
一种客车盲区辅助监测系统及方法.pdf

一条****贺6

1/6

2/6
3/6

4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种客车盲区辅助监测系统及方法.pdf
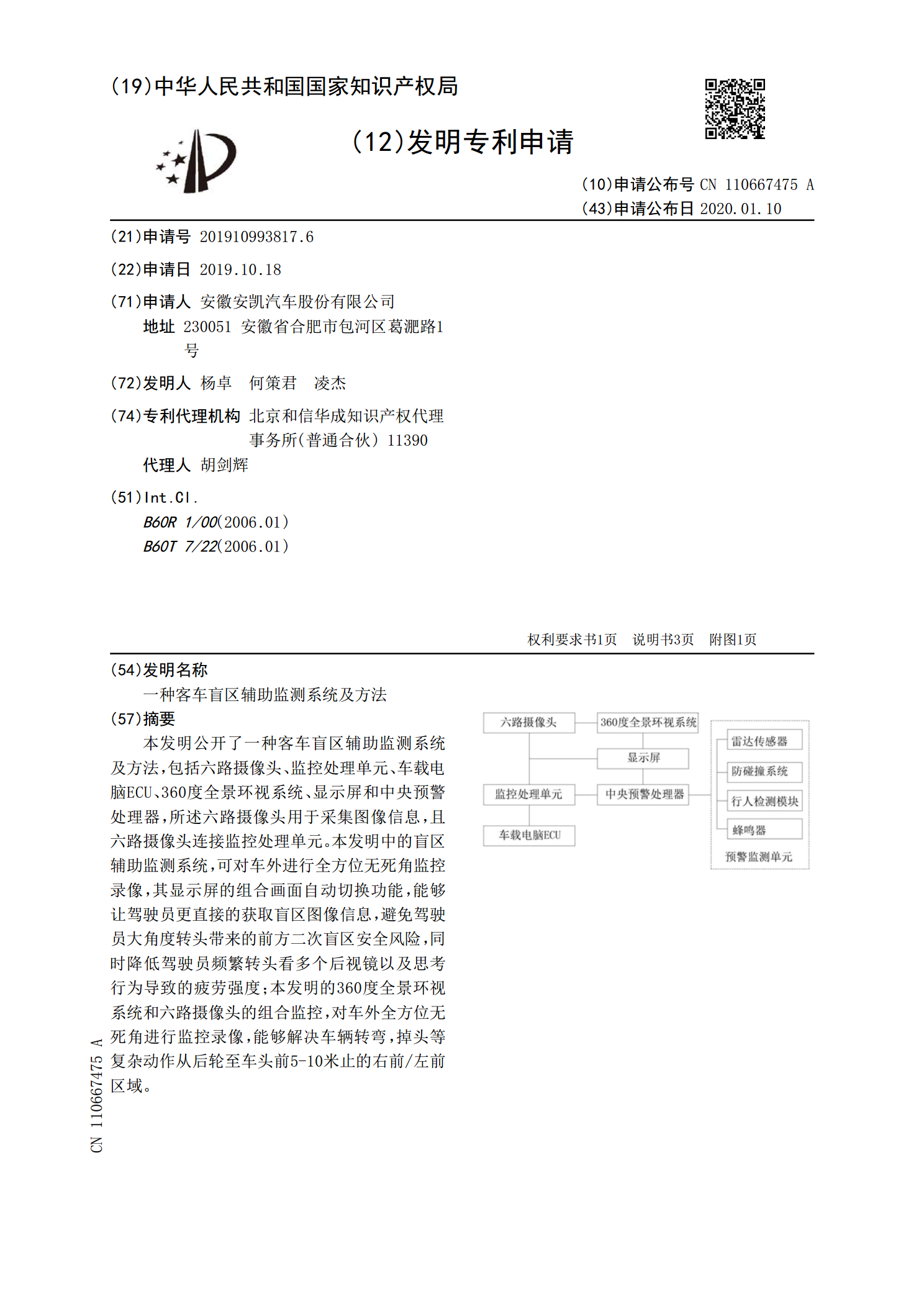
本发明公开了一种客车盲区辅助监测系统及方法,包括六路摄像头、监控处理单元、车载电脑ECU、360度全景环视系统、显示屏和中央预警处理器,所述六路摄像头用于采集图像信息,且六路摄像头连接监控处理单元。本发明中的盲区辅助监测系统,可对车外进行全方位无死角监控录像,其显示屏的组合画面自动切换功能,能够让驾驶员更直接的获取盲区图像信息,避免驾驶员大角度转头带来的前方二次盲区安全风险,同时降低驾驶员频繁转头看多个后视镜以及思考行为导致的疲劳强度;本发明的360度全景环视系统和六路摄像头的组合监控,对车外全方位无死角

大客车盲区监测辅助驾驶方法及系统.pdf
本发明公开了一种大客车盲区监测辅助驾驶方法及系统。本发明的辅助驾驶方法包括:在大客车上设置车体周边探测系统,该车体周边探测系统能够探测获取大客车车体周边障碍物相对于大客车车体的方位数据;在大客车车体周边划设警戒区域;在大客车行驶过程中,通过车体周边探测系统获取大客车车体周边障碍物相对于大客车车体的方位数据,判断得出障碍物所处的警戒区域位置;依据障碍物所处的警戒区域位置,为大客车驾驶员提供避让障碍物辅助,以帮助驾驶员控制大客车车体避免与障碍物发生碰撞。本发明的辅助驾驶系统能够实现上述方法。本发明的辅助驾驶方
一种车辆盲区监测辅助系统及方法.pdf
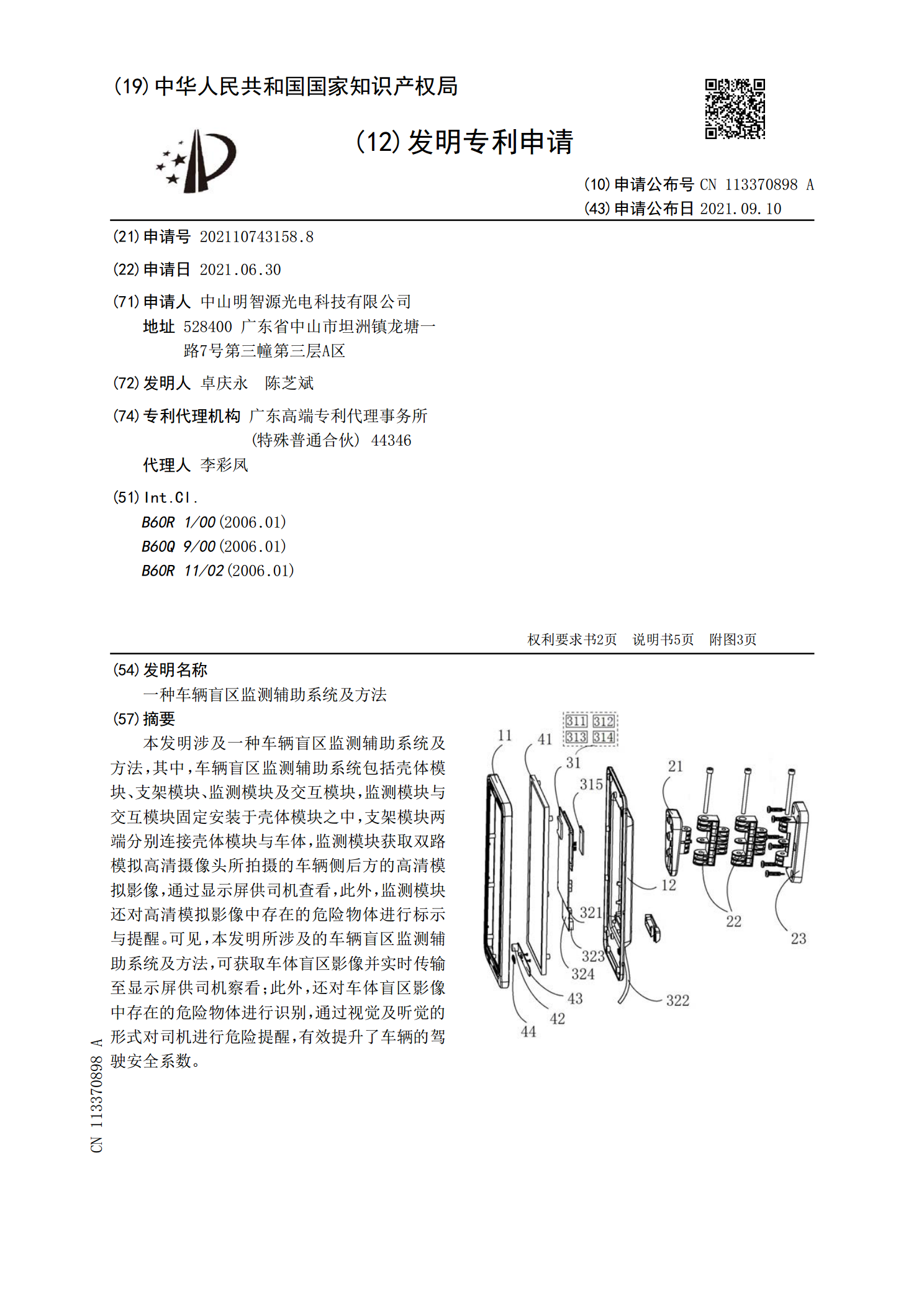
本发明涉及一种车辆盲区监测辅助系统及方法,其中,车辆盲区监测辅助系统包括壳体模块、支架模块、监测模块及交互模块,监测模块与交互模块固定安装于壳体模块之中,支架模块两端分别连接壳体模块与车体,监测模块获取双路模拟高清摄像头所拍摄的车辆侧后方的高清模拟影像,通过显示屏供司机查看,此外,监测模块还对高清模拟影像中存在的危险物体进行标示与提醒。可见,本发明所涉及的车辆盲区监测辅助系统及方法,可获取车体盲区影像并实时传输至显示屏供司机察看;此外,还对车体盲区影像中存在的危险物体进行识别,通过视觉及听觉的形式对司机进
一种基于盲区监测的汽车辅助驾驶系统及辅助驾驶方法.pdf
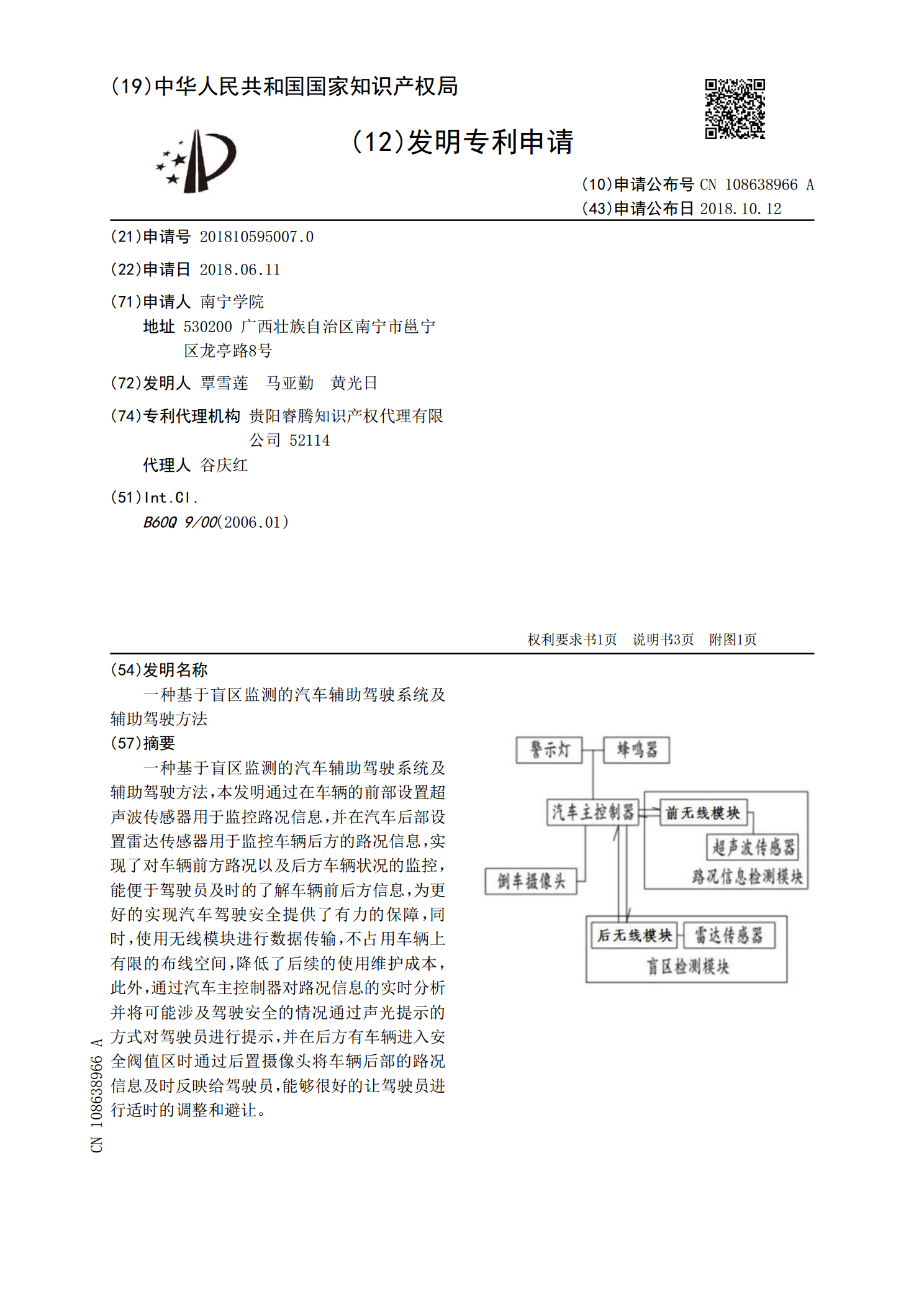
一种基于盲区监测的汽车辅助驾驶系统及辅助驾驶方法,本发明通过在车辆的前部设置超声波传感器用于监控路况信息,并在汽车后部设置雷达传感器用于监控车辆后方的路况信息,实现了对车辆前方路况以及后方车辆状况的监控,能便于驾驶员及时的了解车辆前后方信息,为更好的实现汽车驾驶安全提供了有力的保障,同时,使用无线模块进行数据传输,不占用车辆上有限的布线空间,降低了后续的使用维护成本,此外,通过汽车主控制器对路况信息的实时分析并将可能涉及驾驶安全的情况通过声光提示的方式对驾驶员进行提示,并在后方有车辆进入安全阀值区时通过后

一种基于盲区监测的车道保持辅助方法及系统.pdf
本发明涉及汽车控制安全领域,具体涉及一种基于盲区监测的车道保持辅助方法及系统。设置车辆的报警阈值,使所述报警阈值包括低报警阈值和高报警阈值;采集车辆侧后方交通信息,当所述车辆侧后方交通信息表明有车辆侧后方有其他车辆高速驶入时,将车辆的报警阈值调整为低报警阈值;当所述车辆侧后方交通信息表明车辆侧后方无其他车辆高速驶入时,将车辆的报警阈值调整为高报警阈值;根据采集到的道路实时信息对车道偏离状态进行计算,当计算所得的车道偏离状态值大于相应的报警阈值时,进行报警信号输出。既提高了车辆的安全性,又避免了频繁报警引起