
一种导盲方法、导盲装置、终端设备及可读存储介质.pdf

一吃****昕靓

1/10
2/10
3/10
4/10
5/10
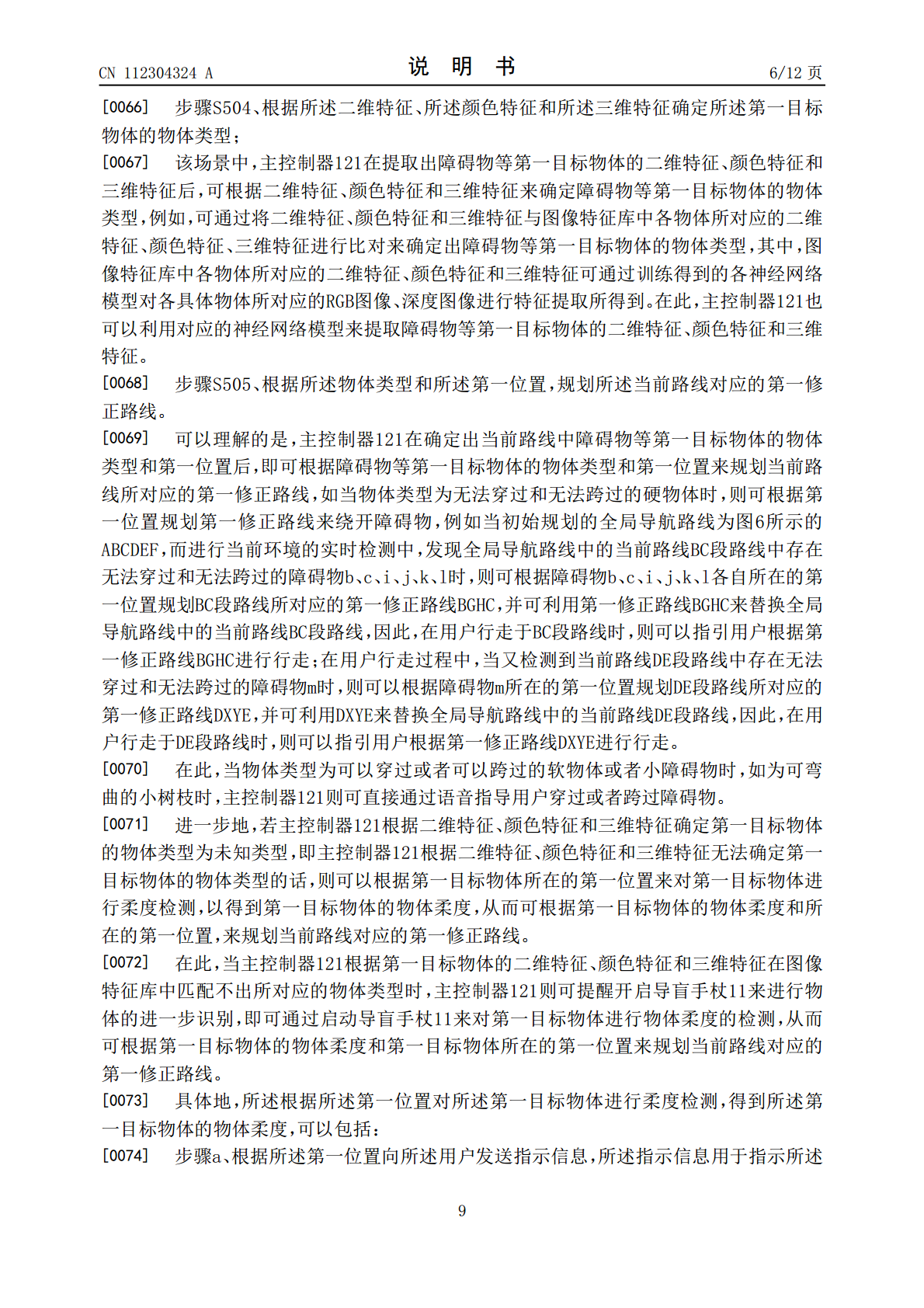
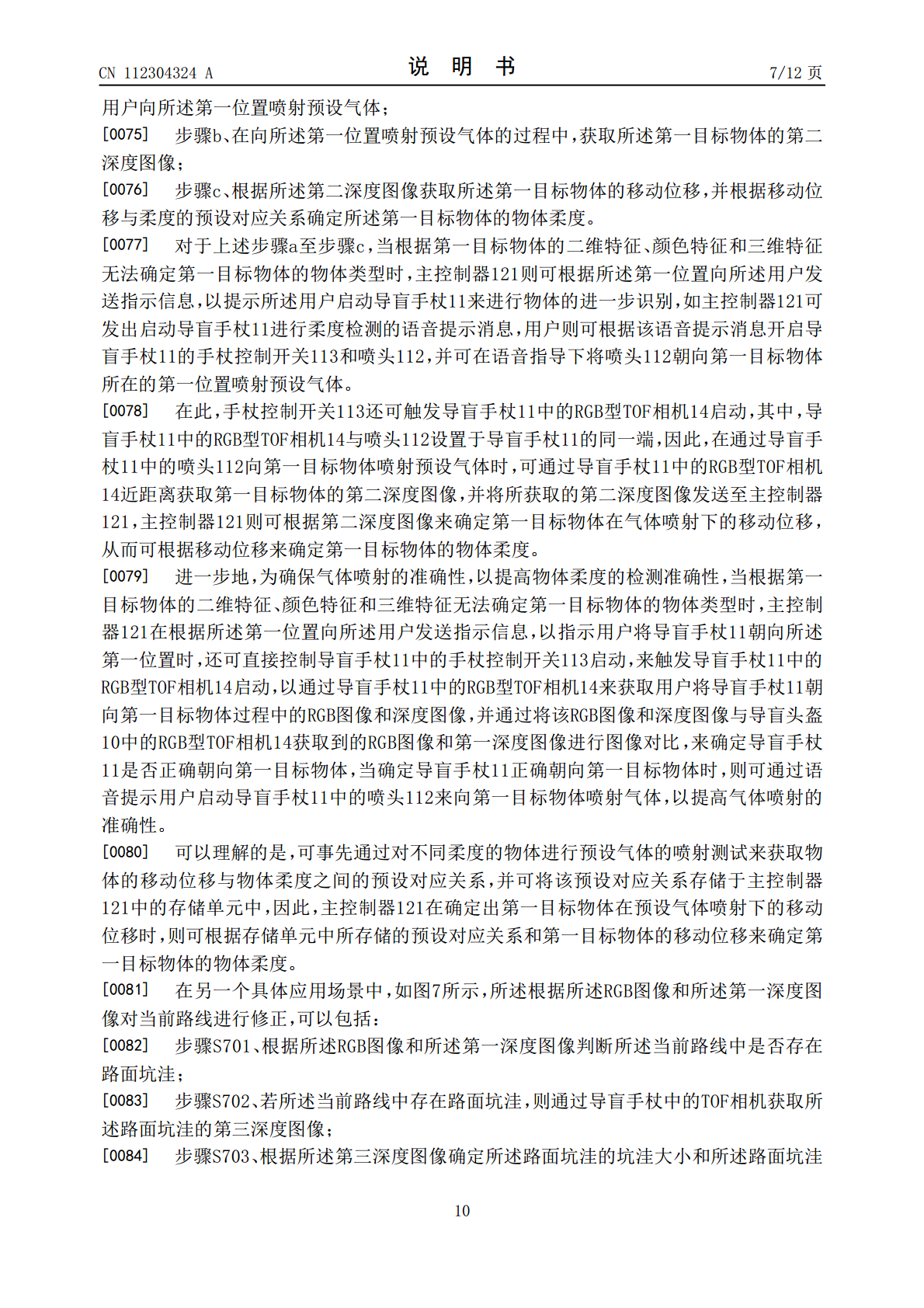
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种导盲方法、导盲装置、终端设备及可读存储介质.pdf
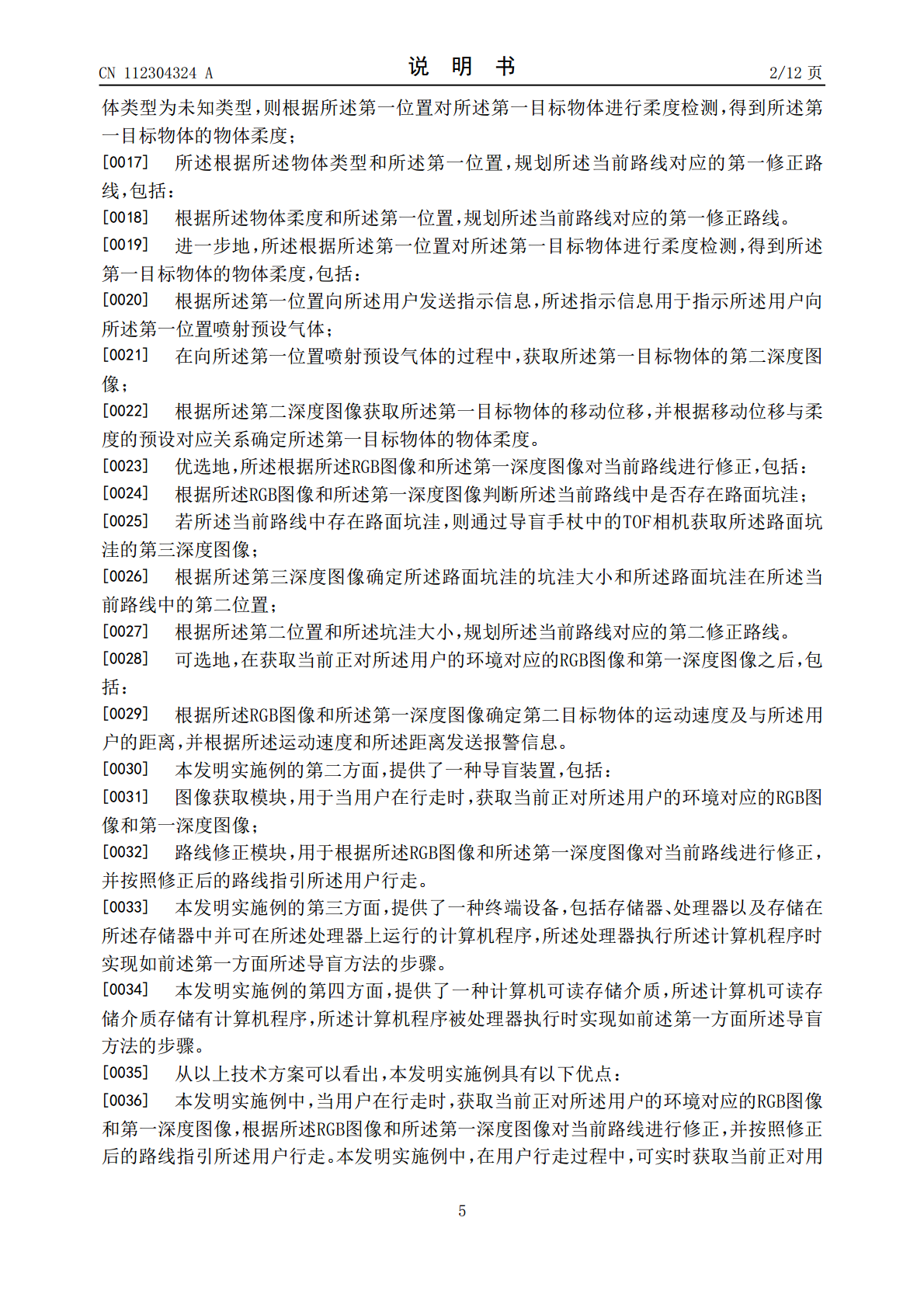
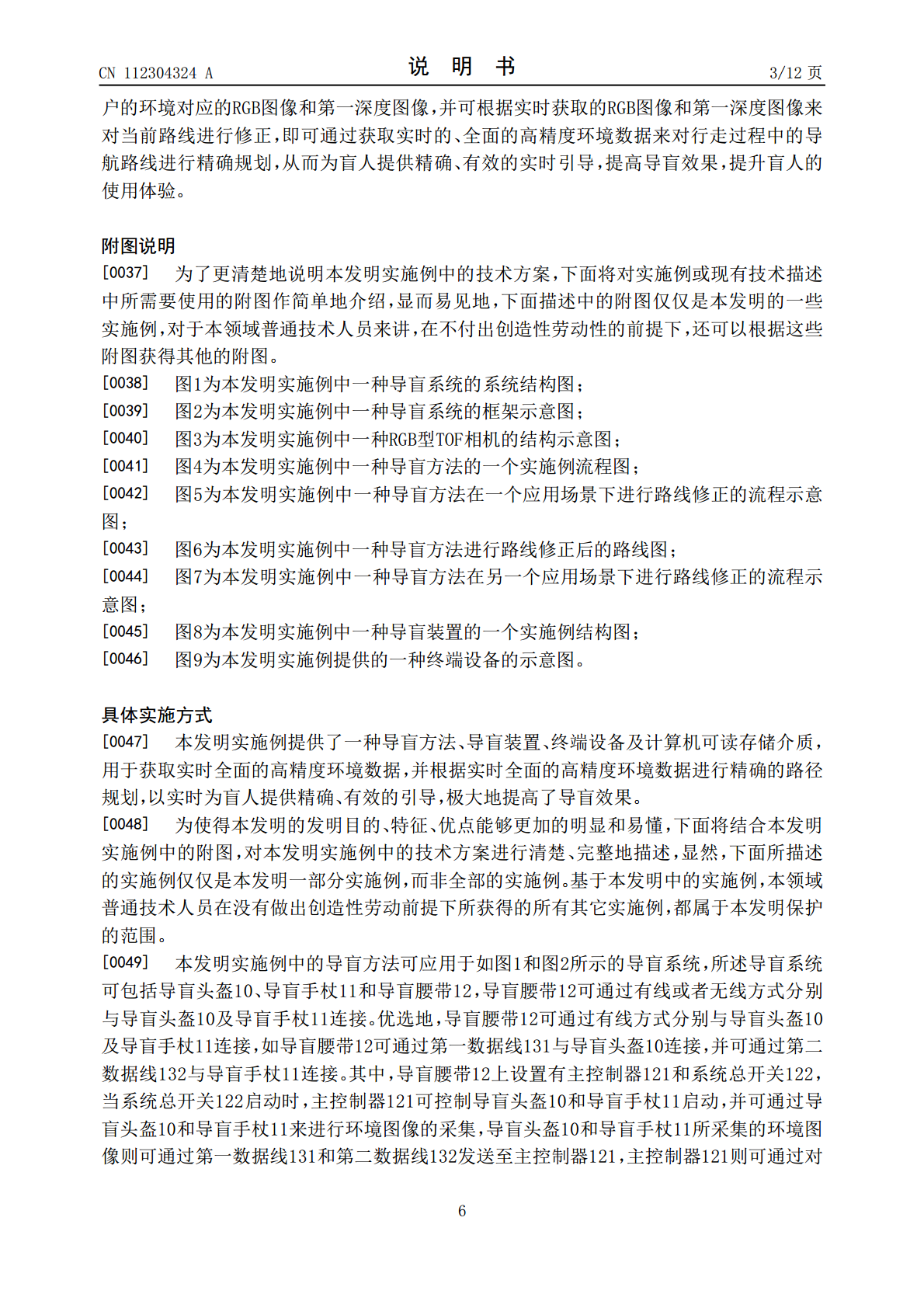
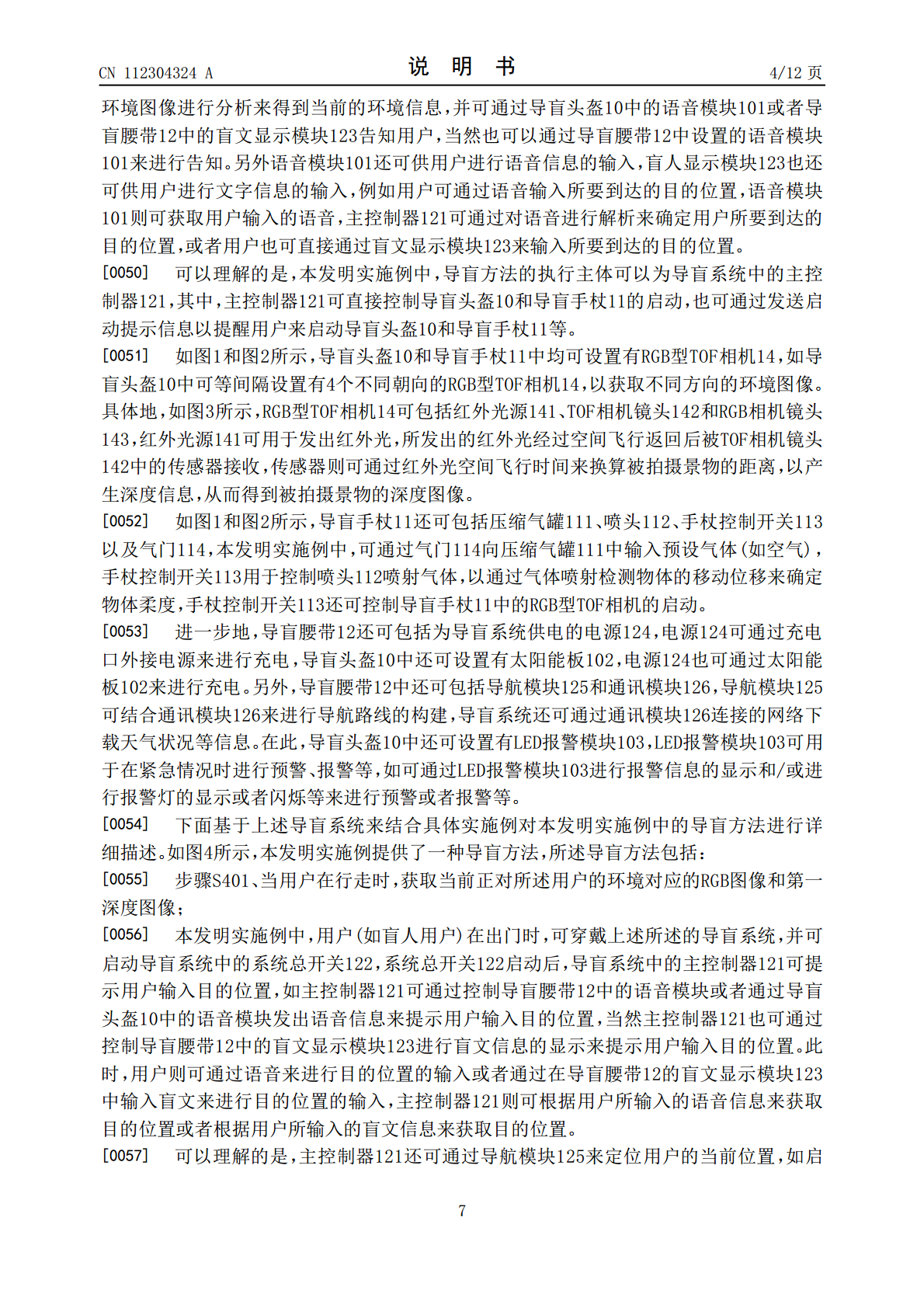
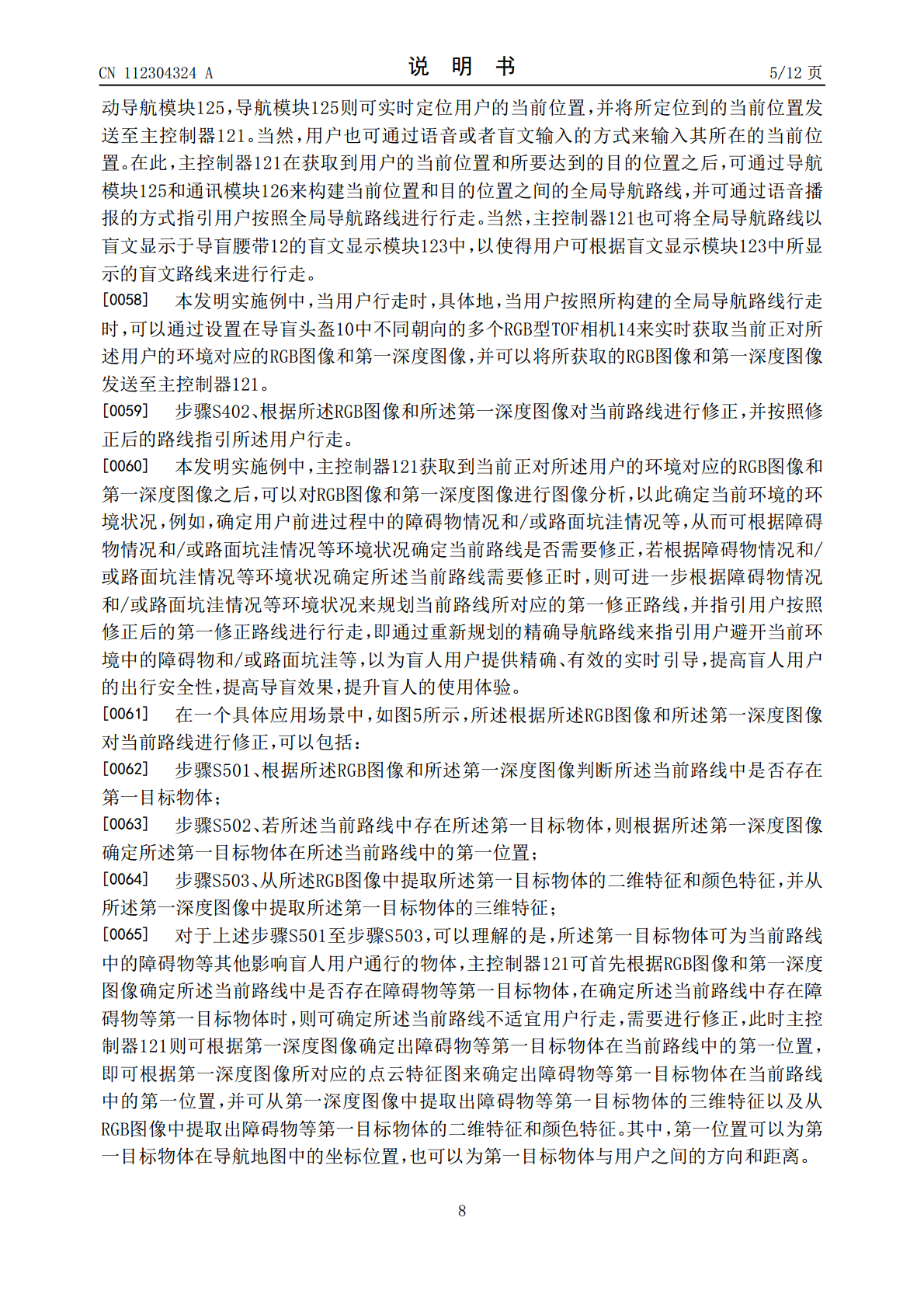
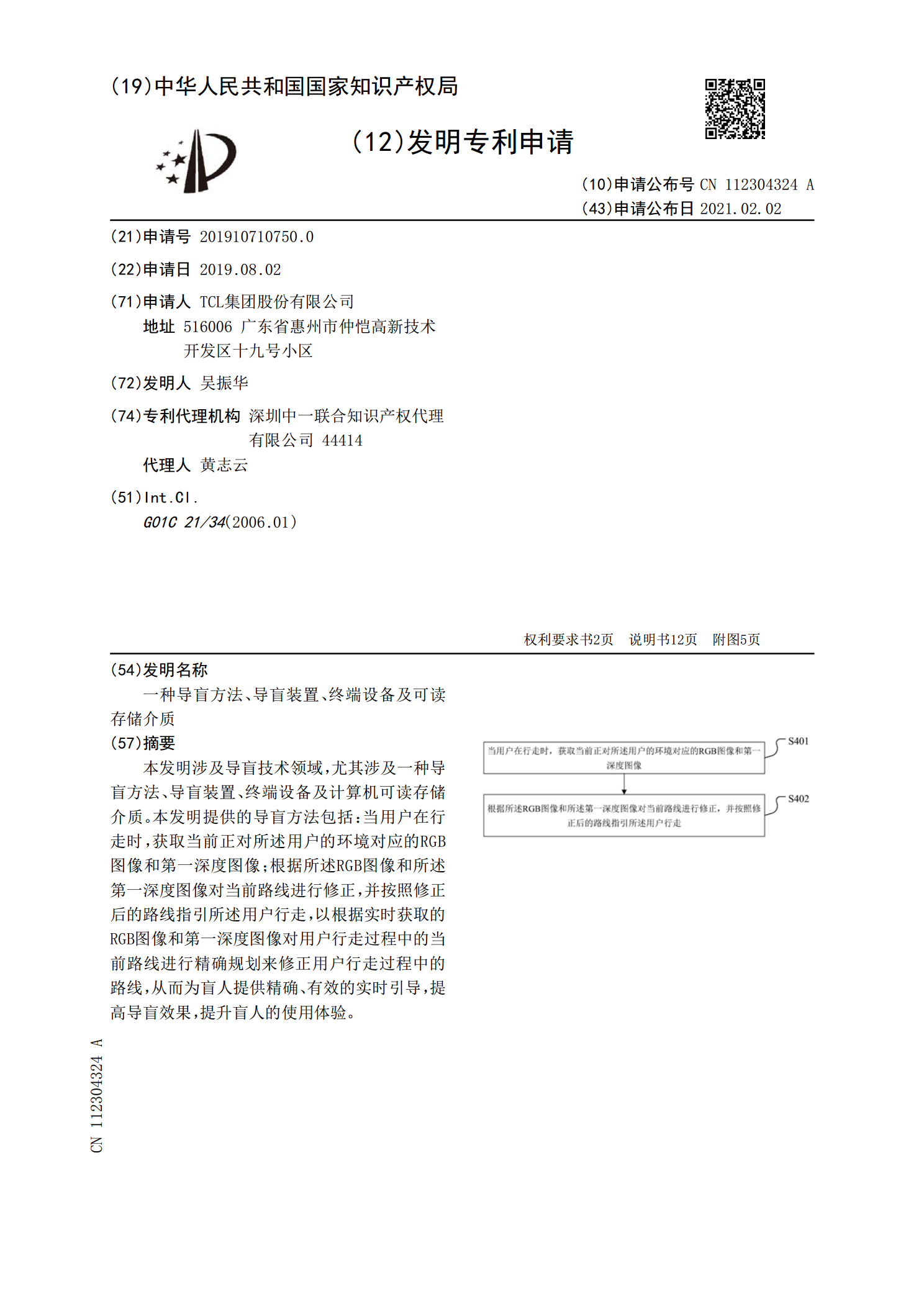
本发明涉及导盲技术领域,尤其涉及一种导盲方法、导盲装置、终端设备及计算机可读存储介质。本发明提供的导盲方法包括:当用户在行走时,获取当前正对所述用户的环境对应的RGB图像和第一深度图像;根据所述RGB图像和所述第一深度图像对当前路线进行修正,并按照修正后的路线指引所述用户行走,以根据实时获取的RGB图像和第一深度图像对用户行走过程中的当前路线进行精确规划来修正用户行走过程中的路线,从而为盲人提供精确、有效的实时引导,提高导盲效果,提升盲人的使用体验。
导盲方法、导盲装置、导盲设备及计算机可读存储介质.pdf
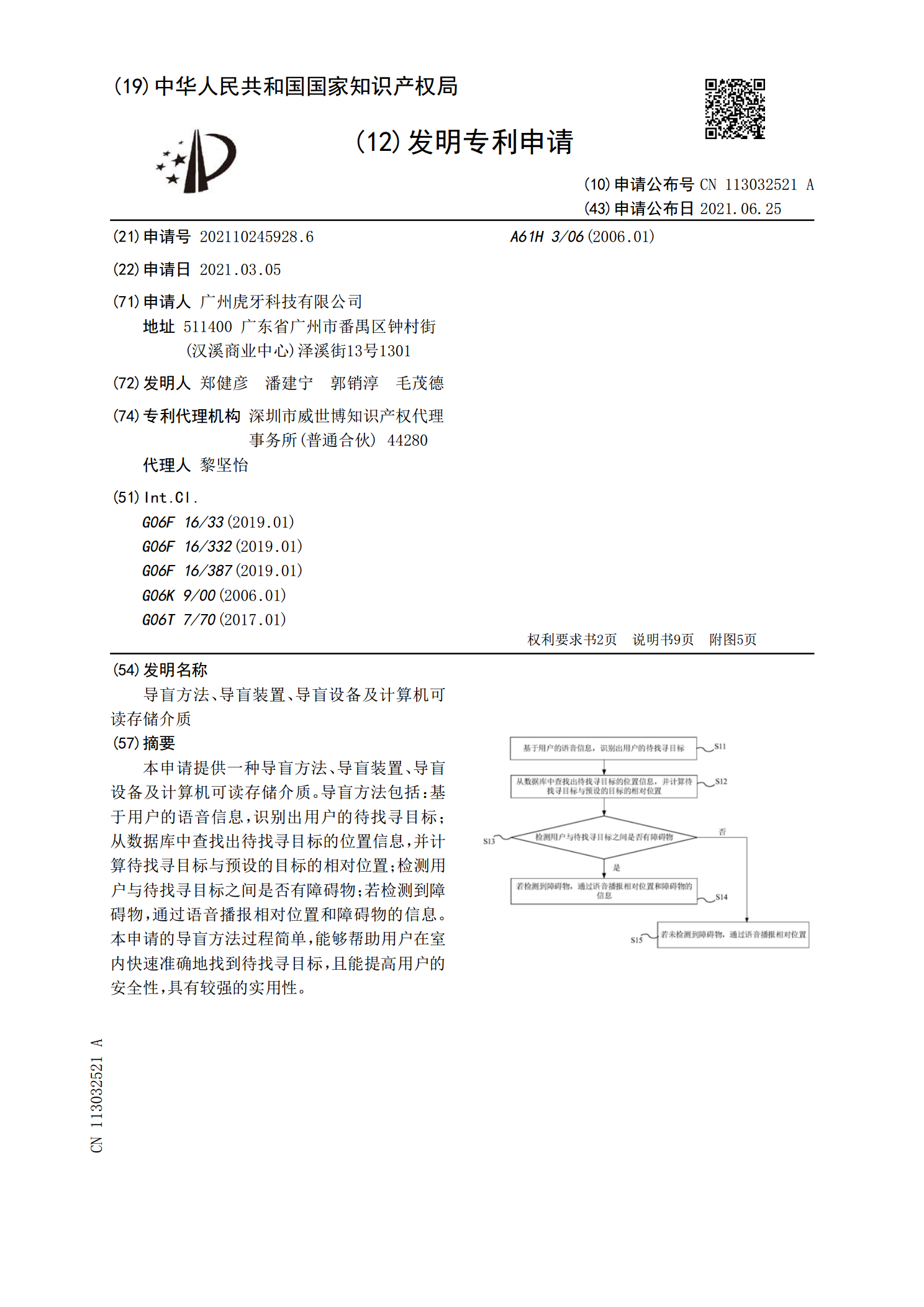
本申请提供一种导盲方法、导盲装置、导盲设备及计算机可读存储介质。导盲方法包括:基于用户的语音信息,识别出用户的待找寻目标;从数据库中查找出待找寻目标的位置信息,并计算待找寻目标与预设的目标的相对位置;检测用户与待找寻目标之间是否有障碍物;若检测到障碍物,通过语音播报相对位置和障碍物的信息。本申请的导盲方法过程简单,能够帮助用户在室内快速准确地找到待找寻目标,且能提高用户的安全性,具有较强的实用性。
导盲方法、装置及可读存储介质.pdf
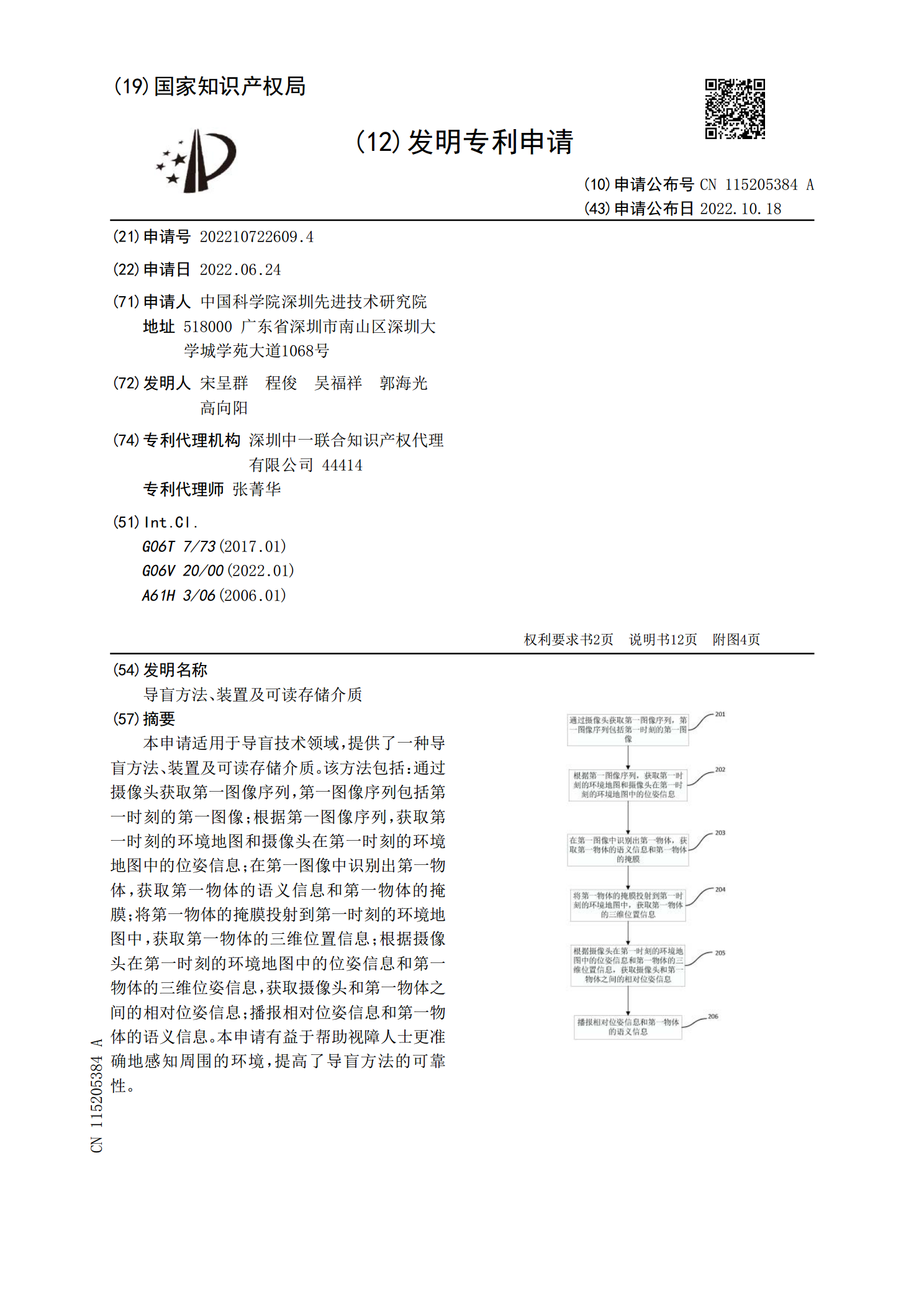
本申请适用于导盲技术领域,提供了一种导盲方法、装置及可读存储介质。该方法包括:通过摄像头获取第一图像序列,第一图像序列包括第一时刻的第一图像;根据第一图像序列,获取第一时刻的环境地图和摄像头在第一时刻的环境地图中的位姿信息;在第一图像中识别出第一物体,获取第一物体的语义信息和第一物体的掩膜;将第一物体的掩膜投射到第一时刻的环境地图中,获取第一物体的三维位置信息;根据摄像头在第一时刻的环境地图中的位姿信息和第一物体的三维位姿信息,获取摄像头和第一物体之间的相对位姿信息;播报相对位姿信息和第一物体的语义信息。

导盲方法、装置、导盲设备及存储介质.pdf
本发明实施例公开了一种导盲方法、装置、导盲设备及存储介质。本申请涉及导盲技术领域,该方法包括:接收预设导盲开始指令;监听盲人的语音信息,从语音信息中获取目标地址;获取盲人所处的环境图像信息及周围被探测物体的位置信息;根据环境图像信息及被探测物体的位置信息计算出盲人所处的当前路况信息;根据目标地址及当前路况信息形成预设控制指令,基于预设控制指令向盲人播报导盲提示信息以对盲人进行导盲。本申请实施例通过获取环境图像信息及被探测物体的位置信息计算出盲人所处的当前路况信息,根据当前路况信息及获取的目标地址形成预设控

导盲信息的确定方法、装置、导盲终端及存储介质.pdf
本发明公开了导盲信息的确定方法、装置、导盲终端及存储介质。所述方法包括:监测到导盲终端处于运动状态时,基于所述导盲终端的摄像头捕获当前道路的实景图像;根据对所述实景图像的识别结果,确定所述导盲终端中超声测距装置在当前道路环境中的待测距对象;根据对所述待测距对象的距离测量数据,生成行走所需的导盲行走信息。利用该方法,能够实现实时、准确的捕获当前道路的实景图像,并基于捕获的当前道路的实景图像,能够有针对性的确定待测距对象,进而提供适应于用户所处环境的导盲行走信息,极大的提高了用户体验。