
一种抗长时遮挡的低慢小目标跟踪装置及方法.pdf

努力****亚捷

1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种抗长时遮挡的低慢小目标跟踪装置及方法.pdf
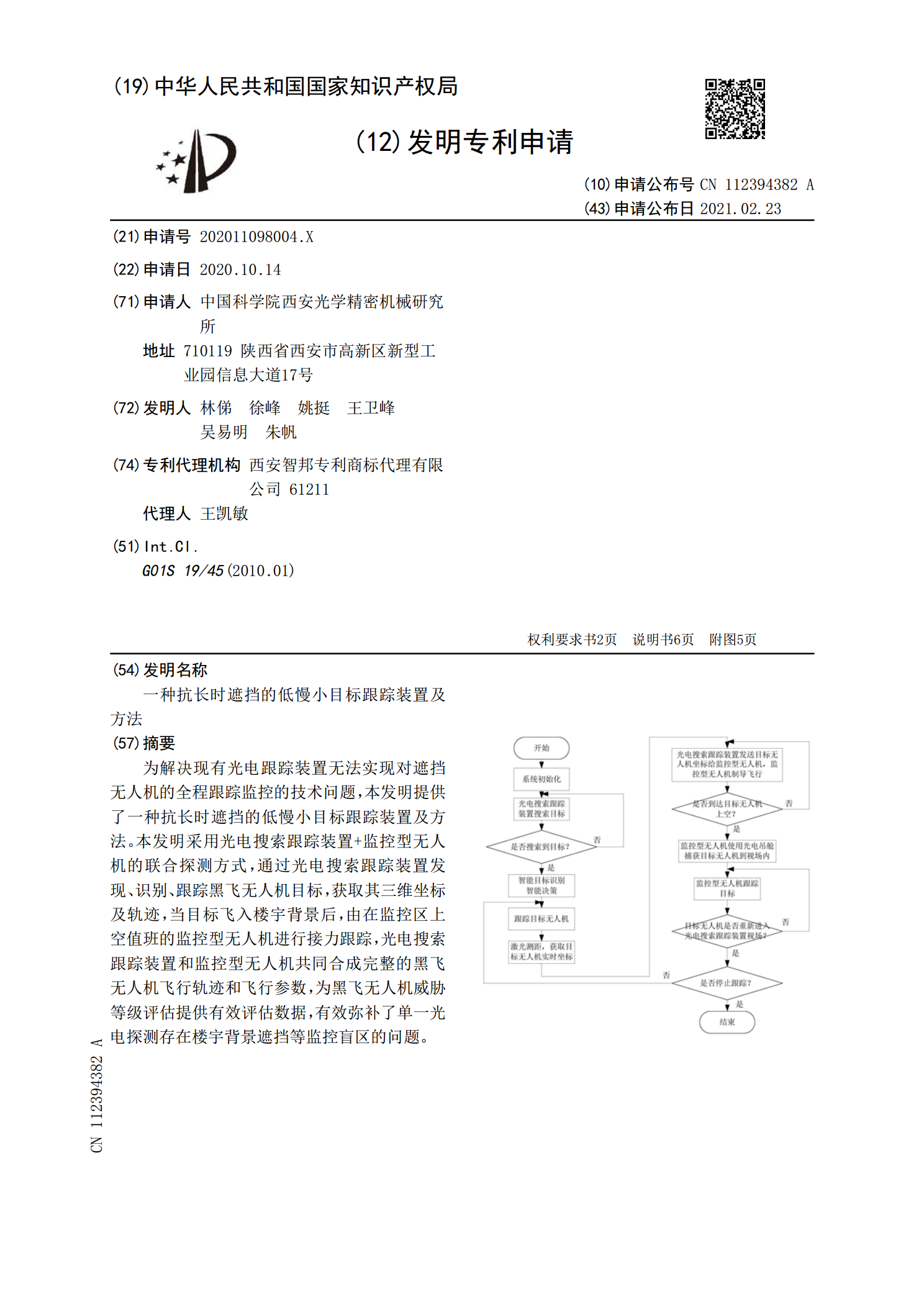
为解决现有光电跟踪装置无法实现对遮挡无人机的全程跟踪监控的技术问题,本发明提供了一种抗长时遮挡的低慢小目标跟踪装置及方法。本发明采用光电搜索跟踪装置+监控型无人机的联合探测方式,通过光电搜索跟踪装置发现、识别、跟踪黑飞无人机目标,获取其三维坐标及轨迹,当目标飞入楼宇背景后,由在监控区上空值班的监控型无人机进行接力跟踪,光电搜索跟踪装置和监控型无人机共同合成完整的黑飞无人机飞行轨迹和飞行参数,为黑飞无人机威胁等级评估提供有效评估数据,有效弥补了单一光电探测存在楼宇背景遮挡等监控盲区的问题。

一种抗遮挡目标跟踪方法.pdf
本发明提供一种抗遮挡目标跟踪方法,首先对于输入视频或图像序列,采用目标检测器对视频中的每一帧图像进行检测得到基于检测的候选项;根据输出当前帧的目标检测结果,运用卡尔曼滤波器预测目标在下一帧的位置得到基于跟踪的候选项。根据置信度评分公式计算候选项的置信度,采用非极大值抑制算法得到最终候选项;将相邻帧的候选项输入特征匹配网络,通过级联匹配算法计算目标间的匹配度。将基于检测的候选项通过深度神经网络进行特征提取,进行特征间相似度的匹配;基于跟踪的候选项进行IOU重合度匹配。根据相邻帧的目标匹配结果确定目标在当前帧

一种抗遮挡目标跟踪方法及系统.pdf
本发明提供一种抗遮挡目标跟踪方法及系统,该方法包括:对上一帧图像中跟踪目标的区域进行特征提取,得到第一特征属性;将第一滤波模板和上一帧图像进行卷积操作,得到第一图像响应图;根据第一特征属性,对第一滤波模板进行更新,得到第二滤波模板,并将第二滤波模板和当前帧图像进行卷积操作,得到第二图像响应图;根据第一图像响应图对应的响应值和第二图像响应图对应的响应值,获取响应变化置信度和响应梯度置信度;根据预设置信度阈值,对响应变化置信度和响应梯度置信度进行判断,确定当前帧图像中跟踪目标的遮挡状态和对应的跟踪策略。本发明

一种抗遮挡抗干扰的目标检测跟踪方法研究.docx
一种抗遮挡抗干扰的目标检测跟踪方法研究随着计算机视觉技术的发展,目标检测和跟踪成为了很多领域的研究热点,例如自动驾驶、智能监控等。但是,在实际应用中,目标会被其它物体或者遮挡物遮挡,同时受到光线强度和角度的影响,导致存在很多的干扰因素,对目标检测和跟踪造成很大的困难。因此,如何提高检测和跟踪的精度和鲁棒性,减少干扰因素的影响,成为了一个值得研究的重要问题。本文提出了一种新的抗遮挡抗干扰的目标检测跟踪方法,在处理复杂场景的目标检测和跟踪中具有很好的效果。该方法主要分为两个部分,其一是针对目标检测的改进,其二
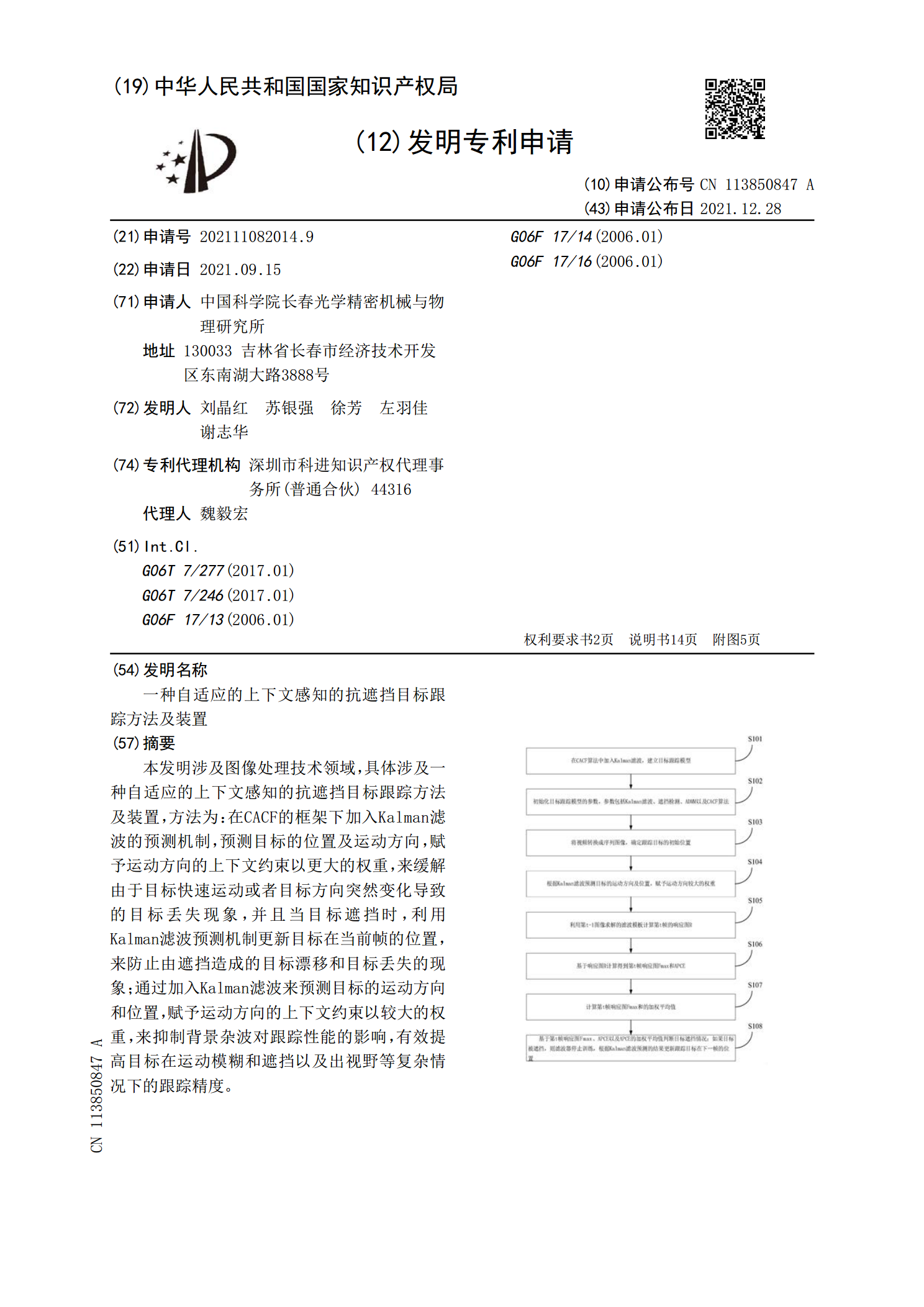
一种自适应的上下文感知的抗遮挡目标跟踪方法及装置.pdf
本发明涉及图像处理技术领域,具体涉及一种自适应的上下文感知的抗遮挡目标跟踪方法及装置,方法为:在CACF的框架下加入Kalman滤波的预测机制,预测目标的位置及运动方向,赋予运动方向的上下文约束以更大的权重,来缓解由于目标快速运动或者目标方向突然变化导致的目标丢失现象,并且当目标遮挡时,利用Kalman滤波预测机制更新目标在当前帧的位置,来防止由遮挡造成的目标漂移和目标丢失的现象;通过加入Kalman滤波来预测目标的运动方向和位置,赋予运动方向的上下文约束以较大的权重,来抑制背景杂波对跟踪性能的影响,有效