
一种基于循环生成对抗网络的图像运动盲去模糊方法.pdf

萌运****魔王

1/10

2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于循环生成对抗网络的图像运动盲去模糊方法.pdf
本发明公开了一种基于循环生成对抗网络的图像运动盲去模糊方法,首先构建数据集,获取到数量比例为1:1的非成对的清晰与模糊图像作为输入数据;接下来构建生成器网络和鉴别器网络,然后定义损失函数,损失函数由对抗损失和域间循环不变损失组成;最后对鉴别器网络和生成器网络依次进行训练,使得两者达到纳什均衡的状态后训练完毕。本发明利用循环生成对抗网络的原理,在缺少成对数据支持的去模糊任务中有效的利用非成对的数据进行训练并产生较好的效果。

一种基于生成对抗网络的图像盲去模糊方法.pdf
本发明提供一种基于生成对抗网络的图像盲去模糊方法。本发明首先建立用于网络训练的损失函数,包括对抗损失项(AdversarialLoss)和内容损失项(ContentLoss);然后进行生成对抗网络结构的搭建;再采用基于随机轨迹的的运动模糊数据集生成方法,生成清晰‑模糊图像对;最后采用生成的清晰‑模糊图像对,训练生成对抗网络网络。本发明在低计算资源消耗的情况下,能做到相对较快的图像去模糊速度,并明显快于其他去模糊方法,本发明提出了一种基于随机轨迹的运动模糊数据集生成方法,可以任意生成大量的清晰‑模糊图像
基于循环多尺度生成对抗网络的图像盲去运动模糊方法.pdf
本发明公开了一种基于循环多尺度生成对抗网络的图像盲去运动模糊方法。本发明方法以循环多尺度编码器和解码器作为生成器,并构建了相应的判决器。以生成图像和清晰图像的对抗性损失、多尺度均方误差和多尺度梯度误差作为生成对抗网络的损失函数,以梯度下降法优化损失函数。本发明运用生成对抗网络学习运动模糊图像与其对应清晰图像之间的关系,省去了复杂的模糊核估计过程。本发明方法可以提取图像的边缘特征,具有更简单的网络结构、更少的参数,并且该网络模型更容易训练,且复原效果较好。
基于改进的生成对抗网络的图像去模糊方法.pdf
本发明公开了一种基于改进的生成对抗网络的图像去模糊方法,包括步骤:一、将待去模糊的图像输入预先训练好的改进的生成对抗网络中;二、所述改进的生成对抗网络对待去模糊的图像进行去模糊处理,得到去模糊后的图像。本发明针对非盲去模糊方法估计模糊核时的不适定问题,采用深度学习的方法,在分析生成对抗网络的理论基础上,提出了一种基于改进的生成对抗网络的图像去模糊方法,在生成对抗网络的基础上,构建了改进的生成对抗网络,引入加权的思想构建新的目标函数,通过调节权值系数来平衡正向KL散度和反向KL散度的占比,能够更好地复原出清
一种基于生成对抗网络的图像运动模糊盲去除方法.pdf
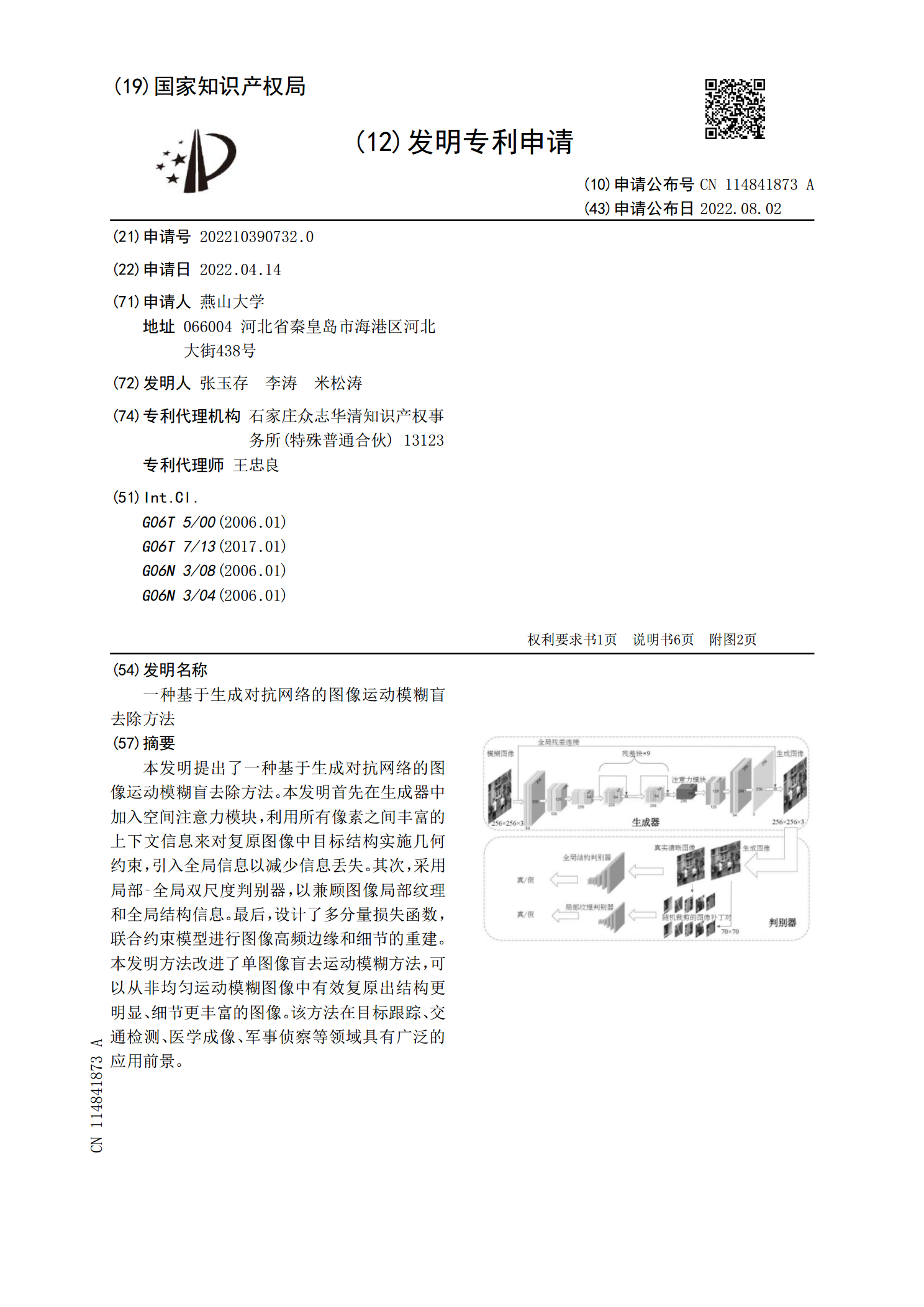
本发明提出了一种基于生成对抗网络的图像运动模糊盲去除方法。本发明首先在生成器中加入空间注意力模块,利用所有像素之间丰富的上下文信息来对复原图像中目标结构实施几何约束,引入全局信息以减少信息丢失。其次,采用局部‑全局双尺度判别器,以兼顾图像局部纹理和全局结构信息。最后,设计了多分量损失函数,联合约束模型进行图像高频边缘和细节的重建。本发明方法改进了单图像盲去运动模糊方法,可以从非均匀运动模糊图像中有效复原出结构更明显、细节更丰富的图像。该方法在目标跟踪、交通检测、医学成像、军事侦察等领域具有广泛的应用前景。