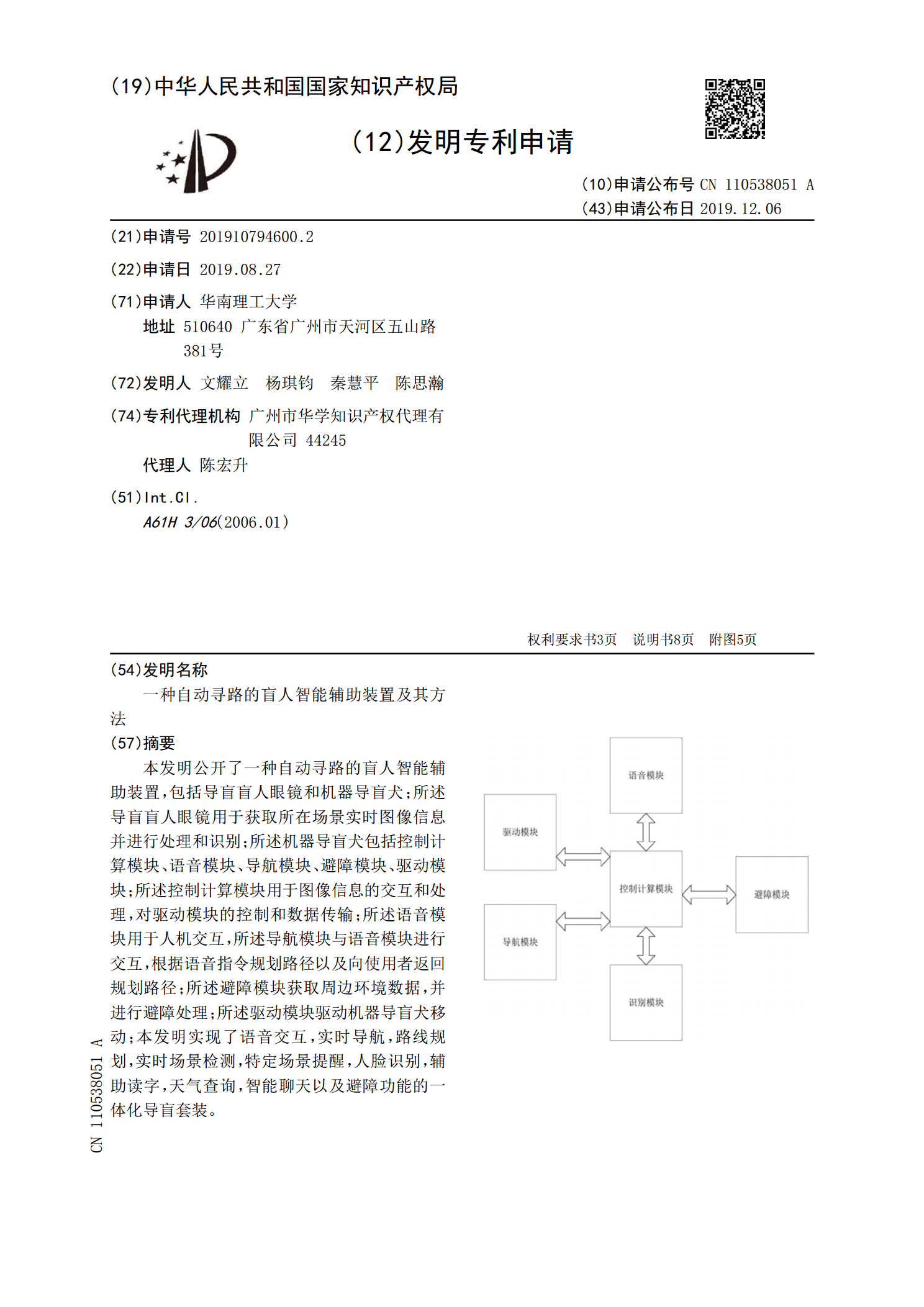
本发明公开了一种智能盲人出行辅助装置及方法,包括语音模块、识别模块、障碍检测模块、导航模块及信息处理模块;相较于现有的导盲系统,本发明提供了必要的导航信息和避障信息,其中障碍物检测模块不仅可以探测地面上较小的障碍物、悬空障碍物,还可以探测地面上较大的障碍物,同时能够预测障碍物的宽度信息,为盲人躲避障碍物提供精确数据同时;增加交通标志识别也能保证盲人出行更加安全。
一种用于盲人自动寻路的导航仪装置.pdf
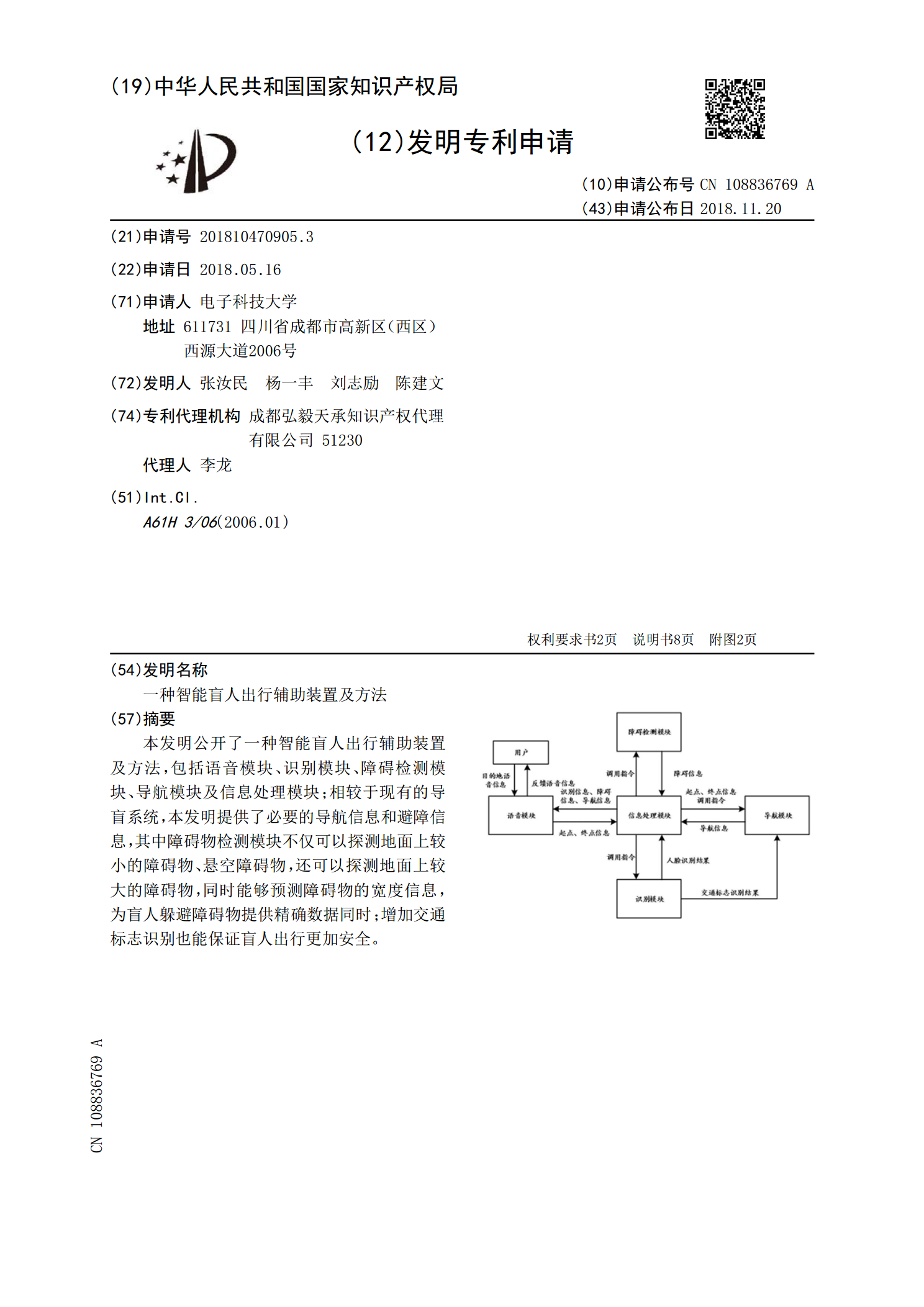
本发明公开了一种用于盲人自动寻路的导航仪装置,包括移动壳体,所述移动壳体下端面内设有开口朝下的传动腔,所述传动腔左右端壁之间固定安装设有沿所述传动腔中心线前后对称的固定块,所述固定块远离所述传动腔中心线一侧的端面内设有开口朝远离所述传动腔中心线一侧的开口导轨槽,本发明能让盲人更方便的出门,同时保证了出行的安全,并且能为他人更明显的知晓以便进行一定程度的帮助,能让盲人自己一个的情况下安全的出入离家较近的一些外界场所比如公园等地点。
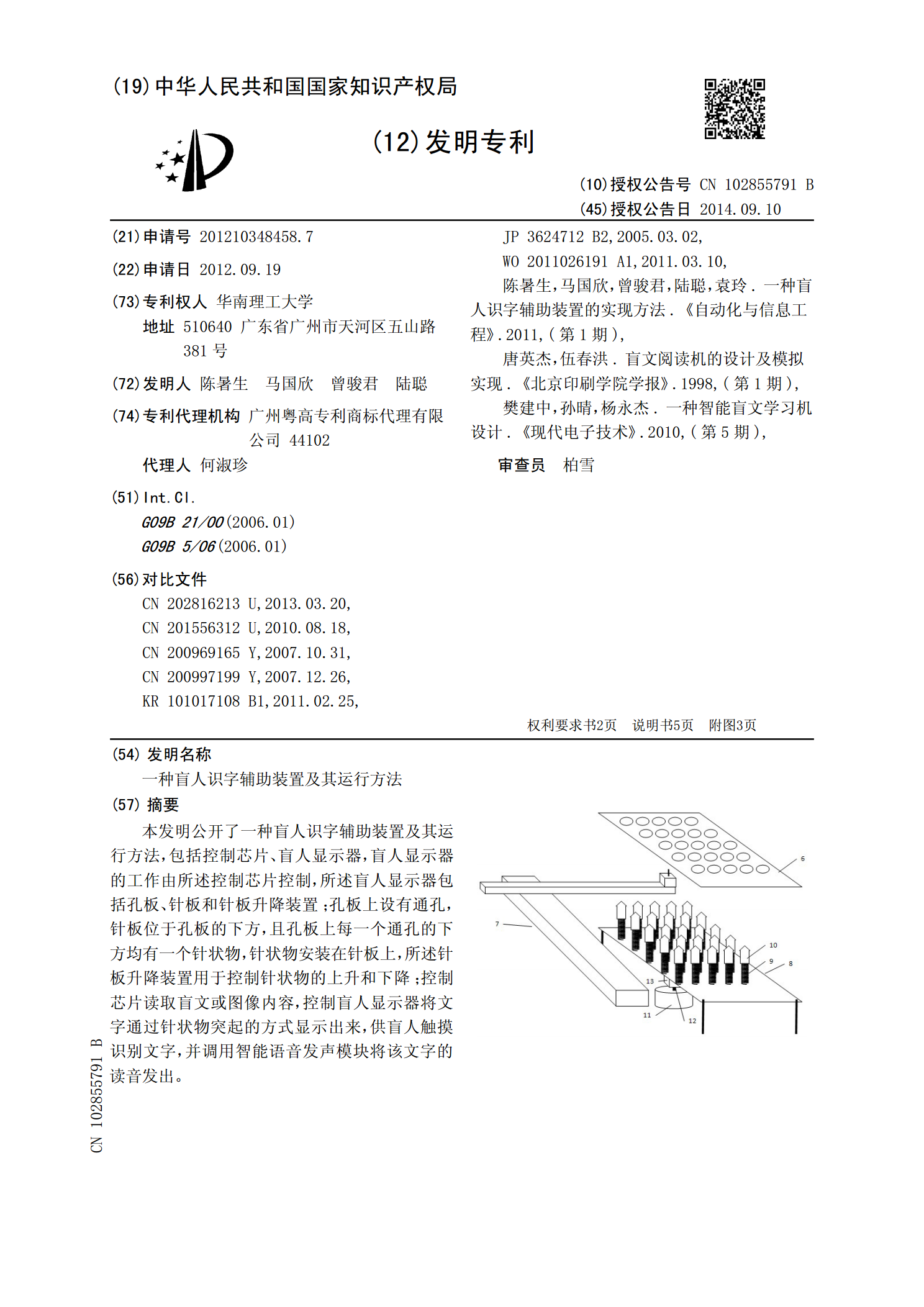
一种盲人识字辅助装置及其运行方法.pdf
本发明公开了一种盲人识字辅助装置及其运行方法,包括控制芯片、盲人显示器,盲人显示器的工作由所述控制芯片控制,所述盲人显示器包括孔板、针板和针板升降装置;孔板上设有通孔,针板位于孔板的下方,且孔板上每一个通孔的下方均有一个针状物,针状物安装在针板上,所述针板升降装置用于控制针状物的上升和下降;控制芯片读取盲文或图像内容,控制盲人显示器将文字通过针状物突起的方式显示出来,供盲人触摸识别文字,并调用智能语音发声模块将该文字的读音发出。
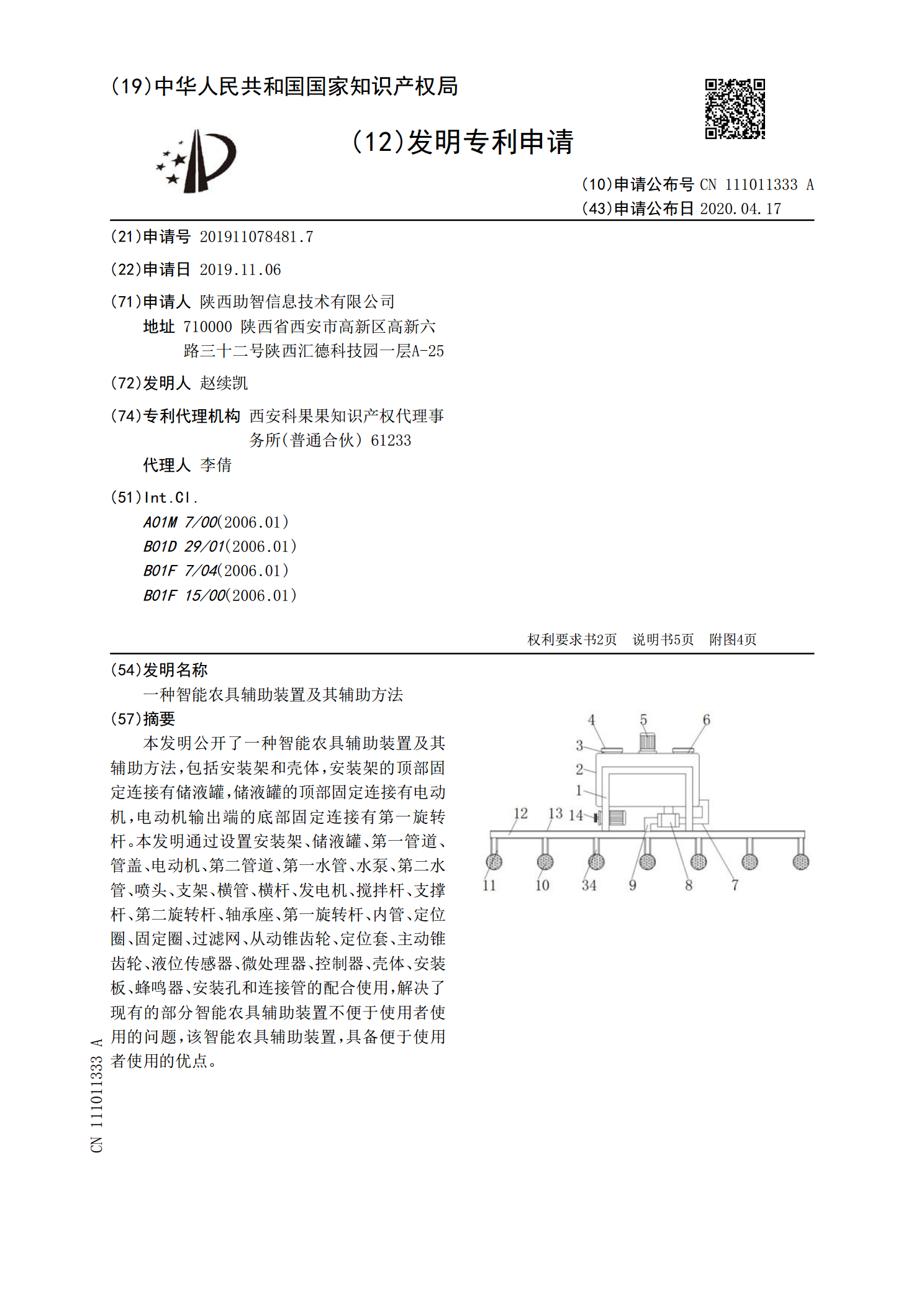
一种智能农具辅助装置及其辅助方法.pdf
本发明公开了一种智能农具辅助装置及其辅助方法,包括安装架和壳体,安装架的顶部固定连接有储液罐,储液罐的顶部固定连接有电动机,电动机输出端的底部固定连接有第一旋转杆。本发明通过设置安装架、储液罐、第一管道、管盖、电动机、第二管道、第一水管、水泵、第二水管、喷头、支架、横管、横杆、发电机、搅拌杆、支撑杆、第二旋转杆、轴承座、第一旋转杆、内管、定位圈、固定圈、过滤网、从动锥齿轮、定位套、主动锥齿轮、液位传感器、微处理器、控制器、壳体、安装板、蜂鸣器、安装孔和连接管的配合使用,解决了现有的部分智能农具辅助装置不便