
大型储罐底板腐蚀浸入式声学全域检测方法.pdf

mm****酱吖


1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

大型储罐底板腐蚀浸入式声学全域检测方法.pdf
本发明涉及的是大型储罐底板腐蚀浸入式声学全域检测方法,它包括:利用五个浸入式声发射传感器构成十字型检测阵列,然后将搭载十字型检测阵列的检测仪,通过罐顶人孔处投放到带有介质的储罐内部底板上;驱使检测仪到达起始检测单元处;打开声学检测系统并对该检测单元进行一段固定时间地声信号采集,在检测结束后关闭声学检测系统,并沿着规划路径到达下一个检测单元检测,直至到达终点检测单元并完成检测任务,从而实现大型储罐底板腐蚀的全域检测。本发明通过移动式五元十字基阵声学定位方法对储罐底板腐蚀进行分块式全域检测,有效地解决了大型储

大型储罐底板腐蚀浸入式自动声学检测仪.pdf
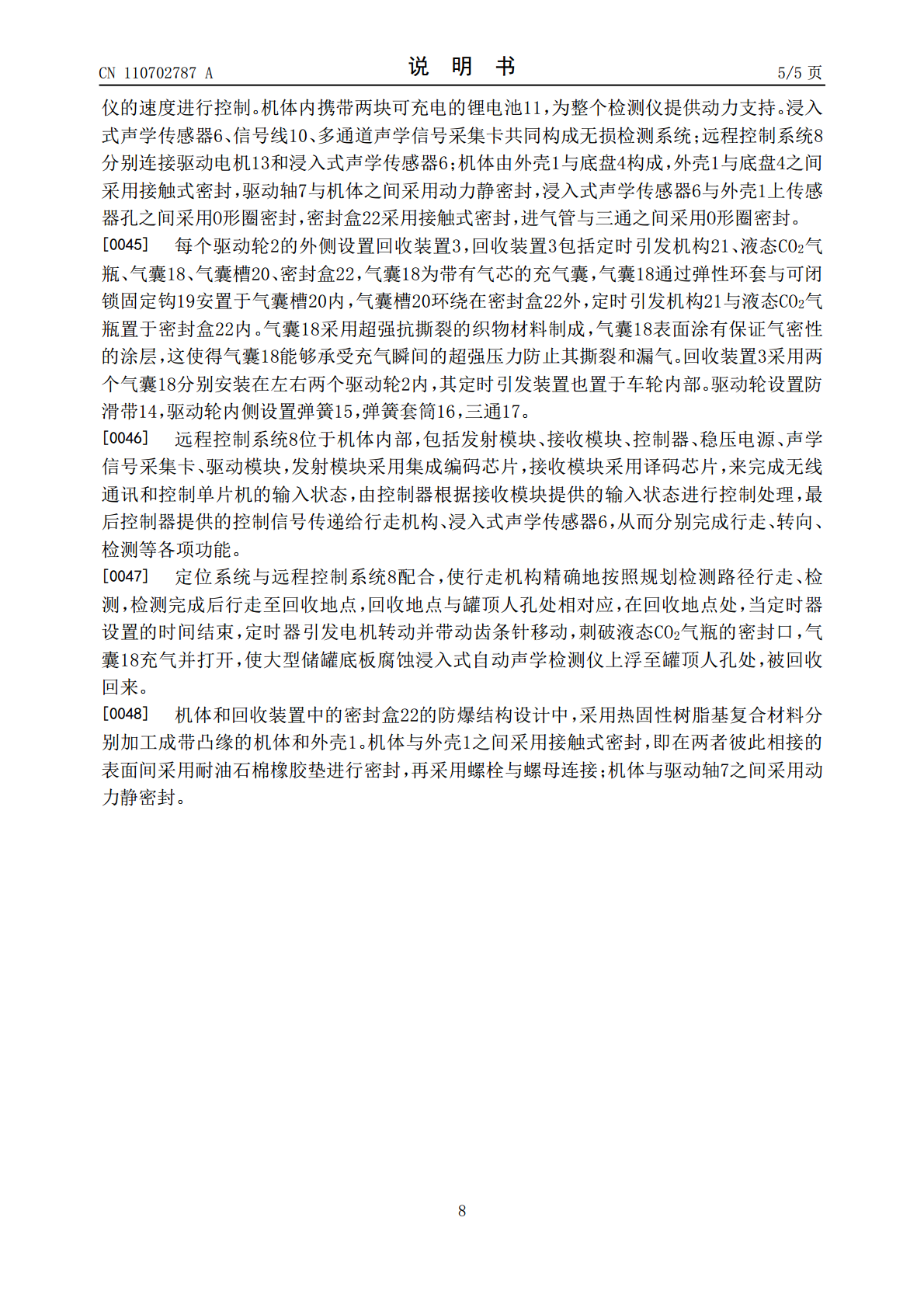
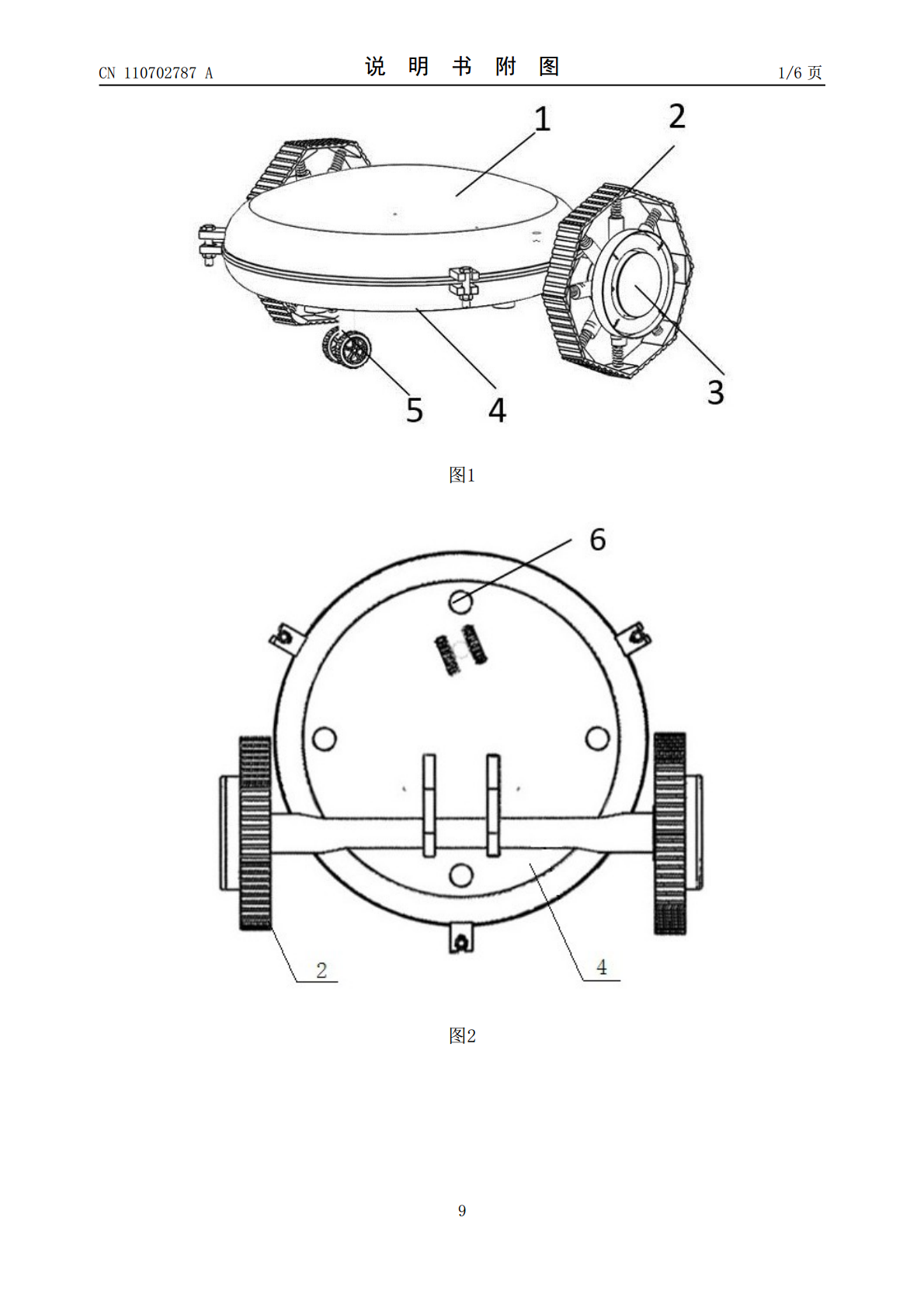
本发明涉及的是大型储罐底板腐蚀浸入式自动声学检测仪,它包括机体、行走机构、远程控制系统、定位系统、浸入式声学传感器、回收装置,驱动轮安装在机体两侧,每个驱动轮的外侧设置回收装置,回收装置包括定时引发机构、液态CO

大型储罐底板浸入式声学检测方法及样机设计.pptx
大型储罐底板浸入式声学检测方法及样机设计目录大型储罐底板浸入式声学检测方法检测原理检测过程检测结果分析检测方法的优缺点大型储罐底板浸入式声学检测样机设计设计思路结构设计硬件选型软件开发大型储罐底板浸入式声学检测样机应用应用场景应用效果应用案例应用前景大型储罐底板浸入式声学检测样机改进方向硬件改进方向软件改进方向检测方法改进方向实际应用中的问题及解决方案感谢观看
用于检测大型储罐底板腐蚀缺陷的检测方法.pdf
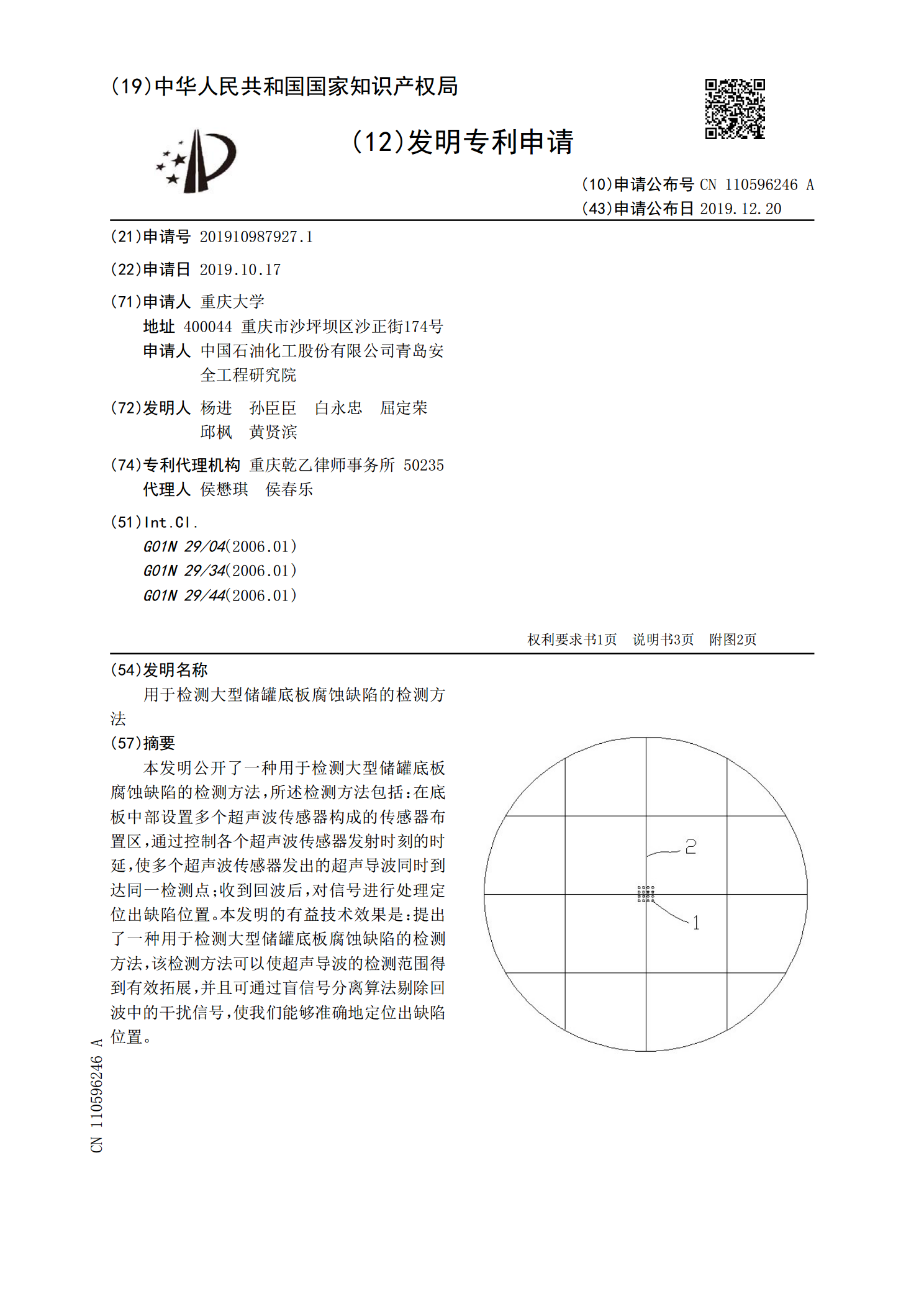
本发明公开了一种用于检测大型储罐底板腐蚀缺陷的检测方法,所述检测方法包括:在底板中部设置多个超声波传感器构成的传感器布置区,通过控制各个超声波传感器发射时刻的时延,使多个超声波传感器发出的超声导波同时到达同一检测点;收到回波后,对信号进行处理定位出缺陷位置。本发明的有益技术效果是:提出了一种用于检测大型储罐底板腐蚀缺陷的检测方法,该检测方法可以使超声导波的检测范围得到有效拓展,并且可通过盲信号分离算法剔除回波中的干扰信号,使我们能够准确地定位出缺陷位置。

储罐底板腐蚀内置式声发射检测方法.pdf
本发明涉及的是储罐底板腐蚀内置式声发射检测方法,该方法为:安装内置式声发射检测装置,储罐外壁靠近底板的位置,等高度均布一圈声发射传感器;开启内置式声发射检测装置,主动辊轮带动铝塑管下行,传感器盒开始向下移动,通过深度计表的读数,确定所投放声发射传感器的垂直位移;通过声学材料特性矩阵测试,确定所投放传感器的水平位置和灵敏度,最终到达预定位置,开始检测;数据采集完成后,开启自吸泵,喷淋除油剂,通过盘线车使传感器盒升起,去除铝塑管外壁的原油。本发明将声发射传感器深入到储罐内,与储罐外壁布置的传感器形成阵列,共同