
一种汽车盲区检测报警方法及系统.pdf

新槐****公主

1/10

2/10

3/10

4/10
5/10

6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种汽车盲区检测报警方法及系统.pdf
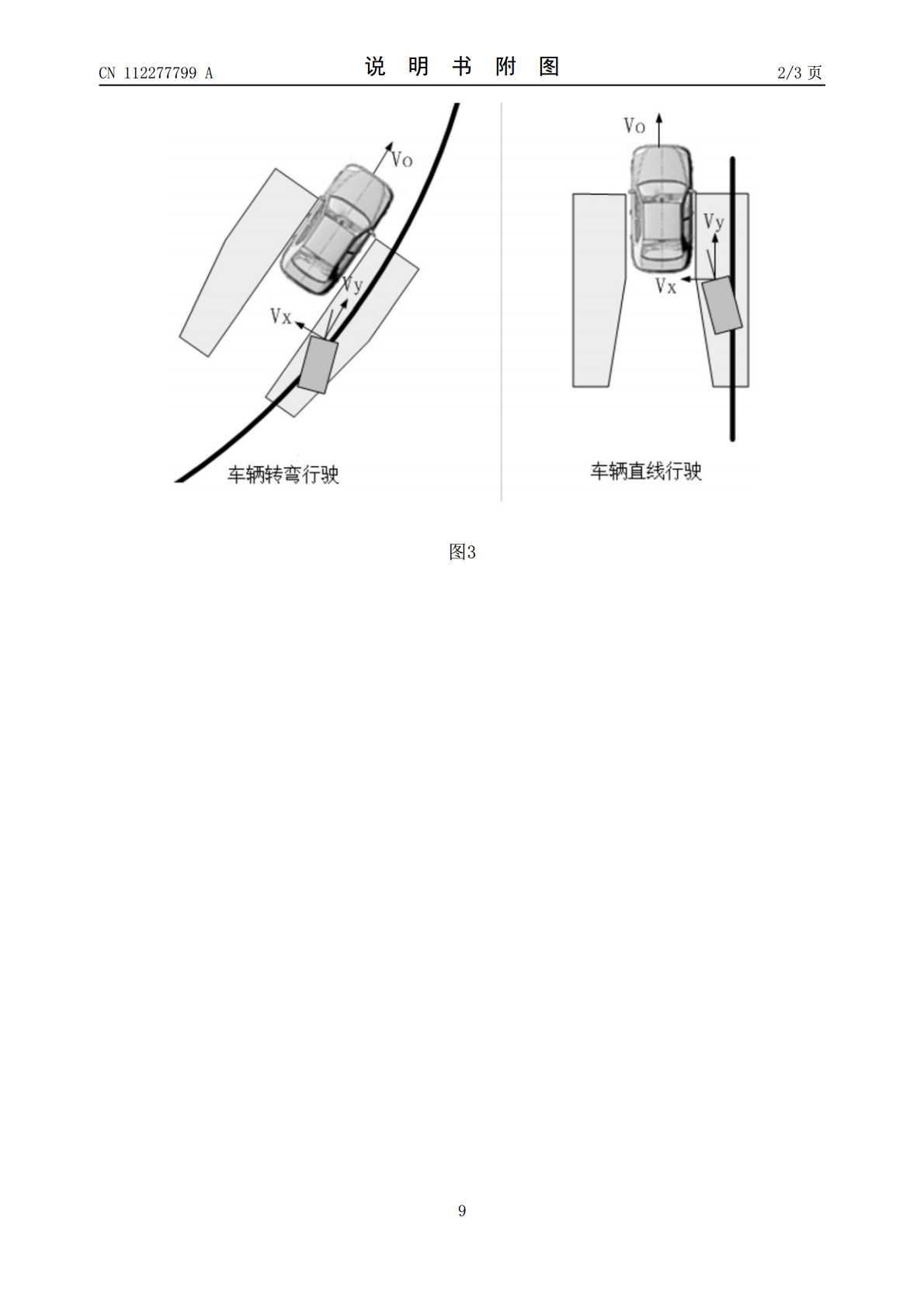
本发明公开了一种汽车盲区检测报警方法及系统,该方法包括:S1、根据车辆行驶的车速Vo、方向盘转角、横摆角速度,判断车辆行驶模式,然后执行S2;S2、根据车辆行驶模式和车辆行驶的车速Vo,确定报警区域,然后执行S3;S3、判断是否有目标进入报警区域,如果是,则执行S4,否则结束;S4、判断目标是否有历史跟踪轨迹,如果是,则执行S6,否则执行S5;S5、判断目标是否满足二次筛选条件,如果是,则执行S6,否则返回执行S3;S6、判断目标在报警区域持续时间是否超过预设的第一时间阈值,如果是,则进行目标报警,然后结

汽车盲区报警系统及方法.pdf
本发明公开了汽车盲区报警系统及其方法,包括超声波传感器、A/D转换器、摄像头、单片机控制电路、蜂鸣器、视频解码电路和液晶显示屏;所述的超声波传感器通过A/D转换器与单片机控制电路相连,摄像头的输出端接至单片机控制电路,所述单片机的控制端分别连接蜂鸣器和视频解码电路,所述视频解码电路的输出端则接至液晶显示屏。由于本发明采用超声波传感器,可以准确地判断盲区是否存在汽车,另外有摄像头进行监测,提高了监测的效果,方便驾驶员观察路况情况,便于控制。

一种汽车盲区监测报警提示方法及系统.pdf
本发明公开了一种汽车盲区监测报警提示方法及系统,包括主控单元、相互独立设置的左报警提示音单元及右报警提示音单元,其中,左报警提示音单元设置于车内左侧来提供左方位的提示音,右报警提示音单元设置于车内右侧来提供右方位的提示音,主控单元监测车辆左侧、右侧的危险状况,并以此分别控制左报警提示音单元、右报警提示音单元进行声音报警提示,驾驶员以不同的声音方位来直观判断车辆侧部的危险状况。本发明汽车盲区监测报警提示方法及系统通过创新设计,使得汽车盲区监测系统的功用性大幅提高,具有非常积极的意义。
一种基于车辆盲区检测系统的汽车盲区检测方法.pdf
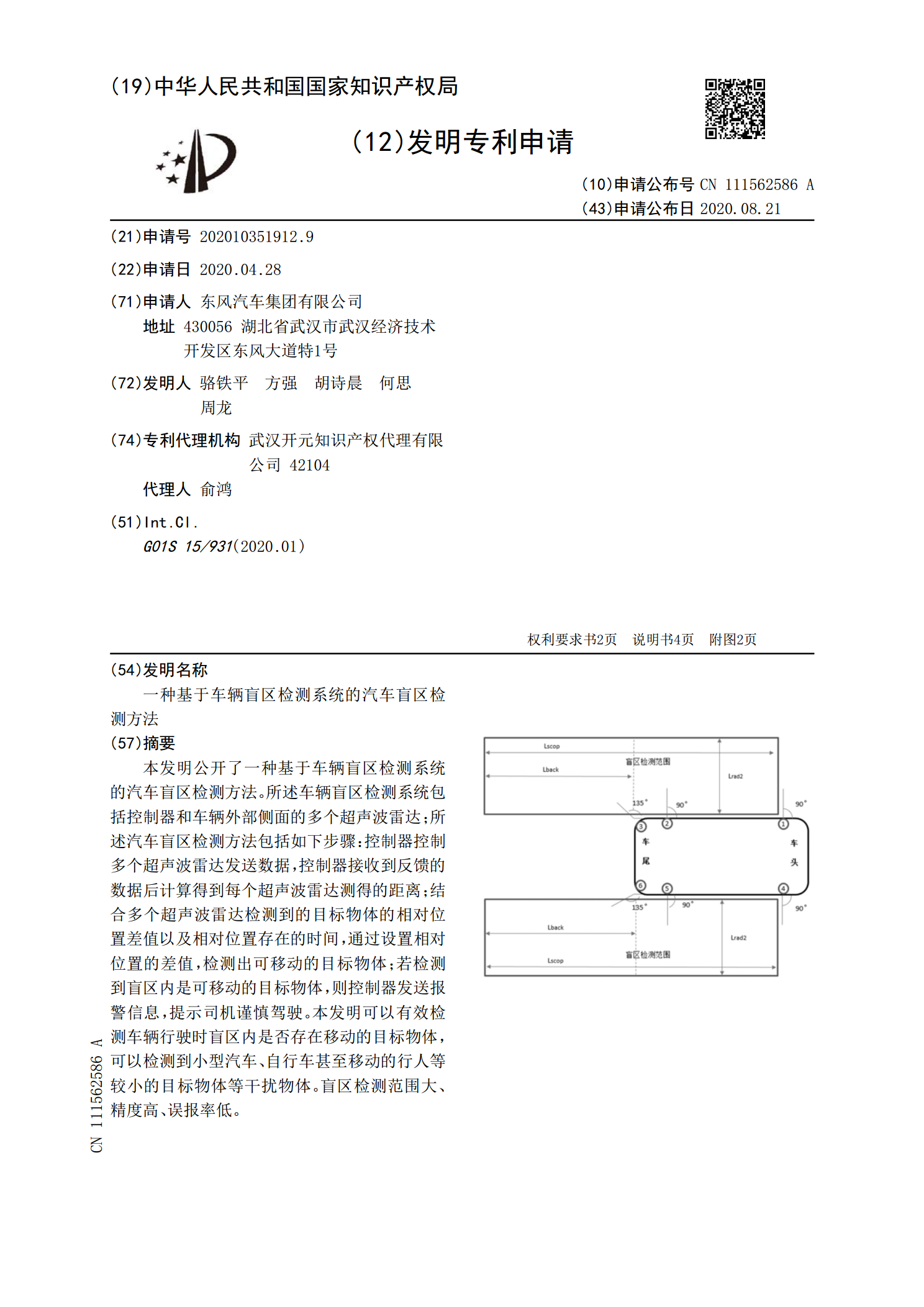
本发明公开了一种基于车辆盲区检测系统的汽车盲区检测方法。所述车辆盲区检测系统包括控制器和车辆外部侧面的多个超声波雷达;所述汽车盲区检测方法包括如下步骤:控制器控制多个超声波雷达发送数据,控制器接收到反馈的数据后计算得到每个超声波雷达测得的距离;结合多个超声波雷达检测到的目标物体的相对位置差值以及相对位置存在的时间,通过设置相对位置的差值,检测出可移动的目标物体;若检测到盲区内是可移动的目标物体,则控制器发送报警信息,提示司机谨慎驾驶。本发明可以有效检测车辆行驶时盲区内是否存在移动的目标物体,可以检测到小型
汽车视觉盲区报警系统.pdf
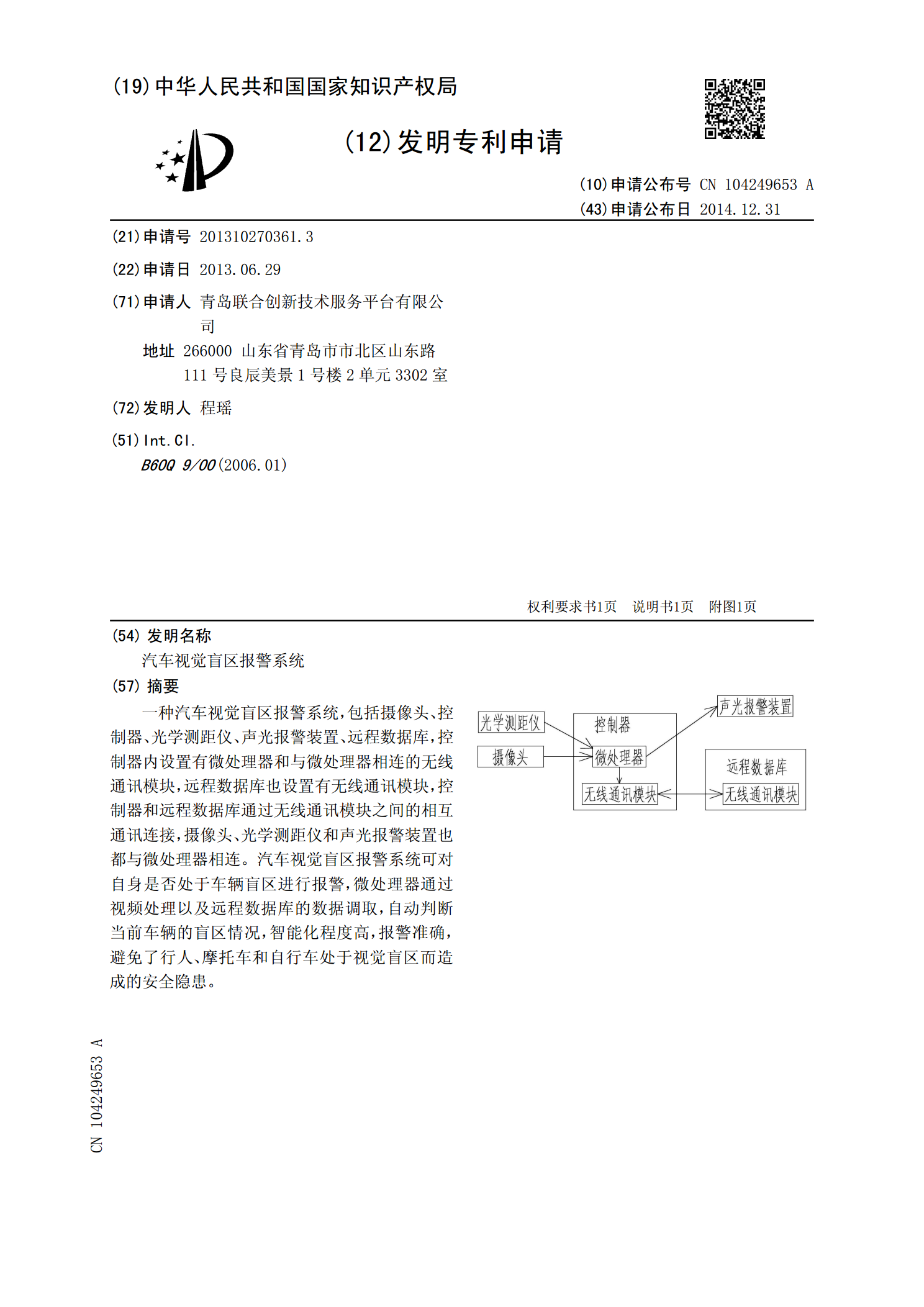
一种汽车视觉盲区报警系统,包括摄像头、控制器、光学测距仪、声光报警装置、远程数据库,控制器内设置有微处理器和与微处理器相连的无线通讯模块,远程数据库也设置有无线通讯模块,控制器和远程数据库通过无线通讯模块之间的相互通讯连接,摄像头、光学测距仪和声光报警装置也都与微处理器相连。汽车视觉盲区报警系统可对自身是否处于车辆盲区进行报警,微处理器通过视频处理以及远程数据库的数据调取,自动判断当前车辆的盲区情况,智能化程度高,报警准确,避免了行人、摩托车和自行车处于视觉盲区而造成的安全隐患。