
基于格林函数二维解卷积的阵不变量被动定位方法及系统.pdf

邻家****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于格林函数二维解卷积的阵不变量被动定位方法及系统.pdf
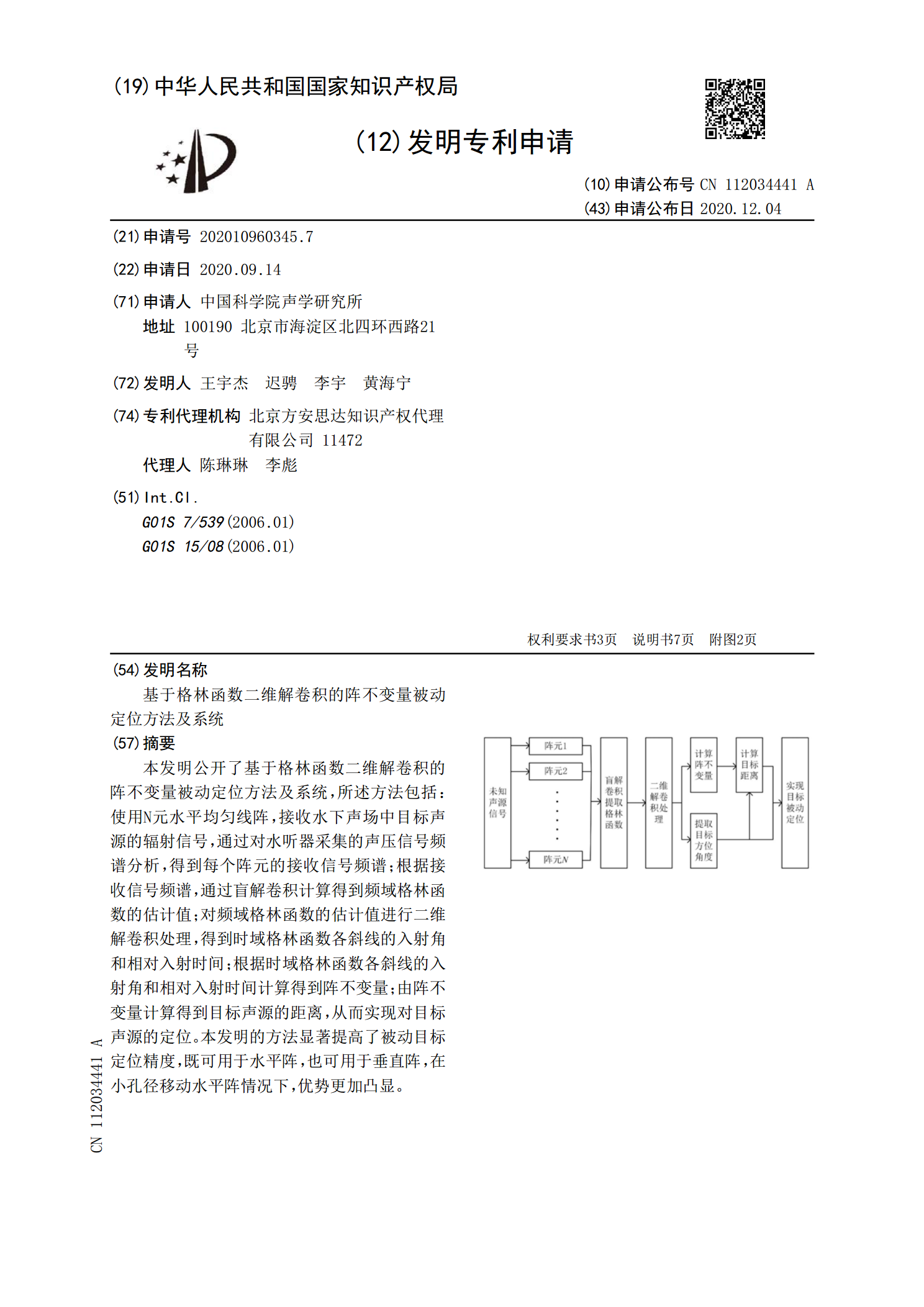
本发明公开了基于格林函数二维解卷积的阵不变量被动定位方法及系统,所述方法包括:使用N元水平均匀线阵,接收水下声场中目标声源的辐射信号,通过对水听器采集的声压信号频谱分析,得到每个阵元的接收信号频谱;根据接收信号频谱,通过盲解卷积计算得到频域格林函数的估计值;对频域格林函数的估计值进行二维解卷积处理,得到时域格林函数各斜线的入射角和相对入射时间;根据时域格林函数各斜线的入射角和相对入射时间计算得到阵不变量;由阵不变量计算得到目标声源的距离,从而实现对目标声源的定位。本发明的方法显著提高了被动目标定位精度,既

基于空域解卷积处理的浅海水平阵被动定位方法及系统.pdf
本发明公开了基于空域解卷积处理的浅海水平阵被动定位方法及系统,该方法包括:使用N元水平均匀线阵,接收水下声场中目标声源的辐射信号,通过对水听器采集的声压信号频谱分析,得到每个阵元的接收信号频谱;根据接收信号频谱,通过盲解卷积计算得到频域格林函数的估计值;对频域格林函数的估计值进行逆傅里叶变换,从得到的各阵元时域格林函数提取目标多径相对入射时间,然后通过解卷积处理方法,计算得到目标多径入射角;根据目标多径入射角计算得到阵不变量;根据阵不变量计算得到目标声源的距离,从而实现对目标声源的定位。本发明实现了浅海小

波导不变量及双阵(元)被动测距方法研究.docx
波导不变量及双阵(元)被动测距方法研究波导不变量及双阵(元)被动测距方法研究摘要:波导不变量及双阵(元)是一种被动测距方法,可以用于测量声音、光学、雷达等信号的传播和接收。其中,波导不变量是用于评估波导频带和模式的一个参数,而双阵(元)则是一种基于两个接收器之间的时差测量来计算目标位置的算法。本文将会介绍波导不变量和双阵(元)的基本原理、应用和研究进展。1.引言在现代科技的各种应用中,测距技术是一项十分重要的技术。其中,被动测距技术具有被动、无干扰、高精度等特点,被广泛应用于声学、光学、雷达等领域。本文将

小型矢量阵深海被动定位方法.docx
小型矢量阵深海被动定位方法小型矢量阵深海被动定位方法摘要:深海环境下的被动定位是一项复杂而关键的任务。本论文介绍了一种基于小型矢量阵的深海被动定位方法。该方法利用多个水声传感器构成的矢量阵,通过对深海中的声波信号进行接收,从而实现对目标的定位。具体而言,本论文将重点探讨矢量阵的设计与布局、声波信号处理算法、目标定位算法以及性能评估等方面的内容。通过实验证明,该方法能够实现较高的定位精度和可靠性,具有较好的应用前景。关键词:小型矢量阵;深海;被动定位;声波信号;目标定位1.引言深海被动定位是深海科学研究中的

一种波导不变量的被动定位方法.docx
一种波导不变量的被动定位方法随着现代科学技术的飞速发展,无线通信技术逐渐成为人们生活中不可或缺的一部分,同时,对于复杂环境下的定位技术也逐渐得到了广泛关注。波导不变量作为一种重要的无线通信定位方法,被广泛研究和应用。本文将阐述一种基于波导不变量的被动定位方法,并对其原理、方法和优势进行详细介绍和分析。一、波导不变量原理波导不变量是一种用来描述信道特征的方法。在无线通信时,信号可能会受到多种因素的影响,如反射、干扰等,导致信号传输路径复杂和时延变化。我们可以通过测量信号的传输路径,获得反射系数和时延,进而确