
车辆盲区行人监控方法和装置.pdf

白真****ng

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆盲区行人监控方法和装置.pdf
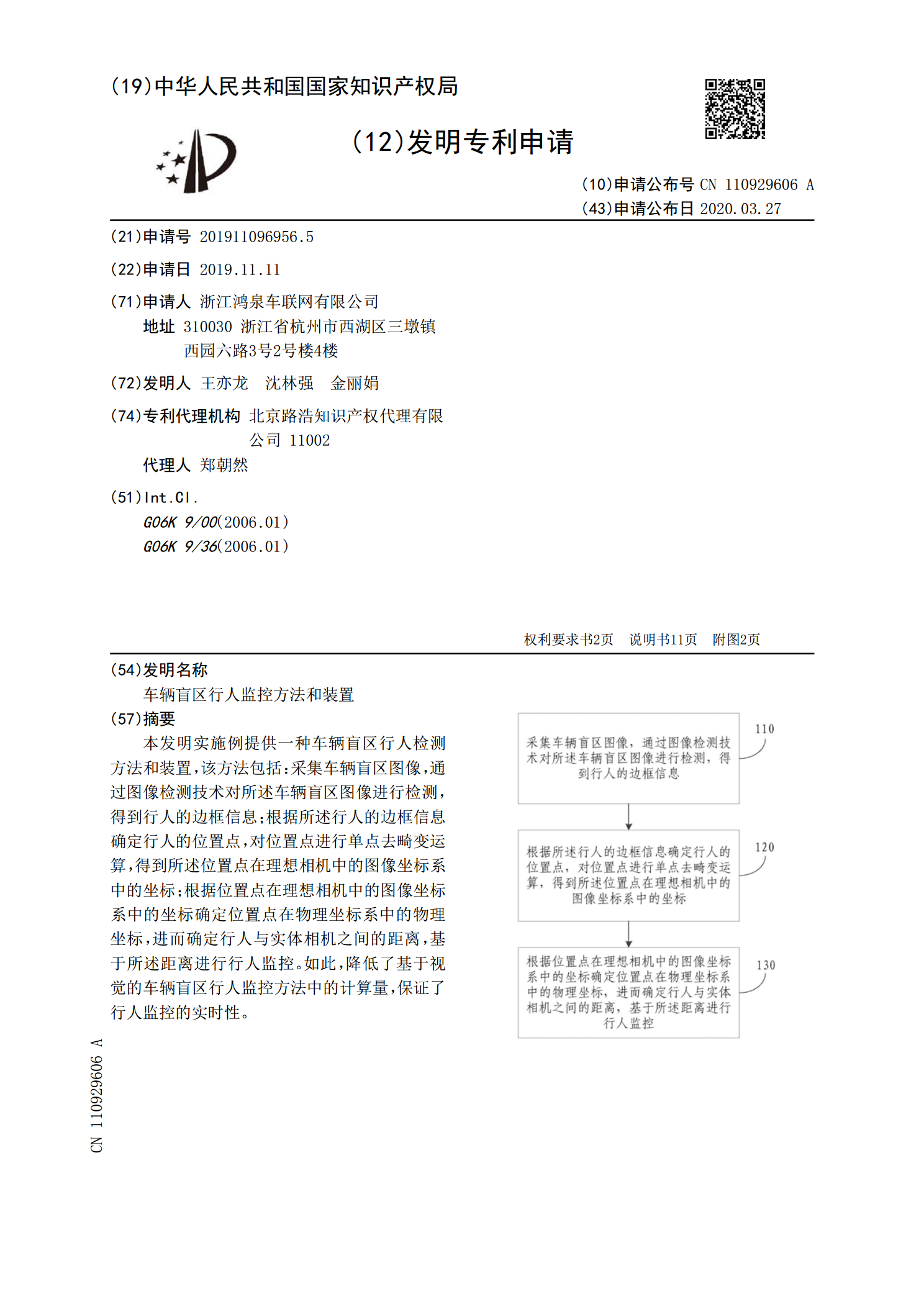
本发明实施例提供一种车辆盲区行人检测方法和装置,该方法包括:采集车辆盲区图像,通过图像检测技术对所述车辆盲区图像进行检测,得到行人的边框信息;根据所述行人的边框信息确定行人的位置点,对位置点进行单点去畸变运算,得到所述位置点在理想相机中的图像坐标系中的坐标;根据位置点在理想相机中的图像坐标系中的坐标确定位置点在物理坐标系中的物理坐标,进而确定行人与实体相机之间的距离,基于所述距离进行行人监控。如此,降低了基于视觉的车辆盲区行人监控方法中的计算量,保证了行人监控的实时性。

行人监控方法和装置.pdf
本发明的实施例提供了一种行人监控方法和装置。该行人监控方法包括:获取视频;检测视频包含的一个或多个行人;对于一个或多个行人中的每一个,识别该行人的身份;对于一个或多个行人中的每一个,确定该行人在包含该行人的至少一个视频帧中的动作;以及对于一个或多个行人中的每一个,根据该行人的身份和该行人在包含该行人的至少一个视频帧中的动作确定该行人是否做出异常行为。上述行人监控方法和装置综合考虑行人的身份及其动作来判定其是否做出异常行为,因此可以更加智能、高效、准确地检测异常行为的发生,通过这种方法可以有效保障被监控区域
车辆盲区的监控方法、系统及车辆.pdf
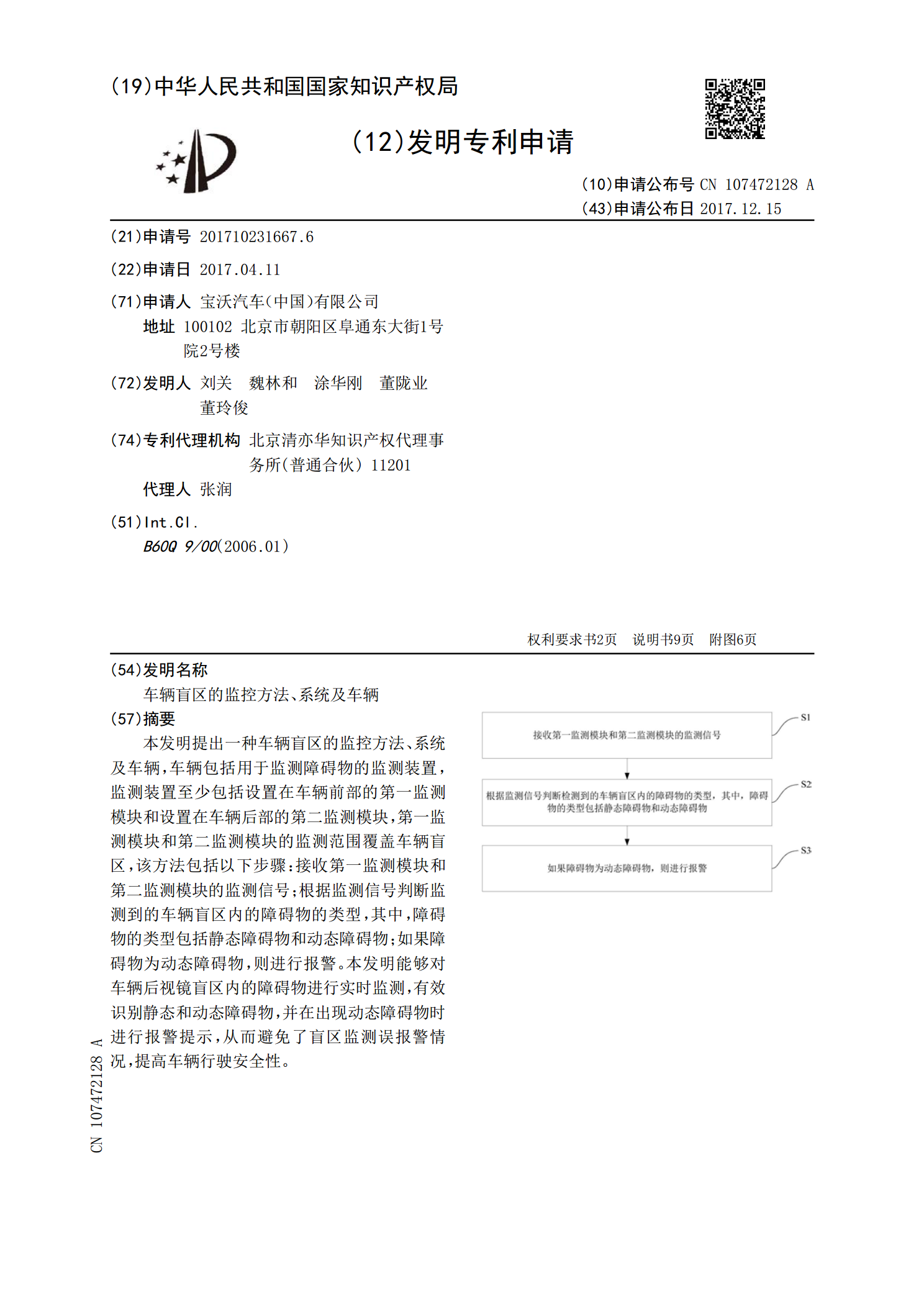
本发明提出一种车辆盲区的监控方法、系统及车辆,车辆包括用于监测障碍物的监测装置,监测装置至少包括设置在车辆前部的第一监测模块和设置在车辆后部的第二监测模块,第一监测模块和第二监测模块的监测范围覆盖车辆盲区,该方法包括以下步骤:接收第一监测模块和第二监测模块的监测信号;根据监测信号判断监测到的车辆盲区内的障碍物的类型,其中,障碍物的类型包括静态障碍物和动态障碍物;如果障碍物为动态障碍物,则进行报警。本发明能够对车辆后视镜盲区内的障碍物进行实时监测,有效识别静态和动态障碍物,并在出现动态障碍物时进行报警提示,
用于监测车辆盲区的方法和装置.pdf
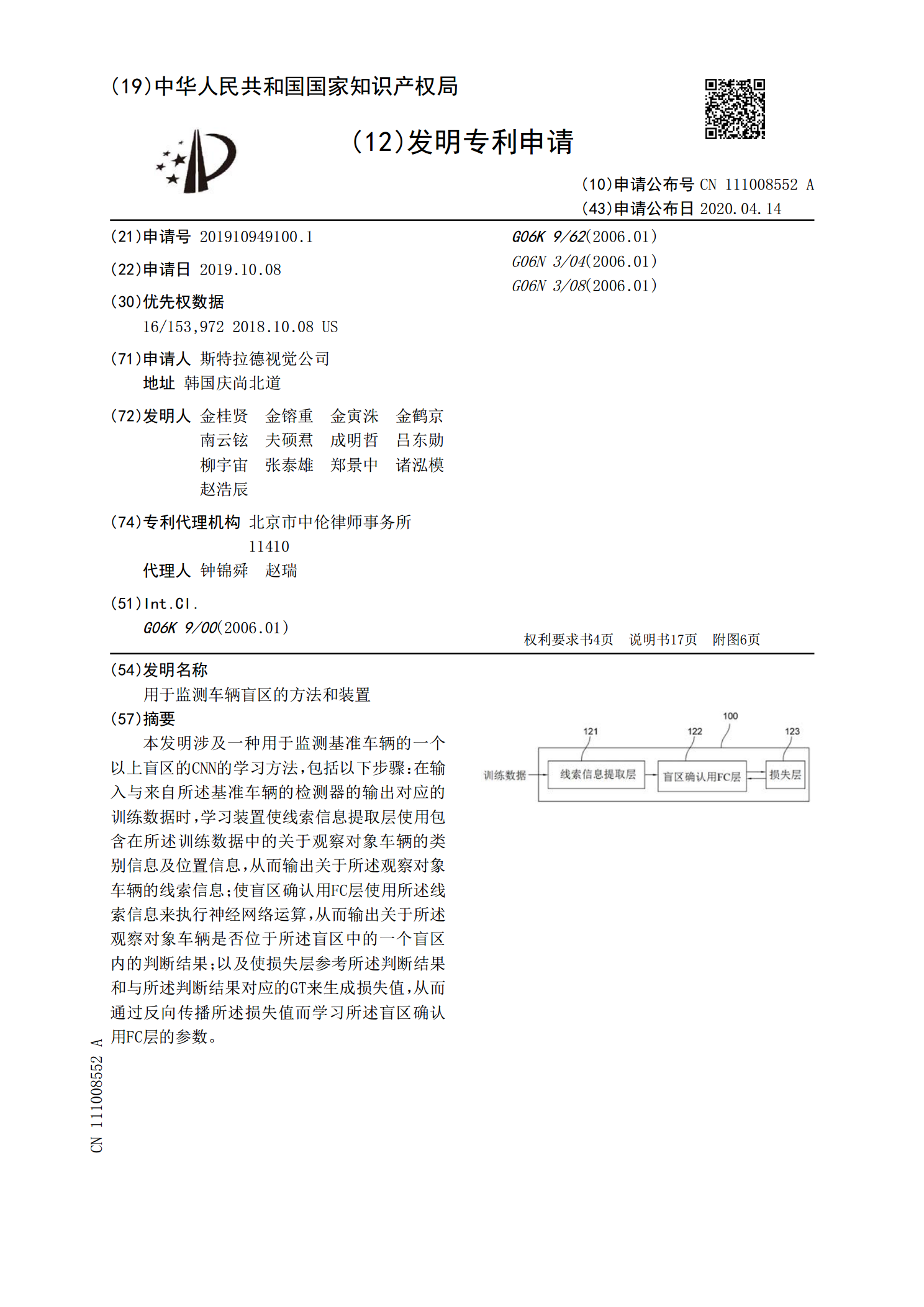
本发明涉及一种用于监测基准车辆的一个以上盲区的CNN的学习方法,包括以下步骤:在输入与来自所述基准车辆的检测器的输出对应的训练数据时,学习装置使线索信息提取层使用包含在所述训练数据中的关于观察对象车辆的类别信息及位置信息,从而输出关于所述观察对象车辆的线索信息;使盲区确认用FC层使用所述线索信息来执行神经网络运算,从而输出关于所述观察对象车辆是否位于所述盲区中的一个盲区内的判断结果;以及使损失层参考所述判断结果和与所述判断结果对应的GT来生成损失值,从而通过反向传播所述损失值而学习所述盲区确认用FC层的参
用于监测车辆盲区的方法和装置.pdf
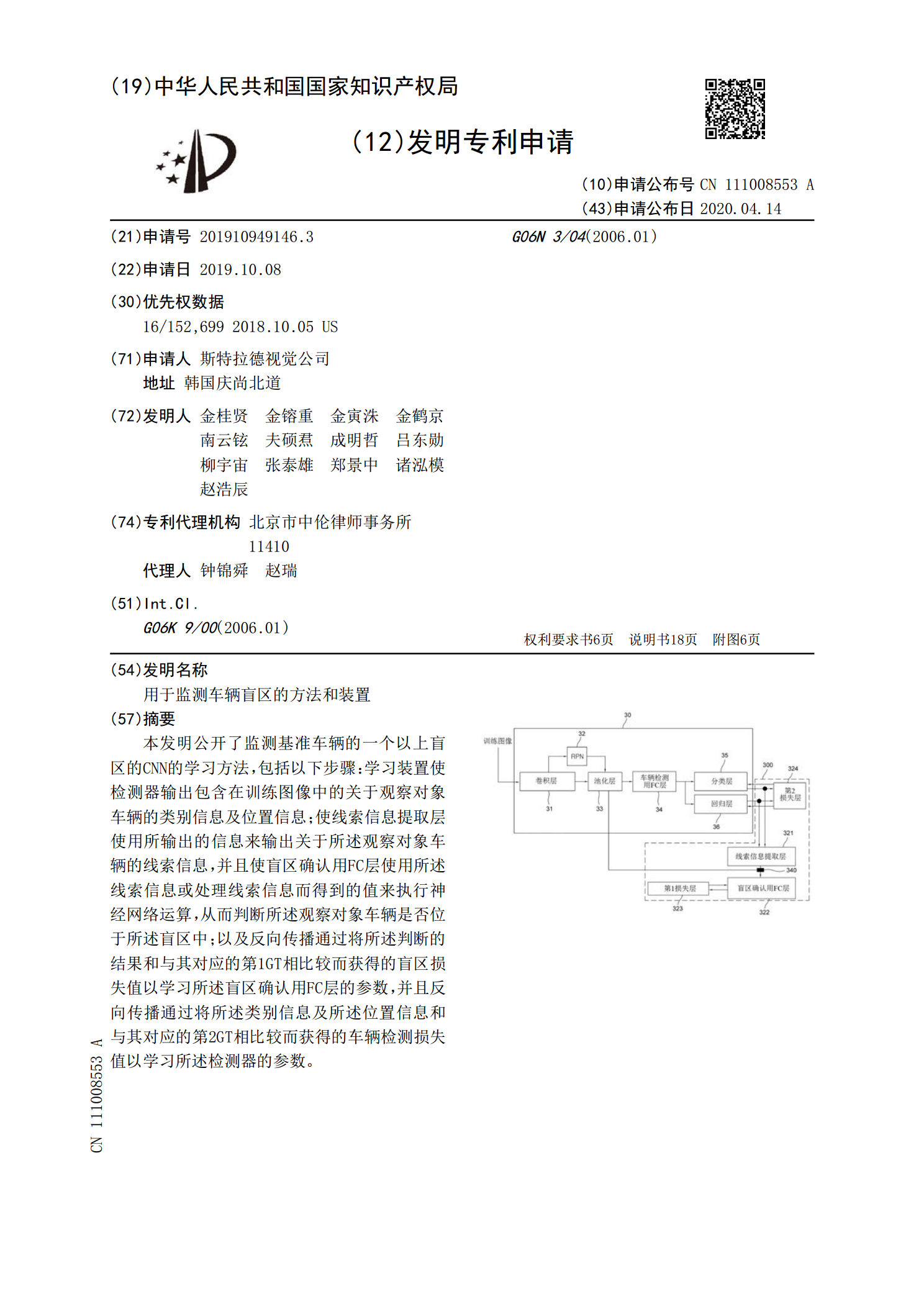
本发明公开了监测基准车辆的一个以上盲区的CNN的学习方法,包括以下步骤:学习装置使检测器输出包含在训练图像中的关于观察对象车辆的类别信息及位置信息;使线索信息提取层使用所输出的信息来输出关于所述观察对象车辆的线索信息,并且使盲区确认用FC层使用所述线索信息或处理线索信息而得到的值来执行神经网络运算,从而判断所述观察对象车辆是否位于所述盲区中;以及反向传播通过将所述判断的结果和与其对应的第1GT相比较而获得的盲区损失值以学习所述盲区确认用FC层的参数,并且反向传播通过将所述类别信息及所述位置信息和与其对应的