
障碍物检测方法、装置、电子设备及存储介质.pdf

涵蓄****09


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

障碍物检测方法、装置、电子设备及存储介质.pdf
本公开关于一种障碍物检测方法、装置、电子设备及存储介质。所述方法包括:对获取的待处理图像进行特征提取,获取多个维度的矩阵特征,每个维度的矩阵特征对应不同的尺寸;分别以每个维度的矩阵特征作为基准尺寸特征,将非基准尺寸特征进行特征缩放,得到各个基准尺寸特征对应的缩放特征;将所述基准尺寸特征与所述基准尺寸特征对应的缩放特征进行特征融合,得到所述基准尺寸特征对应的融合特征;根据各个所述基准尺寸特征对应的融合特征对所述待处理图像进行处理,得到所述待处理图像中的障碍物检测结果。采用本方法可以在不显著增加计算量的前提下
障碍物检测方法、装置、电子设备及存储介质.pdf
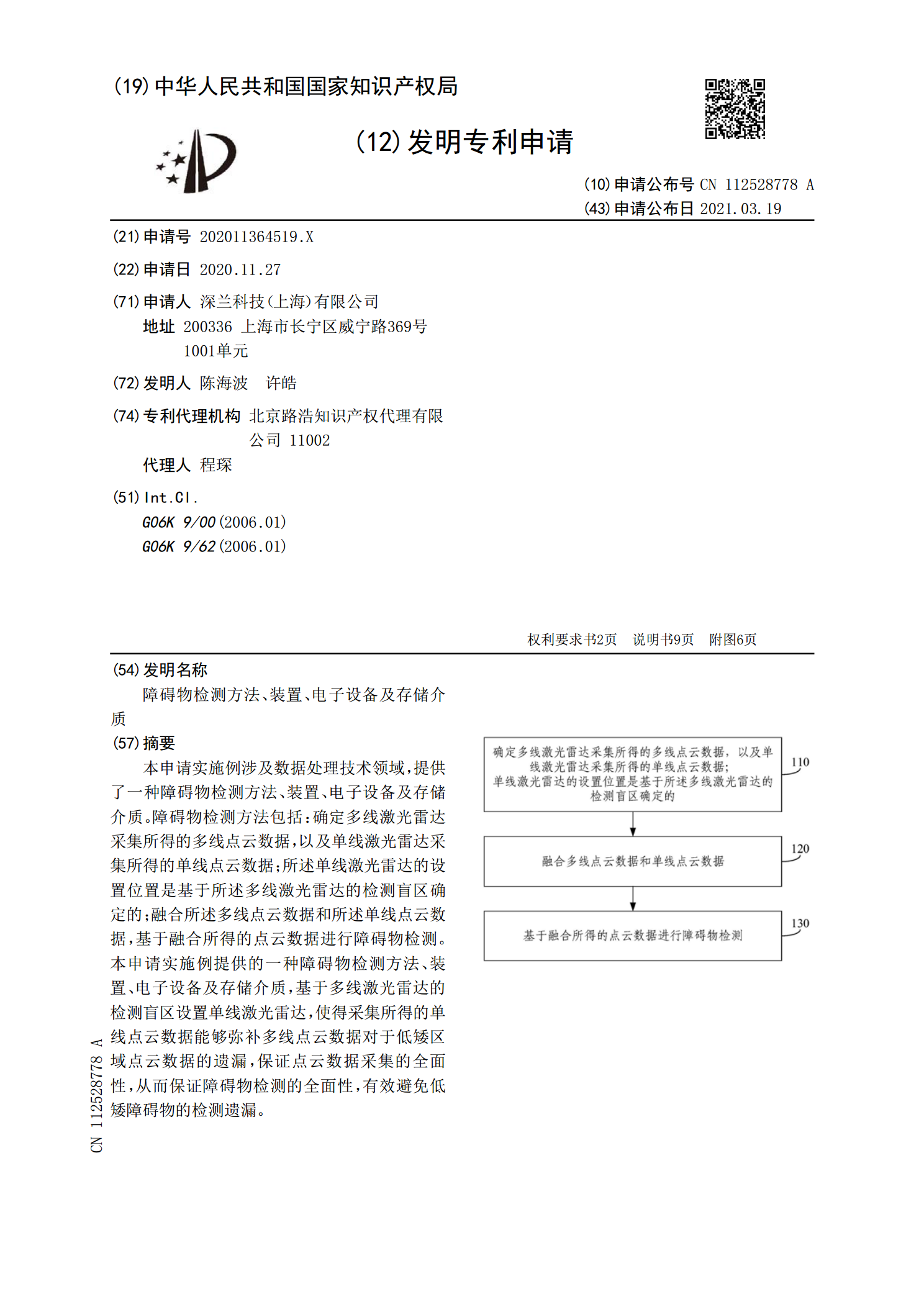
本申请实施例涉及数据处理技术领域,提供了一种障碍物检测方法、装置、电子设备及存储介质。障碍物检测方法包括:确定多线激光雷达采集所得的多线点云数据,以及单线激光雷达采集所得的单线点云数据;所述单线激光雷达的设置位置是基于所述多线激光雷达的检测盲区确定的;融合所述多线点云数据和所述单线点云数据,基于融合所得的点云数据进行障碍物检测。本申请实施例提供的一种障碍物检测方法、装置、电子设备及存储介质,基于多线激光雷达的检测盲区设置单线激光雷达,使得采集所得的单线点云数据能够弥补多线点云数据对于低矮区域点云数据的遗漏
障碍物的检测方法、装置、电子设备及存储介质.pdf
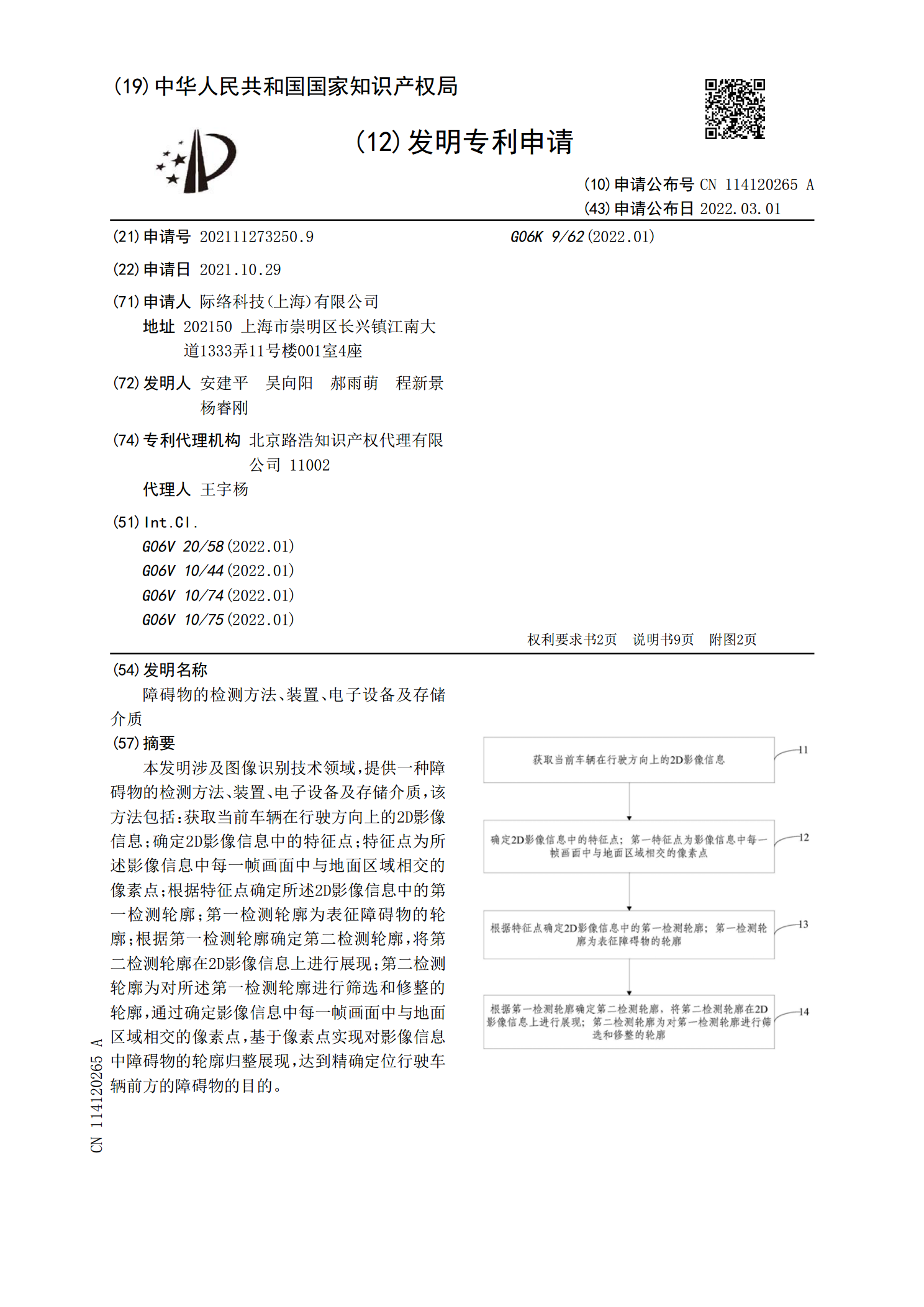
本发明涉及图像识别技术领域,提供一种障碍物的检测方法、装置、电子设备及存储介质,该方法包括:获取当前车辆在行驶方向上的2D影像信息;确定2D影像信息中的特征点;特征点为所述影像信息中每一帧画面中与地面区域相交的像素点;根据特征点确定所述2D影像信息中的第一检测轮廓;第一检测轮廓为表征障碍物的轮廓;根据第一检测轮廓确定第二检测轮廓,将第二检测轮廓在2D影像信息上进行展现;第二检测轮廓为对所述第一检测轮廓进行筛选和修整的轮廓,通过确定影像信息中每一帧画面中与地面区域相交的像素点,基于像素点实现对影像信息中障碍

障碍物检测方法、装置、电子设备及存储介质.pdf
本发明实施例公开了一种障碍物检测方法、装置、电子设备及存储介质,该方法包括:基于图像语义分割算法对接收到的待处理图像进行分割处理,得到待检测图像;确定待检测图像中的至少一个二维目标检测框,以及各二维目标检测框的待转换位置信息;根据各二维目标检测框的待转换位置信息以及变换矩阵,得到与各二维目标检测框相对应的三维检测框,以及各三维检测框的目标位置信息;基于各目标位置信息,确定目标障碍物。本技术方案,解决了对于低障碍物无法进行有效检测,进而导致无法实现有效避障的问题,实现了有效对低障碍物进行检测,进而基于检测到

障碍物轨迹预测方法、装置、电子设备及存储介质.pdf
本发明实施例公开了一种障碍物轨迹预测方法、装置、电子设备及存储介质,包括:根据目标车辆的基准位置信息,确定至少一个障碍物的障碍位置信息,将车载高精地图,基准位置信息和障碍位置信息转换到弗莱纳坐标系中;根据各障碍位置信息和车载高精地图,确定各障碍物的车道属性;基于障碍物的历史轨迹、障碍运动速度和障碍物的车道属性拟合得到第一概率,并基于预先训练的轨迹预测模型,对障碍位置信息、障碍运动速度和车道属性处理确定第二概率;基于第一概率和第二概率确定目标换道概率,并根据车道属性、障碍位置信息、障碍运动速度和目标换道概率