
用于自动驾驶的环境感知系统布置结构.pdf

景山****魔王

1/8
2/8
3/8
4/8
5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

用于自动驾驶的环境感知系统布置结构.pdf
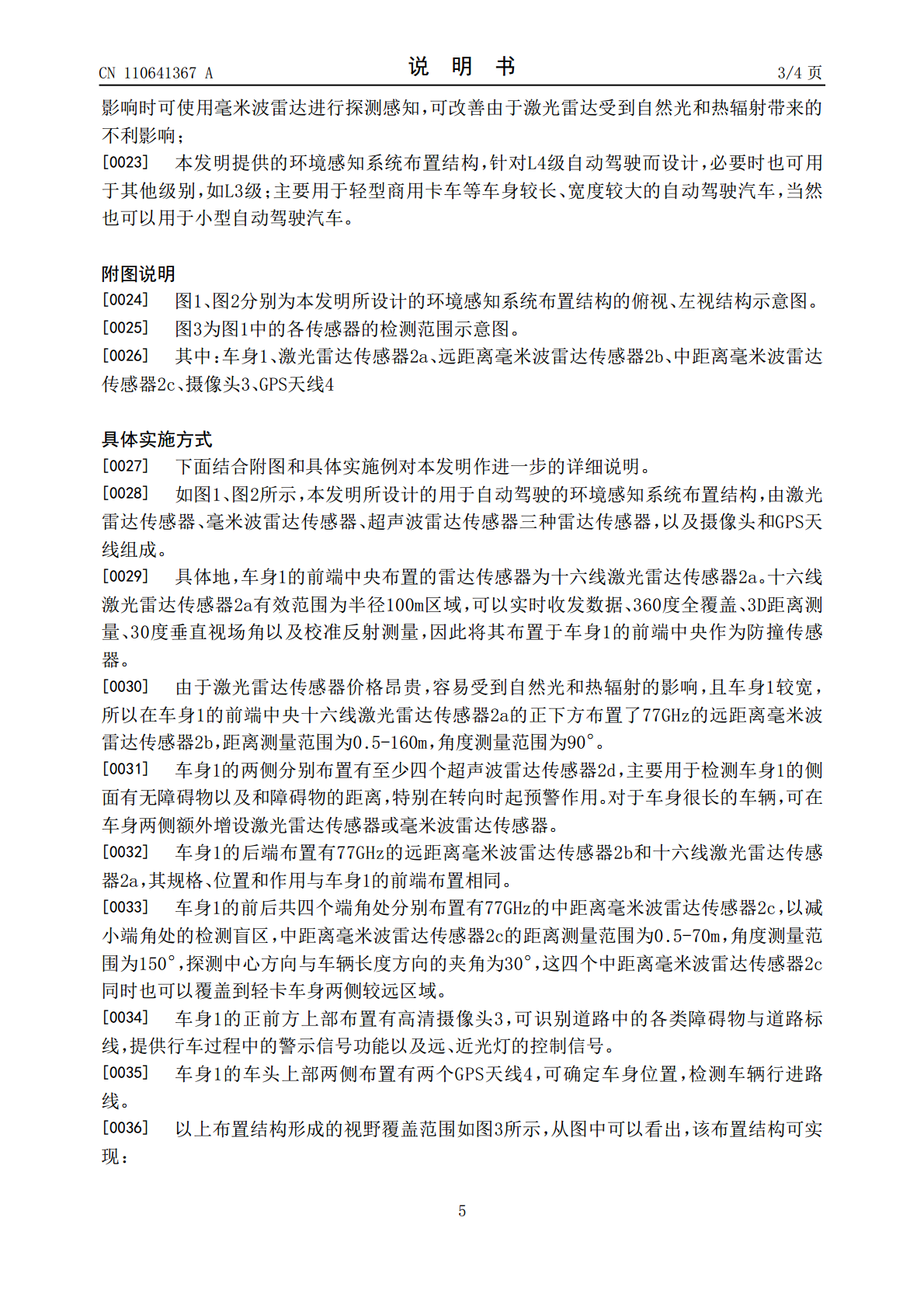
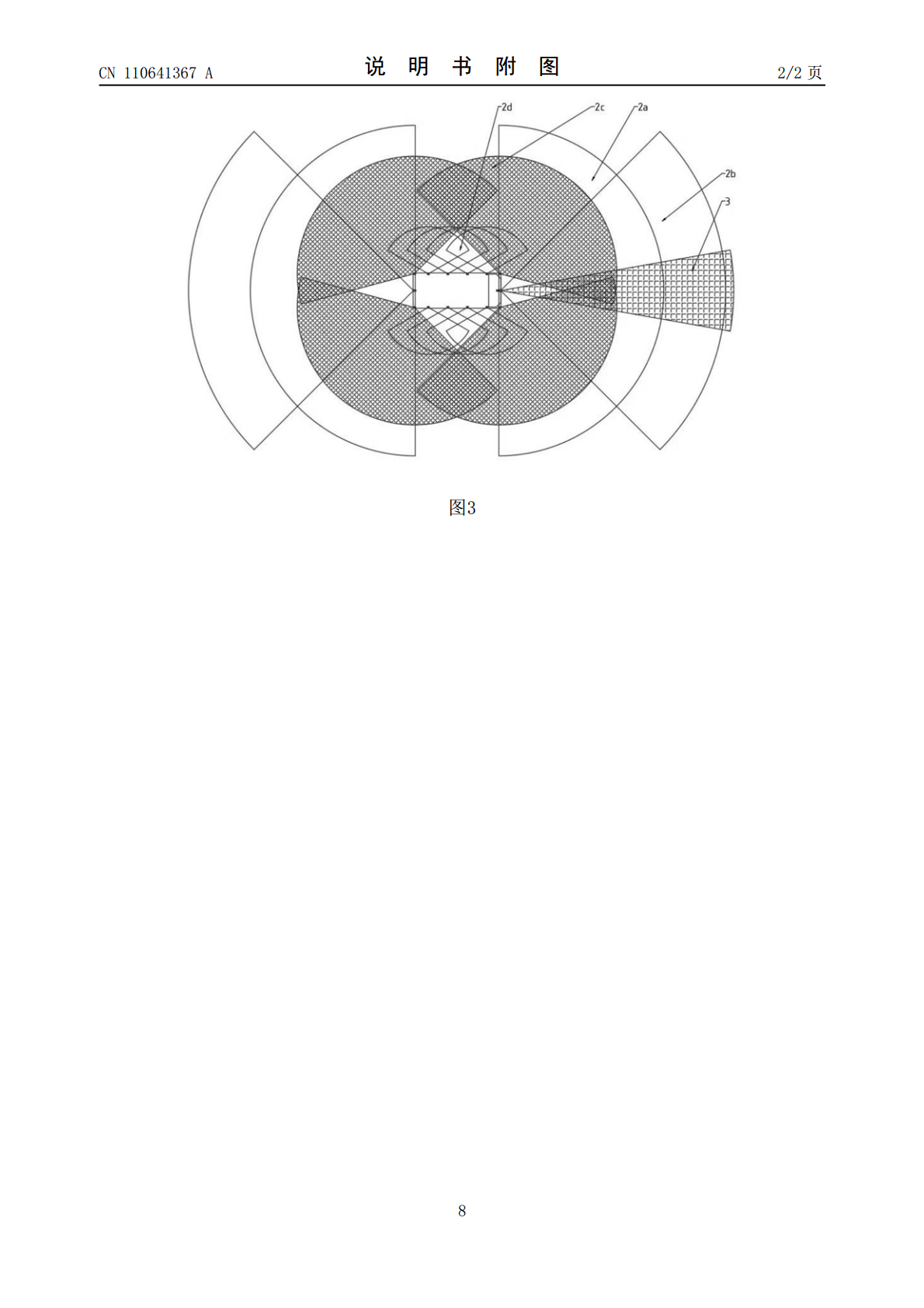
本发明公开了一种用于自动驾驶的环境感知系统布置结构,包括设置于车头前部的一个摄像头、设置于车身上部的两个GPS天线和设置于车身周向的多个雷达传感器;所述雷达传感器包括至少两个激光雷达传感器和多个毫米波雷达传感器;多个所述雷达传感器的探测范围相互协同配合形成环绕车身的无死角检测区,使车身任意角度均位于至少两个雷达传感器照射视野内,且车头正前方1~70m、180°范围内任意位置同时位于至少一个激光雷达传感器和至少一个毫米波雷达传感器的视野内。本发明各传感器布置合理,彼此相互配合,可消除视野盲区,确保行车安全。
用于自动驾驶车辆的感知辅助.pdf
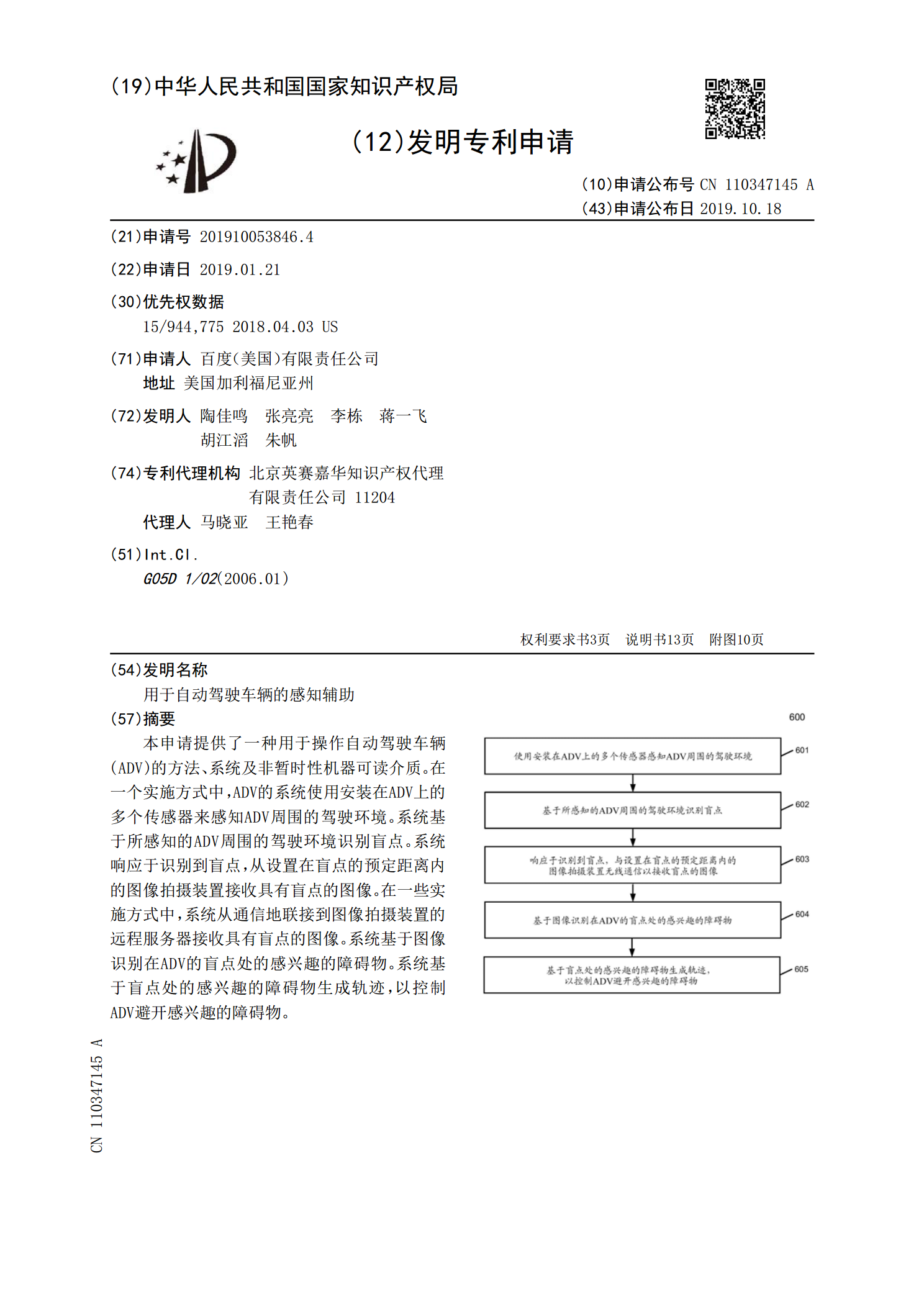
本申请提供了一种用于操作自动驾驶车辆(ADV)的方法、系统及非暂时性机器可读介质。在一个实施方式中,ADV的系统使用安装在ADV上的多个传感器来感知ADV周围的驾驶环境。系统基于所感知的ADV周围的驾驶环境识别盲点。系统响应于识别到盲点,从设置在盲点的预定距离内的图像拍摄装置接收具有盲点的图像。在一些实施方式中,系统从通信地联接到图像拍摄装置的远程服务器接收具有盲点的图像。系统基于图像识别在ADV的盲点处的感兴趣的障碍物。系统基于盲点处的感兴趣的障碍物生成轨迹,以控制ADV避开感兴趣的障碍物。
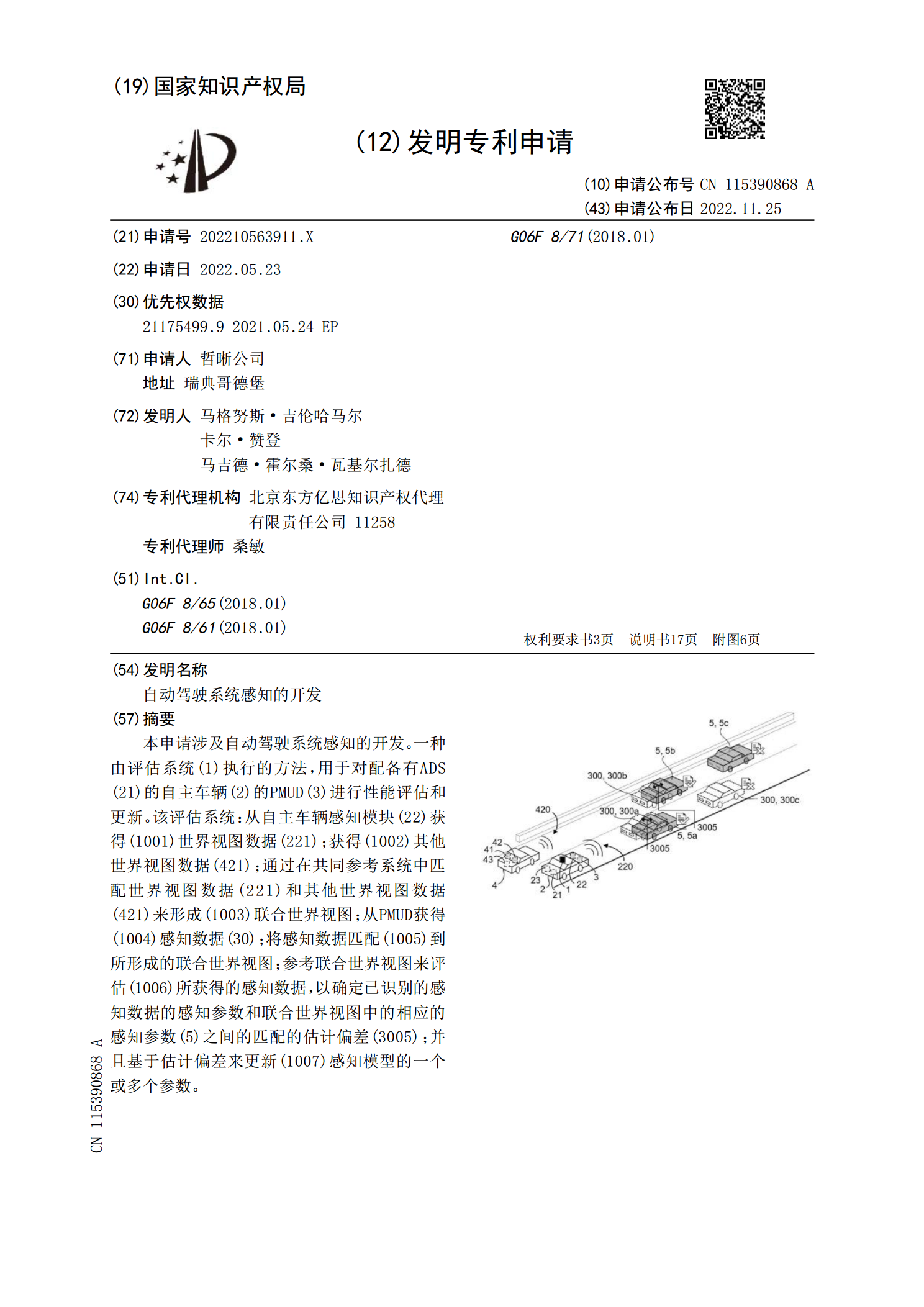
自动驾驶系统感知的开发.pdf
本申请涉及自动驾驶系统感知的开发。一种由评估系统(1)执行的方法,用于对配备有ADS(21)的自主车辆(2)的PMUD(3)进行性能评估和更新。该评估系统:从自主车辆感知模块(22)获得(1001)世界视图数据(221);获得(1002)其他世界视图数据(421);通过在共同参考系统中匹配世界视图数据(221)和其他世界视图数据(421)来形成(1003)联合世界视图;从PMUD获得(1004)感知数据(30);将感知数据匹配(1005)到所形成的联合世界视图;参考联合世界视图来评估(1006)所获得的感

用于推荐系统的图结构感知增量学习.pdf
提供了一种用于训练推荐系统(recommendersystem,RS)的系统和方法。所述RS用于针对二分图做出推荐,所述二分图包括多个用户节点、多个项目节点和定义将所述用户节点中的至少一些连接到所述项目节点中的一些的边的观察图拓扑,所述RS包括由现有参数集配置的现有图神经网络(graphneuralnetwork,GNN)模型。所述方法包括:应用损失函数计算更新的GNN模型的更新参数集,所述更新的GNN模型是使用第一参数集作为初始化参数、用新图训练的,所述损失函数用于基于所述现有GNN模型针对现有图
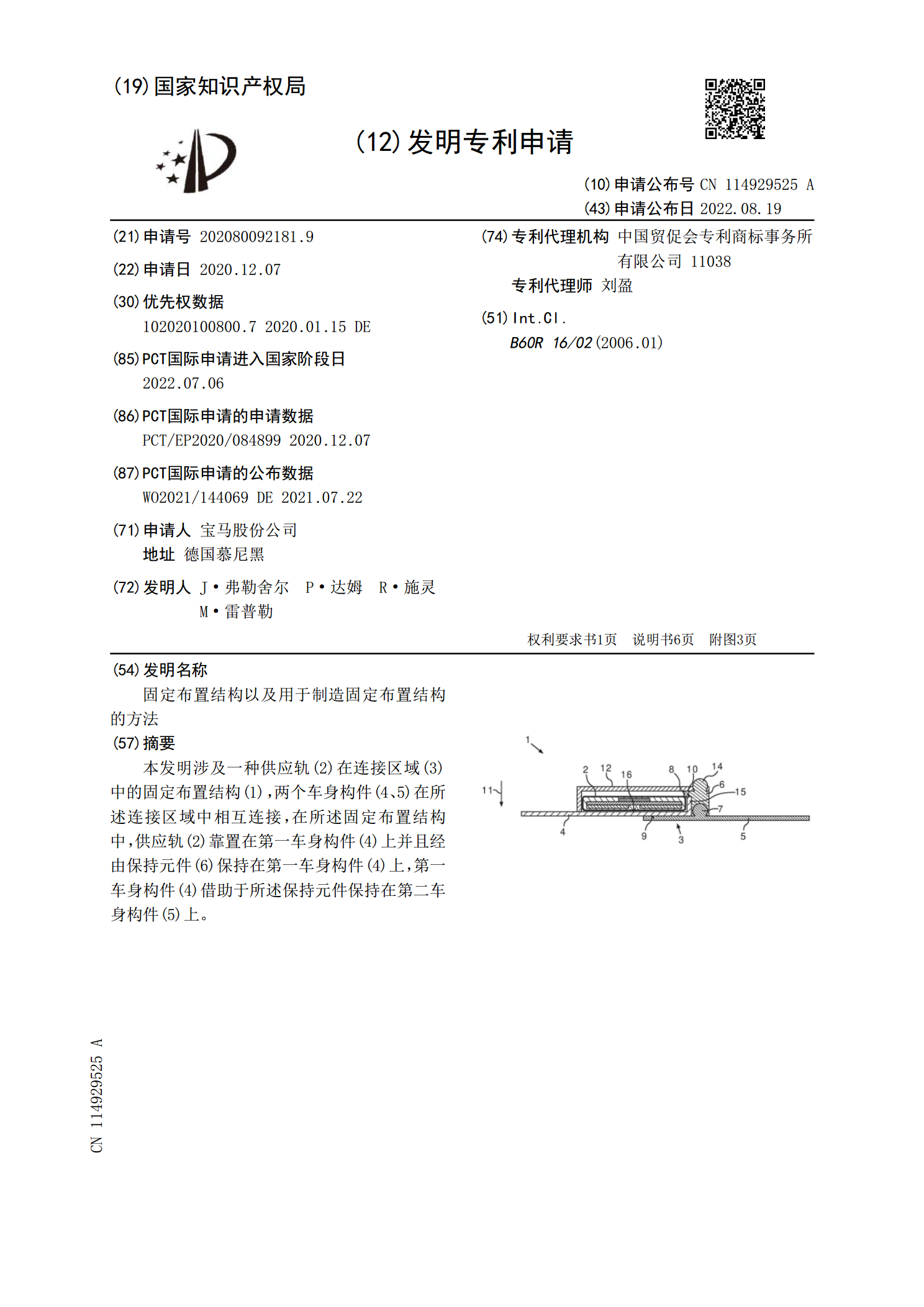
固定布置结构以及用于制造固定布置结构的方法.pdf
本发明涉及一种供应轨(2)在连接区域(3)中的固定布置结构(1),两个车身构件(4、5)在所述连接区域中相互连接,在所述固定布置结构中,供应轨(2)靠置在第一车身构件(4)上并且经由保持元件(6)保持在第一车身构件(4)上,第一车身构件(4)借助于所述保持元件保持在第二车身构件(5)上。