
一种面向点目标的红外焦平面盲元动态检测方法.pdf

小忆****ng

1/10
2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种面向点目标的红外焦平面盲元动态检测方法.pdf
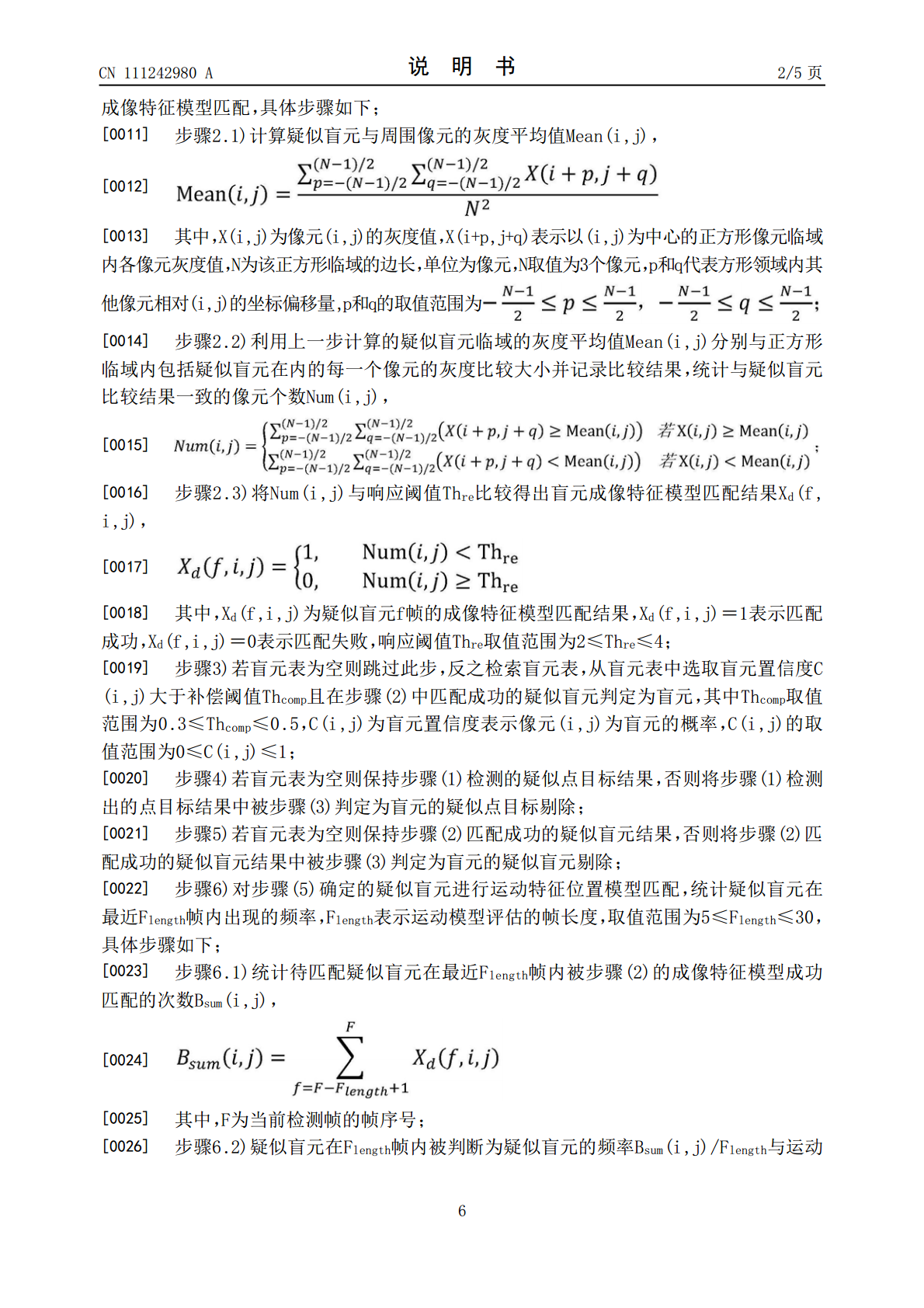
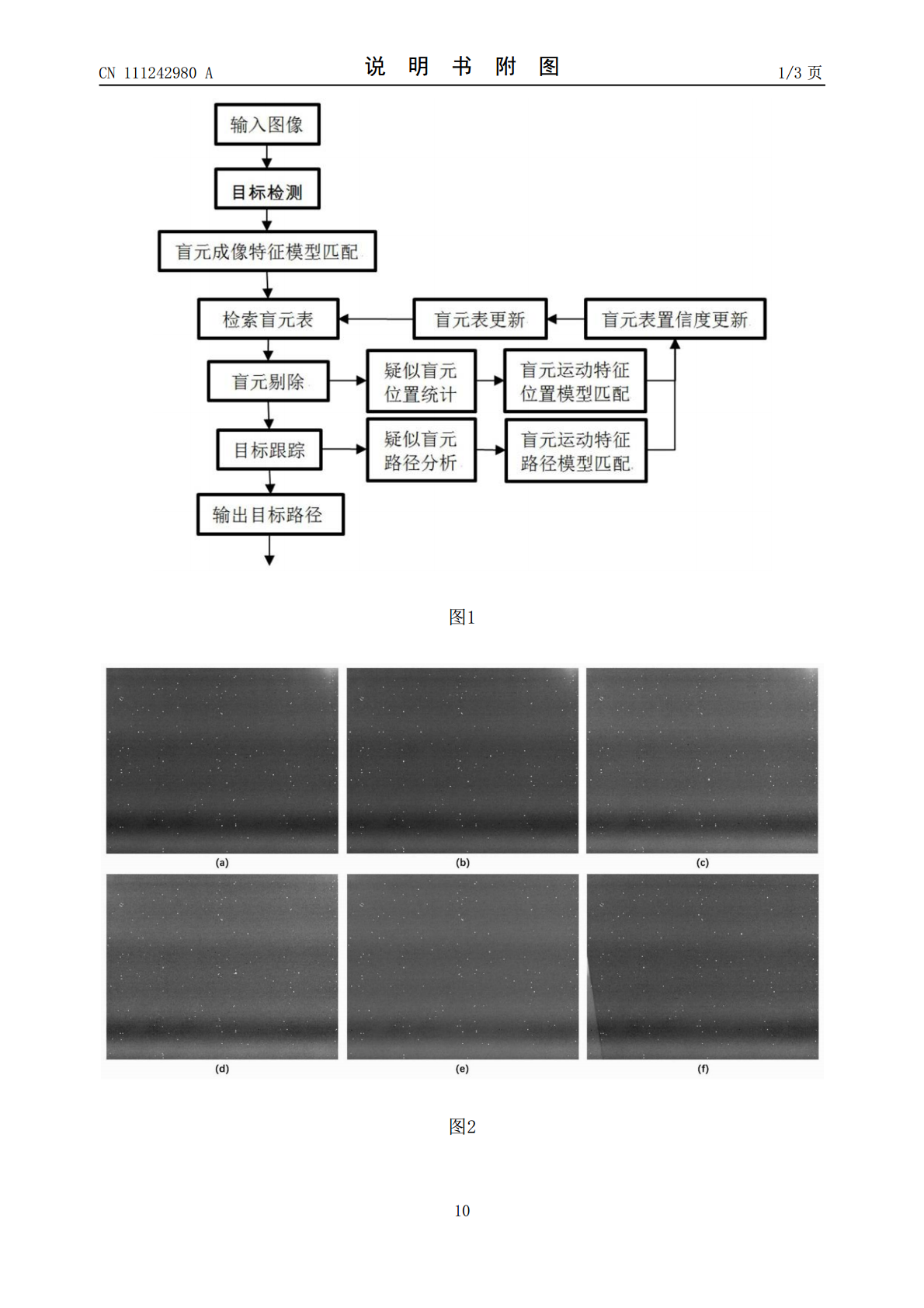
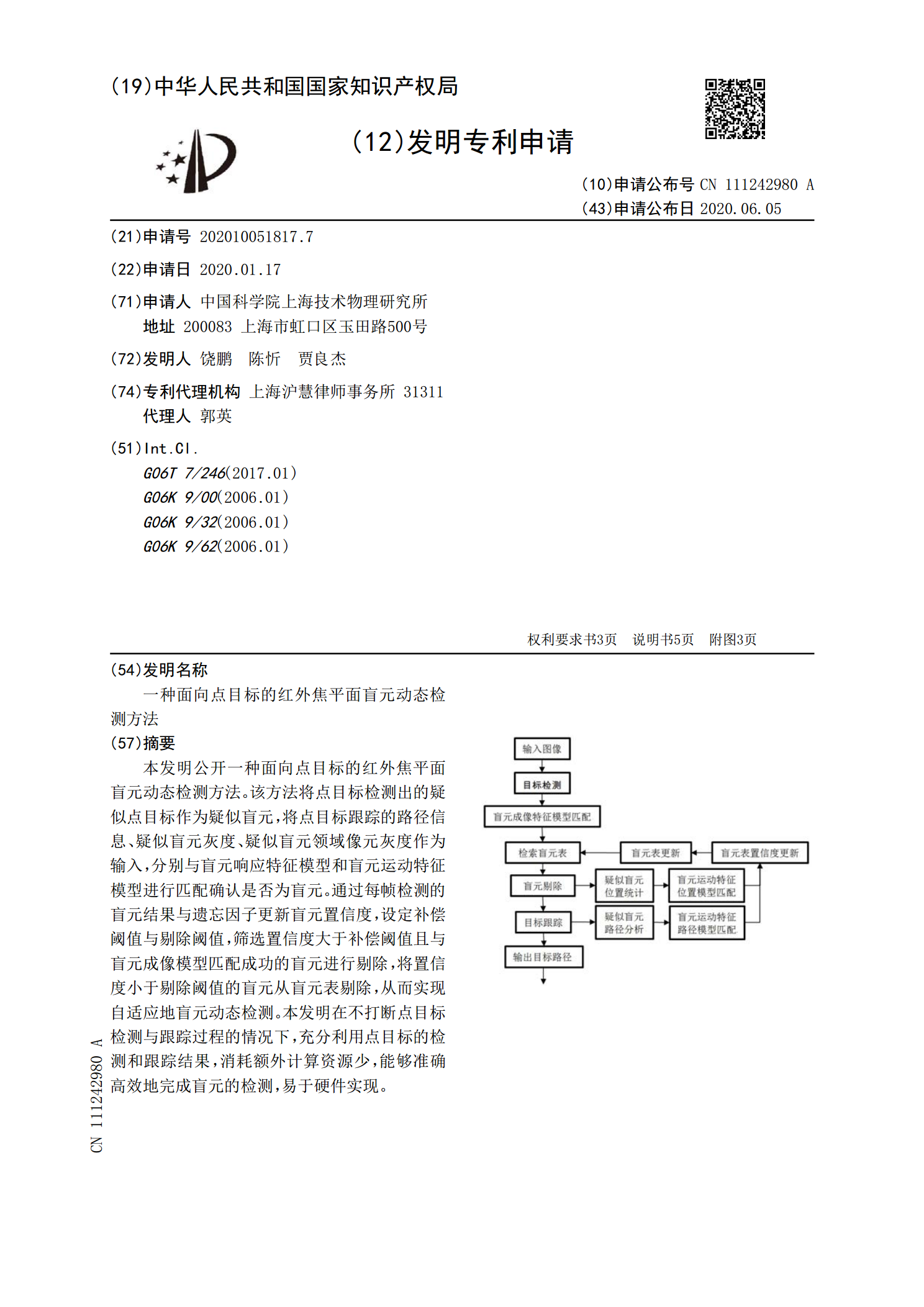
本发明公开一种面向点目标的红外焦平面盲元动态检测方法。该方法将点目标检测出的疑似点目标作为疑似盲元,将点目标跟踪的路径信息、疑似盲元灰度、疑似盲元领域像元灰度作为输入,分别与盲元响应特征模型和盲元运动特征模型进行匹配确认是否为盲元。通过每帧检测的盲元结果与遗忘因子更新盲元置信度,设定补偿阈值与剔除阈值,筛选置信度大于补偿阈值且与盲元成像模型匹配成功的盲元进行剔除,将置信度小于剔除阈值的盲元从盲元表剔除,从而实现自适应地盲元动态检测。本发明在不打断点目标检测与跟踪过程的情况下,充分利用点目标的检测和跟踪结果
红外焦平面器件盲元检测方法.pdf
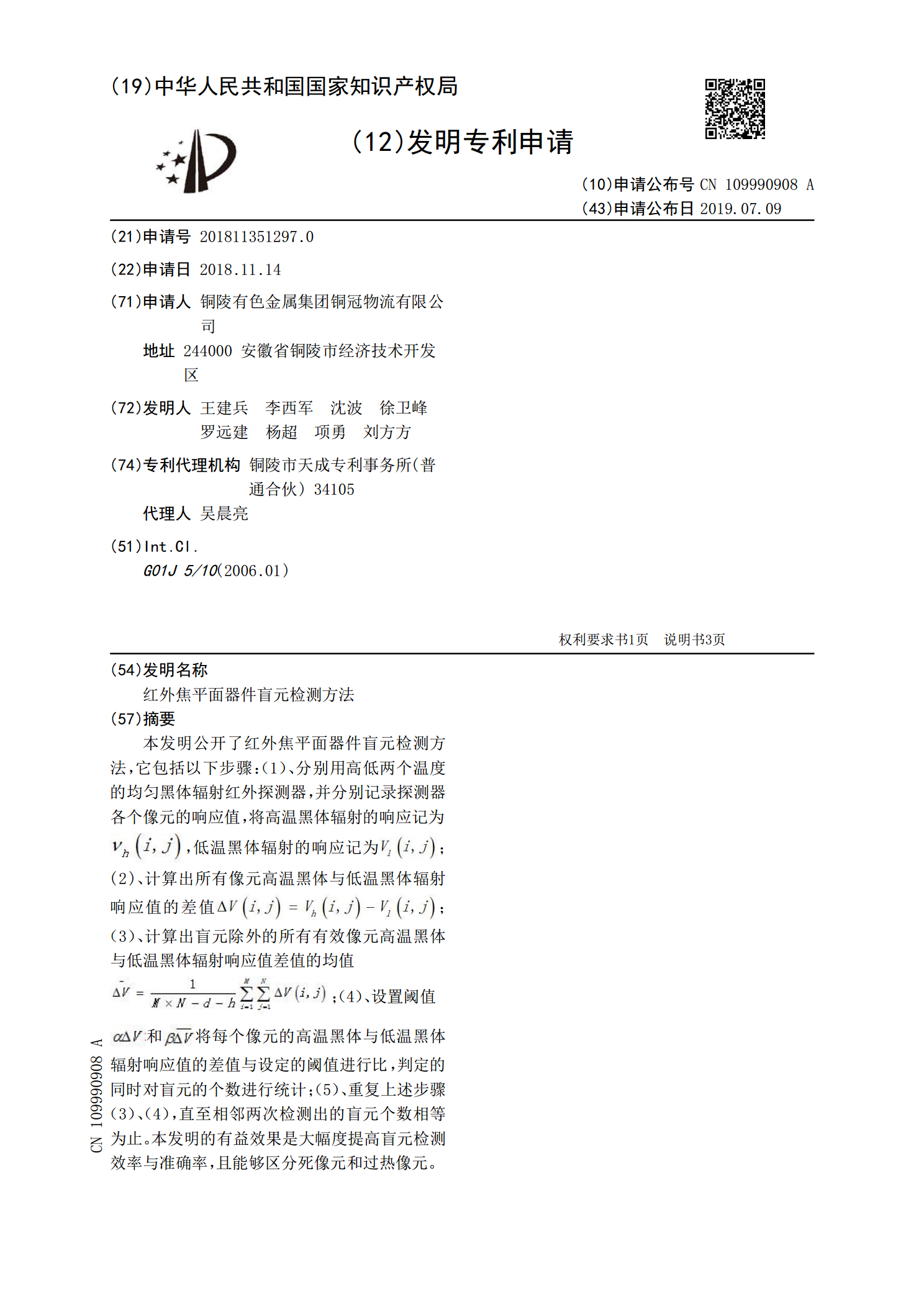
本发明公开了红外焦平面器件盲元检测方法,它包括以下步骤:(1)、分别用高低两个温度的均匀黑体辐射红外探测器,并分别记录探测器各个像元的响应值,将高温黑体辐射的响应记为
一种面阵红外焦平面的盲元检测方法.pdf
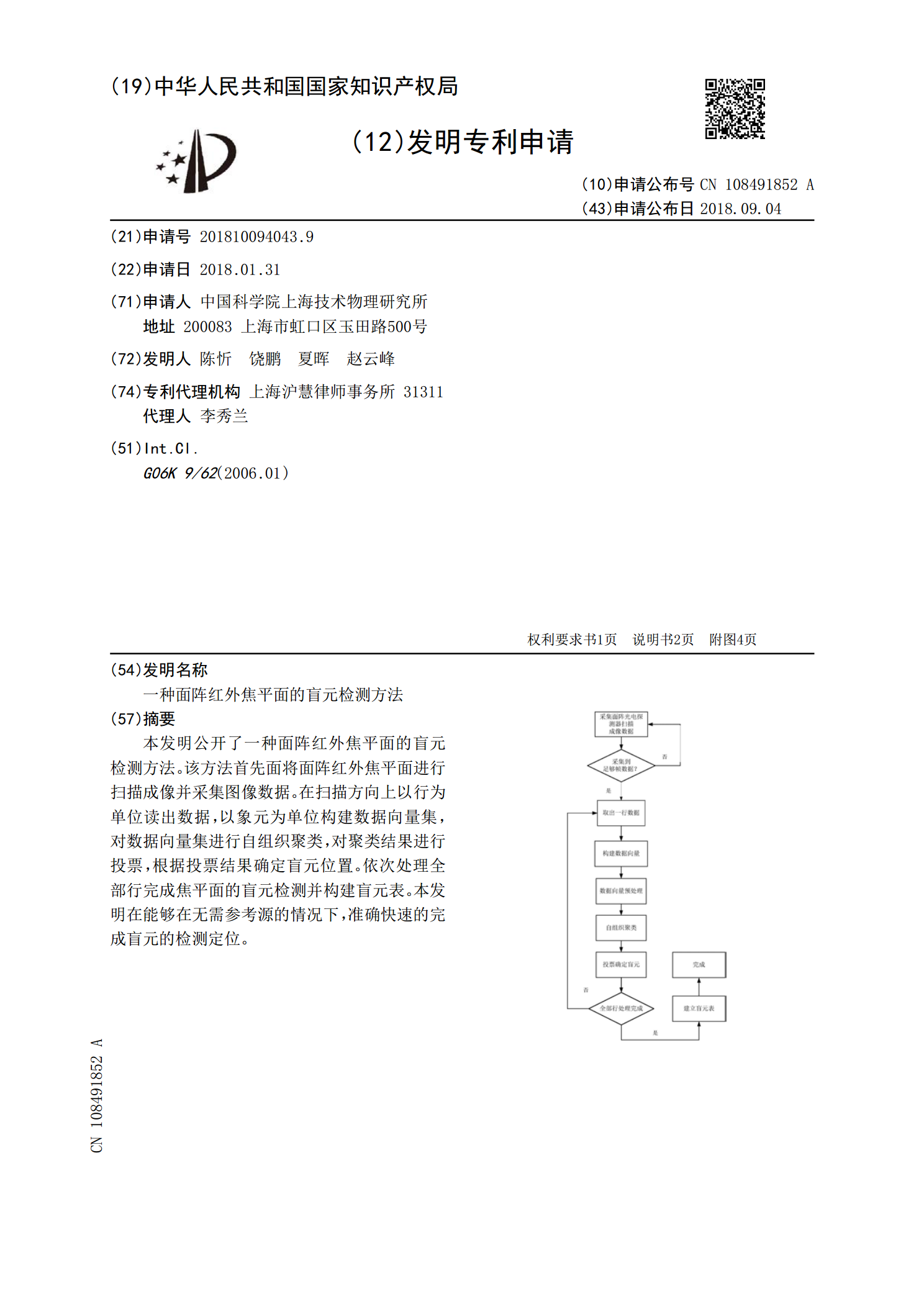
本发明公开了一种面阵红外焦平面的盲元检测方法。该方法首先面将面阵红外焦平面进行扫描成像并采集图像数据。在扫描方向上以行为单位读出数据,以象元为单位构建数据向量集,对数据向量集进行自组织聚类,对聚类结果进行投票,根据投票结果确定盲元位置。依次处理全部行完成焦平面的盲元检测并构建盲元表。本发明在能够在无需参考源的情况下,准确快速的完成盲元的检测定位。

一种适用于红外偏振焦平面的盲元检测方法.pdf
本发明公开了一种适用于红外偏振焦平面的盲元检测方法,检测方法即为构建完全盲元表,检测方法包括以下内容:构建红外盲元表;构建偏振盲元表:计算红外偏振焦平面上每个像元消光比;设置阈值c,当消光比小于阈值c时,即判断对应像元为偏振盲元,并将偏振盲元表上对应的位置置1,逐个判断每个像元从而建立红外偏振焦平面的偏振盲元表;其中,通过统计红外偏振焦平面上像元消光比的分布,以3σ准则选择c值;将红外盲元表与偏振盲元表进行或运算,即得到红外偏振焦平面的完全盲元表。解决了现有盲元检测方法无法检测出红外偏振焦平面所特有的偏振
一种红外焦平面探测器盲元筛选方法.pdf
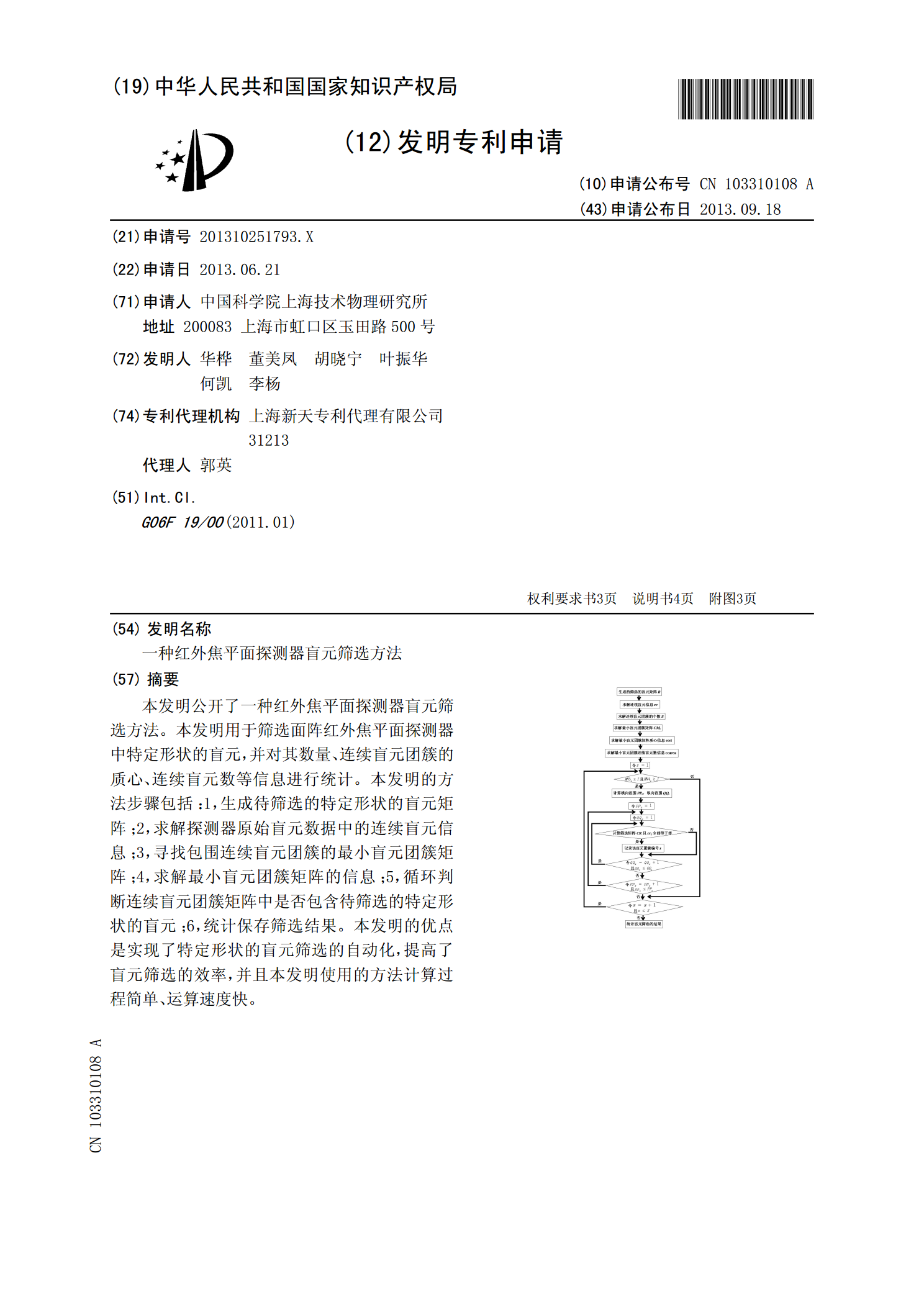
本发明公开了一种红外焦平面探测器盲元筛选方法。本发明用于筛选面阵红外焦平面探测器中特定形状的盲元,并对其数量、连续盲元团簇的质心、连续盲元数等信息进行统计。本发明的方法步骤包括:1,生成待筛选的特定形状的盲元矩阵;2,求解探测器原始盲元数据中的连续盲元信息;3,寻找包围连续盲元团簇的最小盲元团簇矩阵;4,求解最小盲元团簇矩阵的信息;5,循环判断连续盲元团簇矩阵中是否包含待筛选的特定形状的盲元;6,统计保存筛选结果。本发明的优点是实现了特定形状的盲元筛选的自动化,提高了盲元筛选的效率,并且本发明使用的方法计