
红外探测器盲元实时检测与消除方法.pdf

是你****深呀

1/10
2/10

3/10
4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

红外探测器盲元实时检测与消除方法.pdf
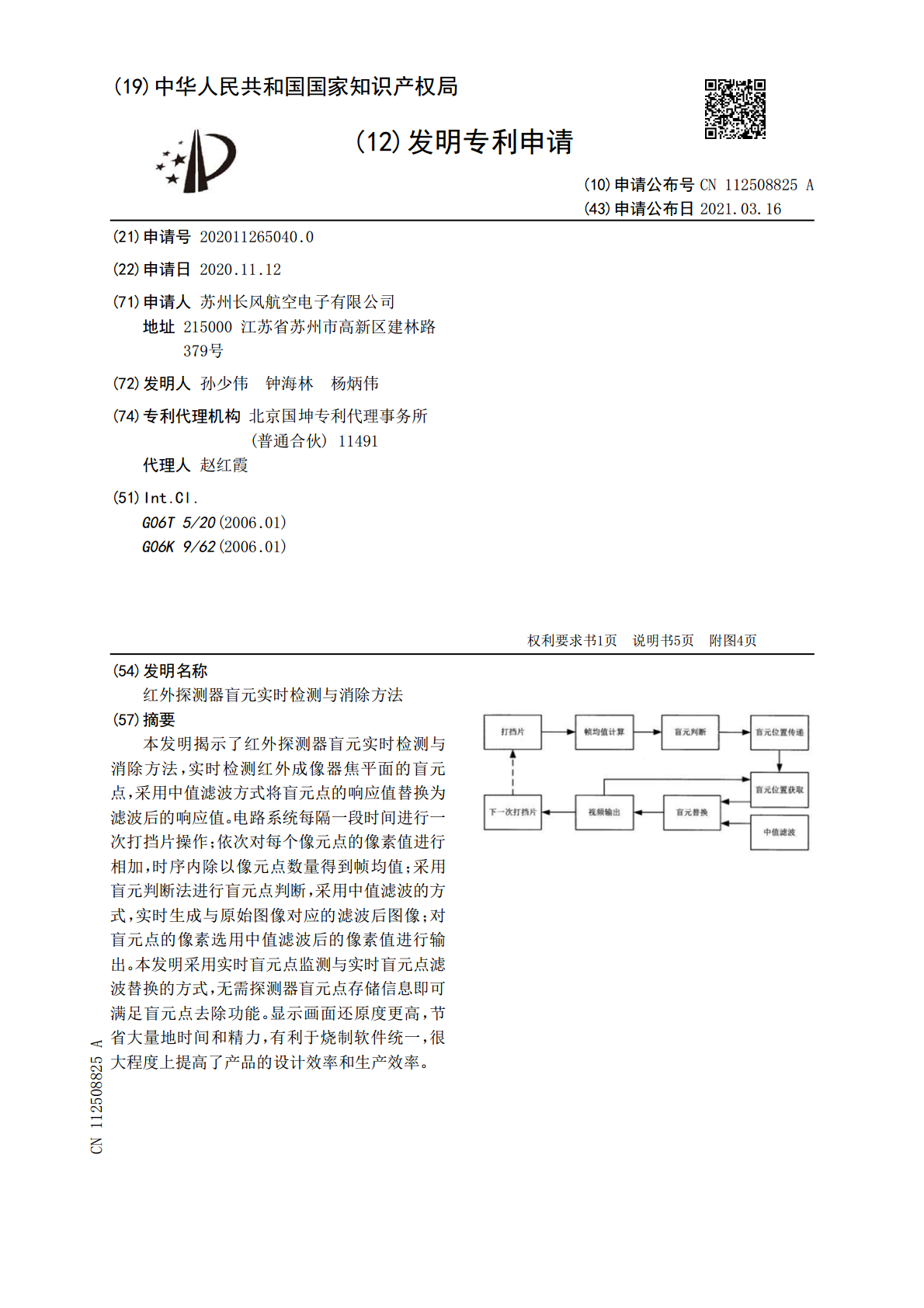
本发明揭示了红外探测器盲元实时检测与消除方法,实时检测红外成像器焦平面的盲元点,采用中值滤波方式将盲元点的响应值替换为滤波后的响应值。电路系统每隔一段时间进行一次打挡片操作;依次对每个像元点的像素值进行相加,时序内除以像元点数量得到帧均值;采用盲元判断法进行盲元点判断,采用中值滤波的方式,实时生成与原始图像对应的滤波后图像;对盲元点的像素选用中值滤波后的像素值进行输出。本发明采用实时盲元点监测与实时盲元点滤波替换的方式,无需探测器盲元点存储信息即可满足盲元点去除功能。显示画面还原度更高,节省大量地时间和精

一种数字TDI红外探测器的实时盲元检测方法.pdf
本发明公开了一种数字TDI红外探测器的实时盲元检测方法。该方法对数字TDI红外探测器工作时的图像进行实时采集,将当前帧的图像数据按象元顺序与前一帧缓存器的图像数据、特征缓存器中的特征数据进行比较累加,计算新的象元统计特征。当统计到一定程度的象元统计特征后,在扫描方向以行为单位读出象元特征并进行判决,每一次的判决结果累加到盲元概率表中。利用盲元概率表计算TDI累加权重,通过TDI累加权重实时去除盲元在TDI累加过程中的影响,完成盲元补偿。本发明在不打断TDI成像工作状态,无需额外辅助设备的情况下,准确实时的
一种实时红外探测器盲元检测提取及校正的方法.pdf
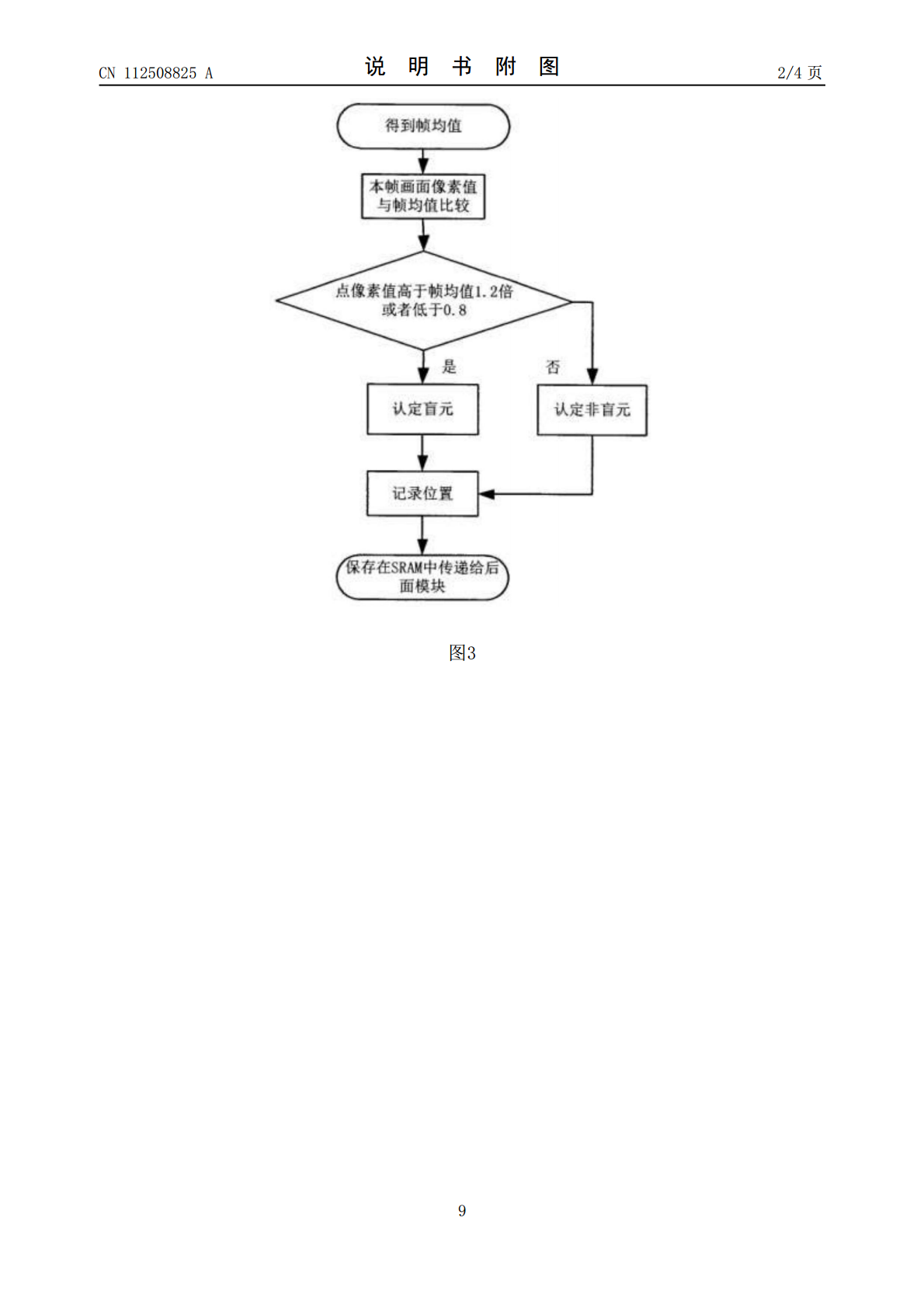
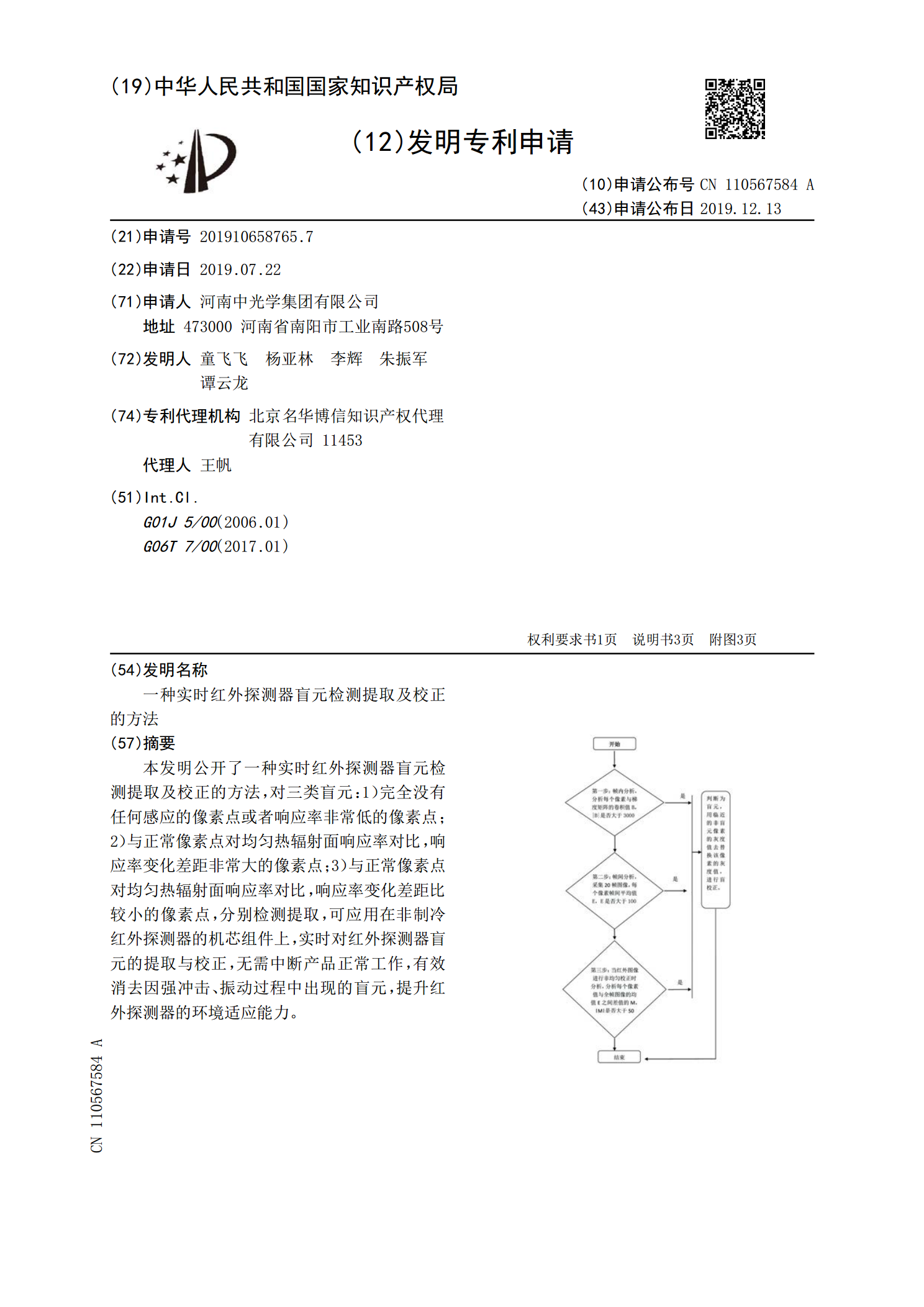
本发明公开了一种实时红外探测器盲元检测提取及校正的方法,对三类盲元:1)完全没有任何感应的像素点或者响应率非常低的像素点;2)与正常像素点对均匀热辐射面响应率对比,响应率变化差距非常大的像素点;3)与正常像素点对均匀热辐射面响应率对比,响应率变化差距比较小的像素点,分别检测提取,可应用在非制冷红外探测器的机芯组件上,实时对红外探测器盲元的提取与校正,无需中断产品正常工作,有效消去因强冲击、振动过程中出现的盲元,提升红外探测器的环境适应能力。

一种红外探测器盲元检测方法.pdf
本发明公开了一种红外探测器盲元检测方法,包括如下步骤:对红外探测器阵列进行多个温度点处的标定;及计算红外探测器的响应曲线及其曲线参数的正态分布特性;并利用3分布检测盲元。所述的标定采用可控温度的黑体放置于红外摄像仪近焦距清晰成像处,并使所述黑体充满图像画面;接着,使所述黑体的温度稳定在既定温度,并记录所述黑体温度、及所述黑体在该温度下对应的红外热像仪输出图像。本发明根据红外探测器响应函数的正态分布特性进行盲元检测,克服了现有盲元检测算法中邻域受噪声、边缘分布影响、阈值设置的缺陷。且本发明算法简单、易实现、

一种红外探测器盲元检测系统及方法.pdf
本发明涉及一种红外探测器盲元检测系统及方法,方法包括以下步骤:步骤S1.进行红外线探测,生成红外探测数据;步骤S2.按设定的时间间隔对红外探测数据进行采集,根据采集的红外探测数据对应生成探测图像;步骤S3.对探测图像中的每一个像元进行奇异检测,并将每一个像元出现奇异的概率记录进奇异概率表;步骤S4.奇异概率表中奇异概率高于或等于设定值的像元为盲元,进行盲元补偿。本发明相比上门维修和用户自行标定的方式效率高,检测精度高,不易发生误判。