
大型车辆盲区双向预警系统.pdf

元枫****文章

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
大型车辆盲区双向预警系统.pdf
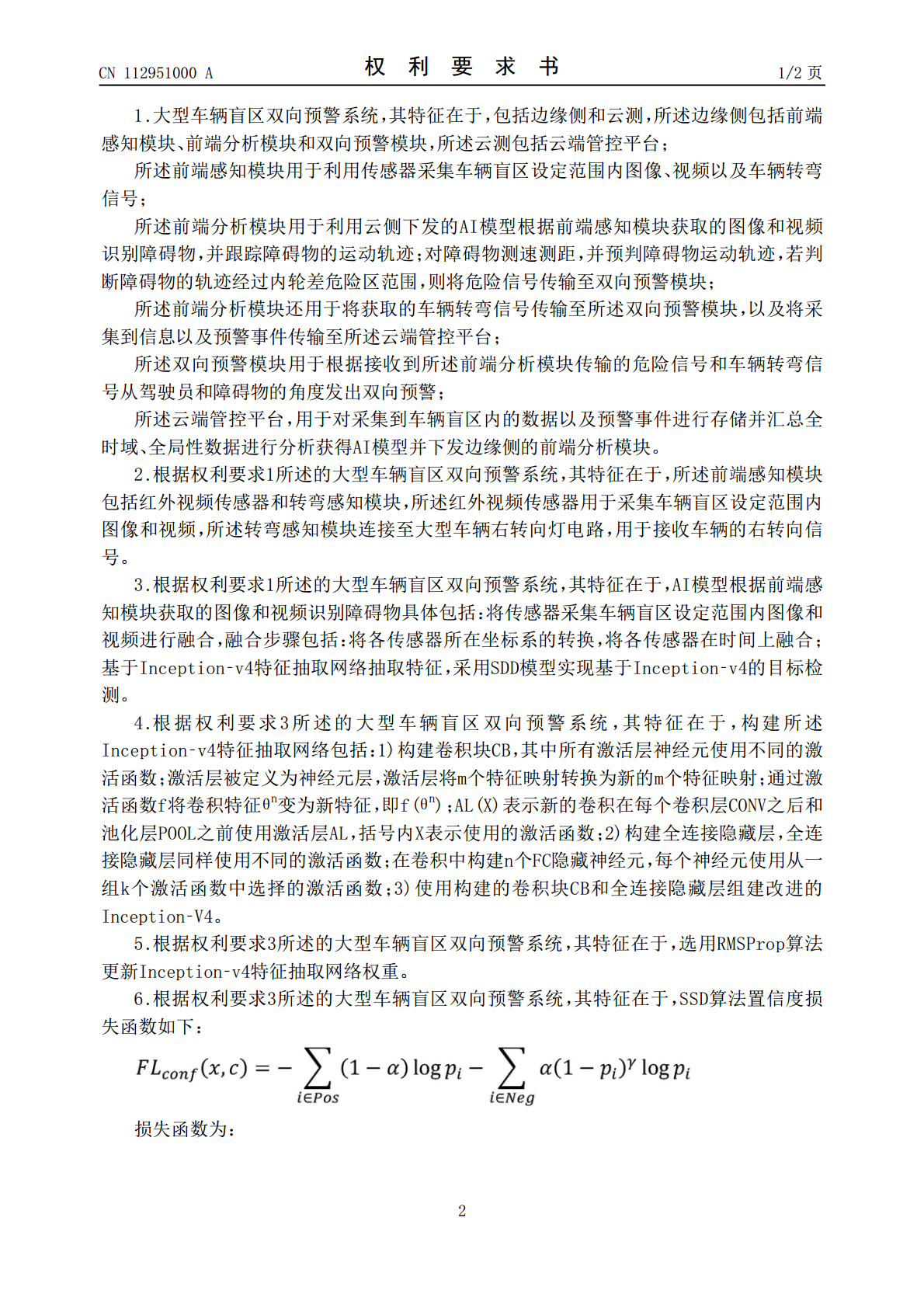
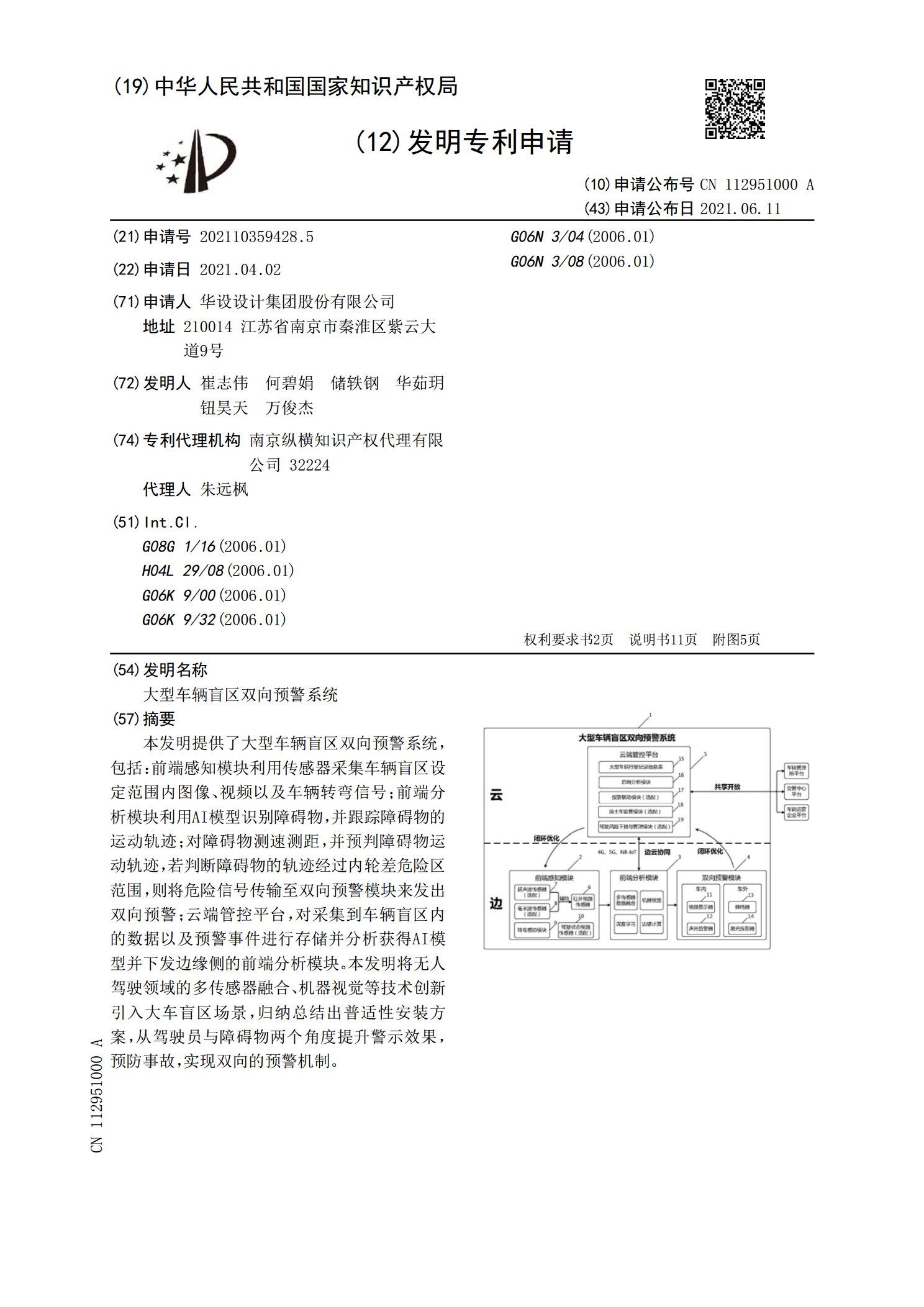
本发明提供了大型车辆盲区双向预警系统,包括:前端感知模块利用传感器采集车辆盲区设定范围内图像、视频以及车辆转弯信号;前端分析模块利用AI模型识别障碍物,并跟踪障碍物的运动轨迹;对障碍物测速测距,并预判障碍物运动轨迹,若判断障碍物的轨迹经过内轮差危险区范围,则将危险信号传输至双向预警模块来发出双向预警;云端管控平台,对采集到车辆盲区内的数据以及预警事件进行存储并分析获得AI模型并下发边缘侧的前端分析模块。本发明将无人驾驶领域的多传感器融合、机器视觉等技术创新引入大车盲区场景,归纳总结出普适性安装方案,从驾驶
车辆盲区监测预警系统和车辆.pdf
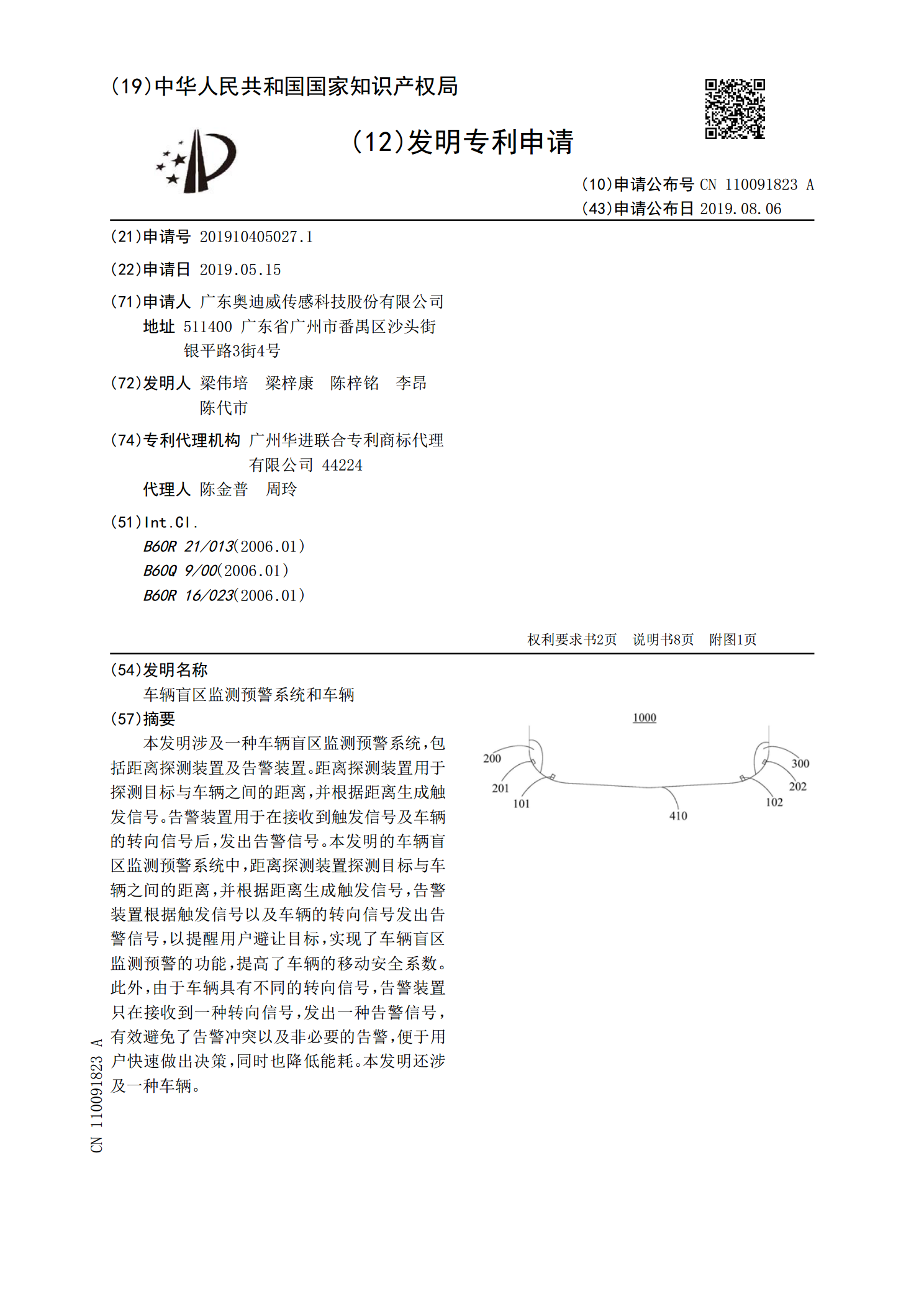
本发明涉及一种车辆盲区监测预警系统,包括距离探测装置及告警装置。距离探测装置用于探测目标与车辆之间的距离,并根据距离生成触发信号。告警装置用于在接收到触发信号及车辆的转向信号后,发出告警信号。本发明的车辆盲区监测预警系统中,距离探测装置探测目标与车辆之间的距离,并根据距离生成触发信号,告警装置根据触发信号以及车辆的转向信号发出告警信号,以提醒用户避让目标,实现了车辆盲区监测预警的功能,提高了车辆的移动安全系数。此外,由于车辆具有不同的转向信号,告警装置只在接收到一种转向信号,发出一种告警信号,有效避免了告

车辆盲区双向提醒系统.pdf
一种车辆盲区双向提醒系统,由转角传感器、挡位传感器、摄像头、显示屏、扬声器、超声波传感器、投影模块和微电脑模块组成,转角传感器安装在车辆的方向盘转轴上,挡位传感器安装在车辆的变速箱上,显示屏、扬声器和微电脑模块安装在车辆的中控台上,多个摄像头、多个超声波传感器和多个投影模块分别安装在车辆的各个盲区处,转角传感器、挡位传感器、摄像头和超声波传感器的信号输出端连接在微电脑模块的信号输入端,显示屏、扬声器和投影模块的信号输入端连接在微电脑模块的信号输出端。本发明的有益效果是,可在车辆行进方向的盲区内有人或障碍物
车辆盲区防撞预警系统及方法.pdf
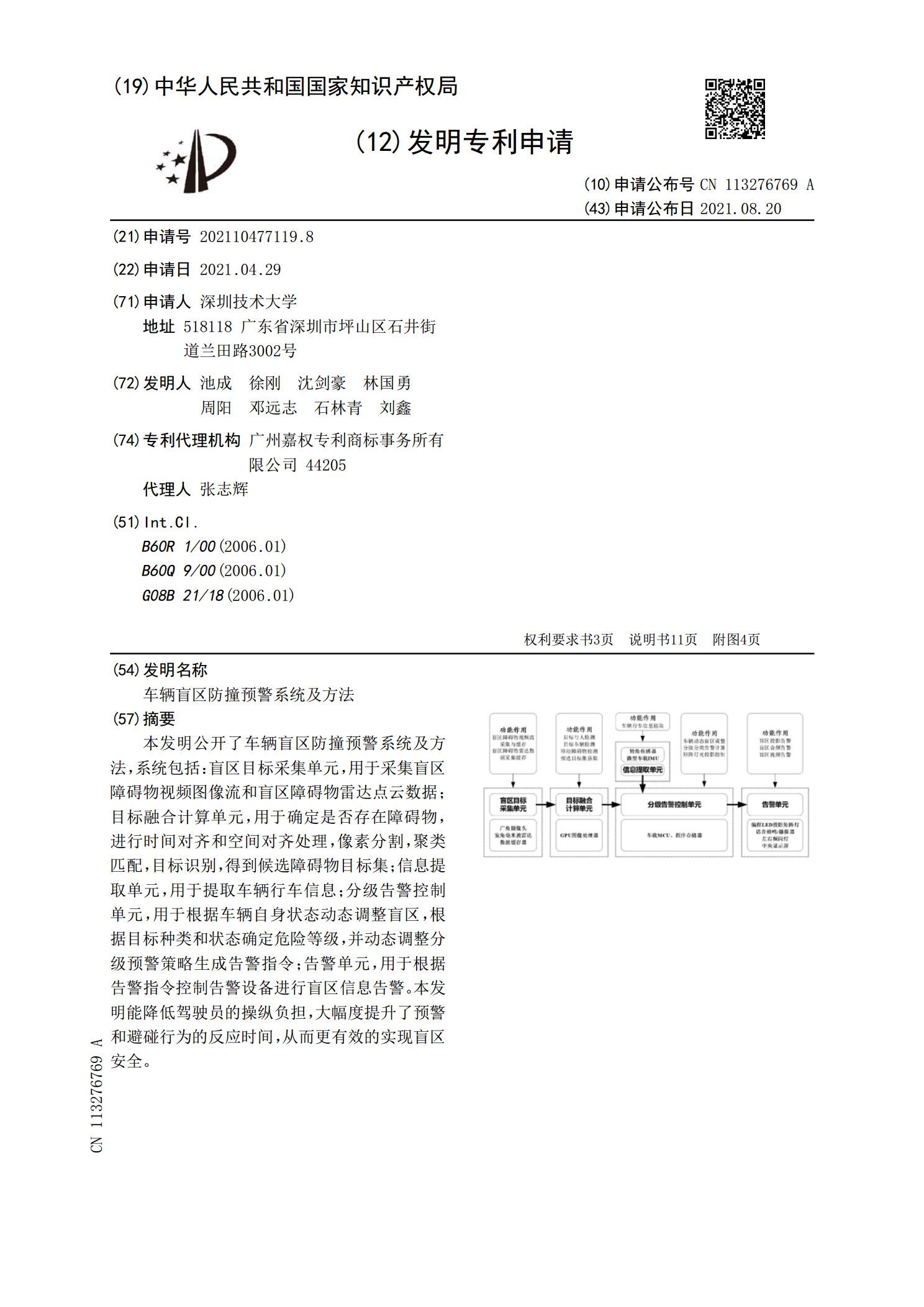
本发明公开了车辆盲区防撞预警系统及方法,系统包括:盲区目标采集单元,用于采集盲区障碍物视频图像流和盲区障碍物雷达点云数据;目标融合计算单元,用于确定是否存在障碍物,进行时间对齐和空间对齐处理,像素分割,聚类匹配,目标识别,得到候选障碍物目标集;信息提取单元,用于提取车辆行车信息;分级告警控制单元,用于根据车辆自身状态动态调整盲区,根据目标种类和状态确定危险等级,并动态调整分级预警策略生成告警指令;告警单元,用于根据告警指令控制告警设备进行盲区信息告警。本发明能降低驾驶员的操纵负担,大幅度提升了预警和避碰行
消除大型车辆盲区的装置.pdf
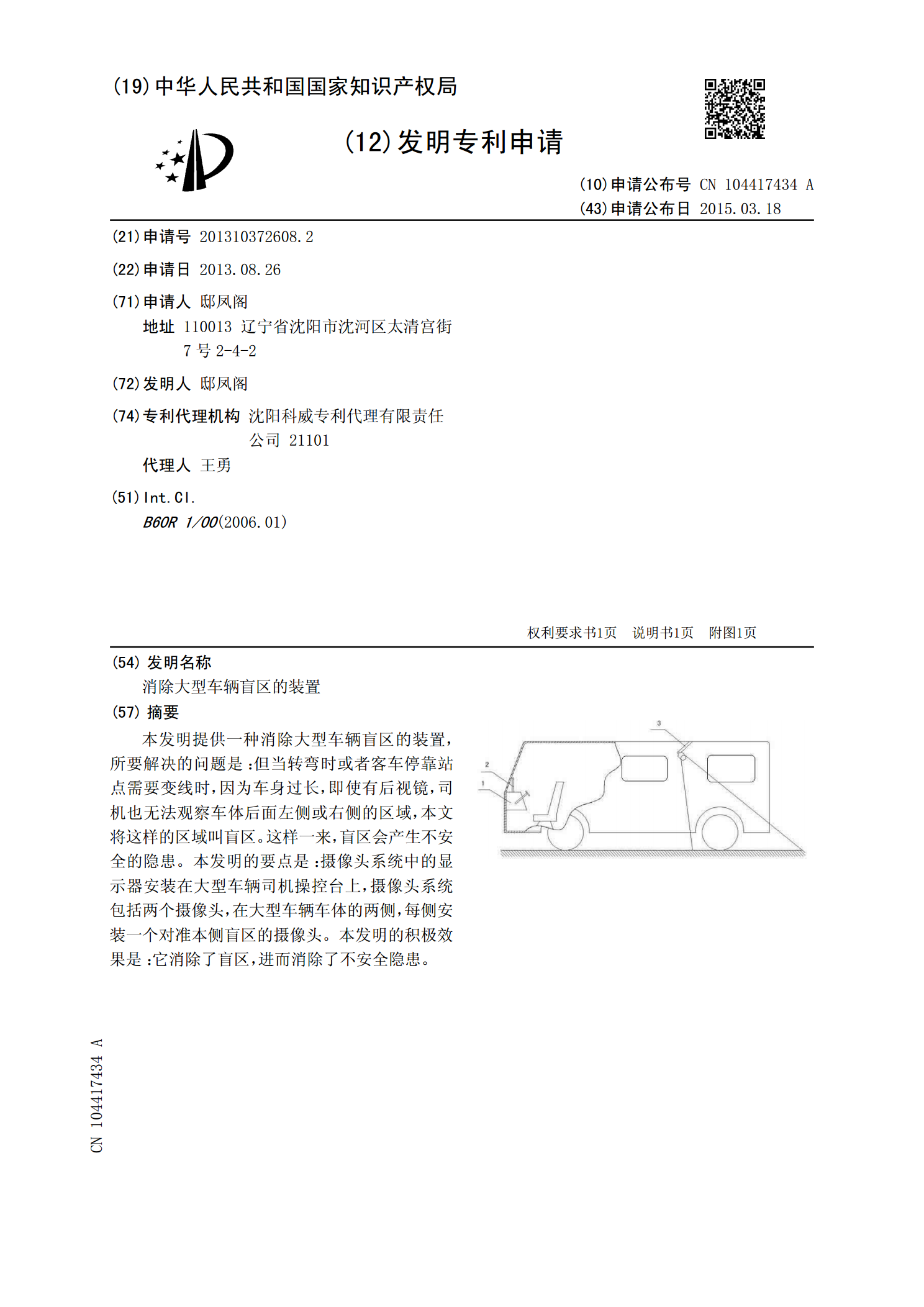
本发明提供一种消除大型车辆盲区的装置,所要解决的问题是:但当转弯时或者客车停靠站点需要变线时,因为车身过长,即使有后视镜,司机也无法观察车体后面左侧或右侧的区域,本文将这样的区域叫盲区。这样一来,盲区会产生不安全的隐患。本发明的要点是:摄像头系统中的显示器安装在大型车辆司机操控台上,摄像头系统包括两个摄像头,在大型车辆车体的两侧,每侧安装一个对准本侧盲区的摄像头。本发明的积极效果是:它消除了盲区,进而消除了不安全隐患。