
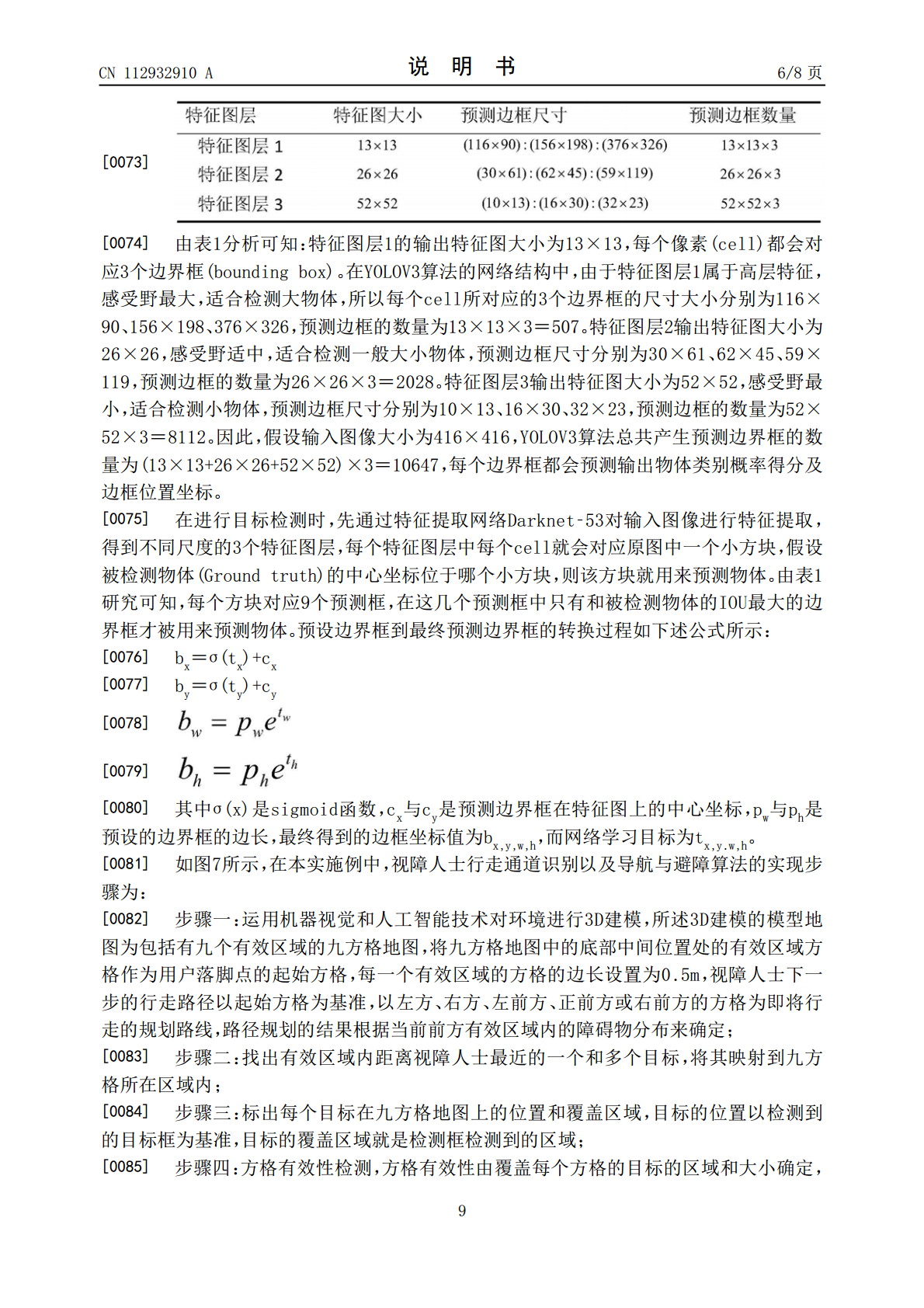
一种穿戴式智能感知导盲系统.pdf

mm****酱吖


1/10

2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种穿戴式智能感知导盲系统.pdf
本发明公开一种穿戴式智能感知导盲系统,包括有MCU主控单元、双目摄像头、语音播报模块、GPS定位模块、本地储存器、4G/5G通信接口以及天线,所述双目摄像头通过USB接口与MCU主控单元相连接,所述GPS定位模块通过UART接口与MCU主控单元相连接,所述本地储存器通过总线接口与MCU主控单元相连接,所述4G/5G通信接口通过DTU接口与MCU主控单元相连接,在所述4G/5G通信接口上连接有天线,语音播报模块通过UART接口与MCU主控单元相连接;由双目摄像头来采集环境信息,MCU主控单元运用CNN深度学

一种智能穿戴导盲系统.pdf
本发明涉及智能穿戴设备技术领域,具体涉及一种智能穿戴导盲系统,包括:导航模块,用于接收用户的语音指令,并根据语音指令生成最优路径的语音信息以进行导航;障碍物探测模块,包括脚部超声探测单元、腰部超声探测单元及头部超声探测单元,分别用于探测用户身体各个高度的障碍物,并向用户发出障碍警报;信号灯识别模块,用于识别交通信号灯,并提醒用户通行或等待;通信模块,用于实现导航模块、障碍物探测模块、信号灯识别模块与处理模块的信号传输;处理模块,分别与导航模块、障碍物探测模块、信号灯识别模块及通信模块电连接,用于对各个模块

一种智能穿戴导盲系统.pdf
本发明涉及智能穿戴设备技术领域,具体涉及一种智能穿戴导盲系统,包括:导航模块,用于接收用户的语音指令,并根据语音指令生成最优路径的语音信息以进行导航;障碍物探测模块,包括脚部超声探测单元、腰部超声探测单元及头部超声探测单元,分别用于探测用户身体各个高度的障碍物,并向用户发出障碍警报;信号灯识别模块,用于识别交通信号灯,并提醒用户通行或等待;通信模块,用于实现导航模块、障碍物探测模块、信号灯识别模块与处理模块的信号传输;处理模块,分别与导航模块、障碍物探测模块、信号灯识别模块及通信模块电连接,用于对各个模块
一种可穿戴式的智能导盲系统及方法.pdf
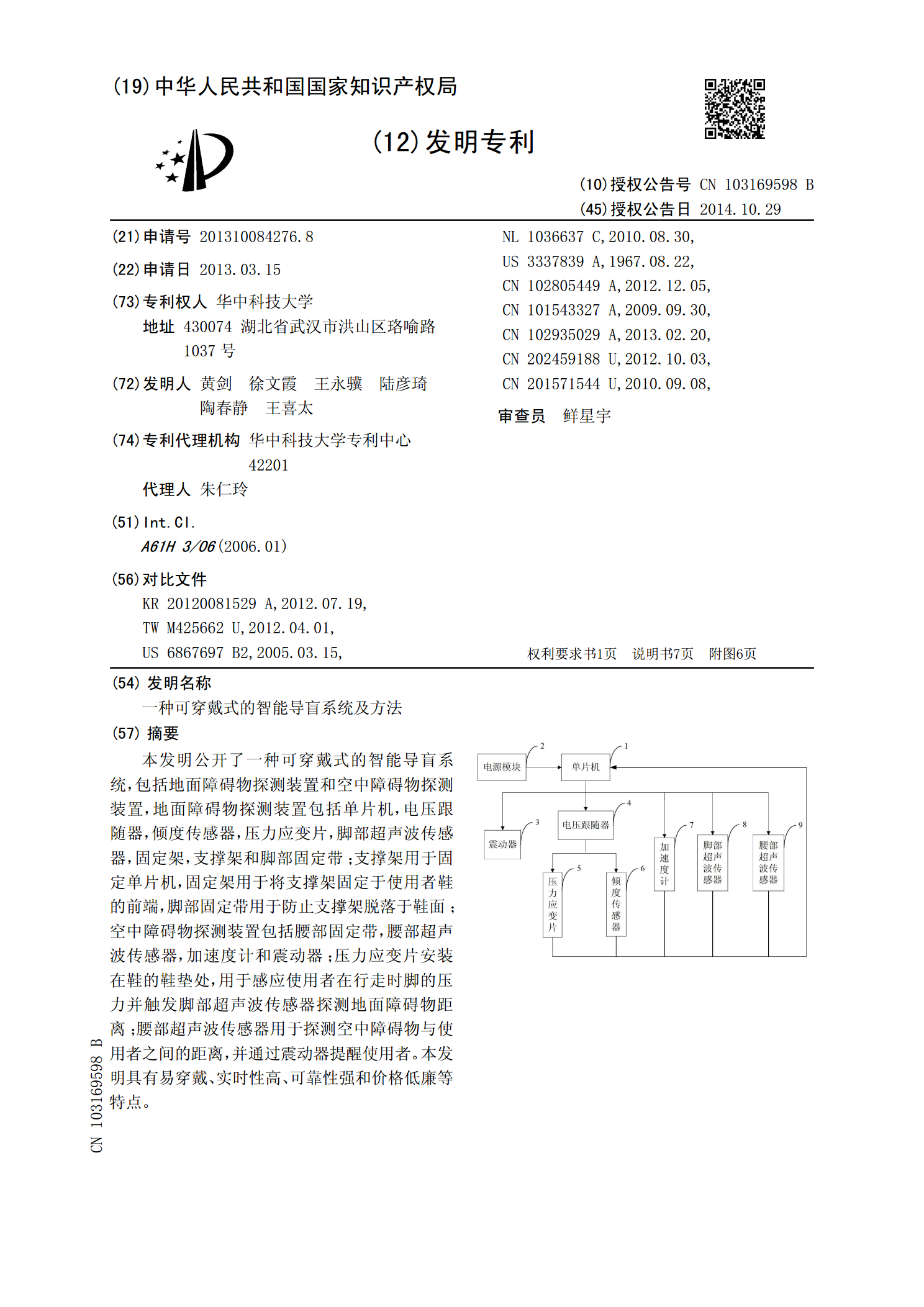
本发明公开了一种可穿戴式的智能导盲系统,包括地面障碍物探测装置和空中障碍物探测装置,地面障碍物探测装置包括单片机,电压跟随器,倾度传感器,压力应变片,脚部超声波传感器,固定架,支撑架和脚部固定带;支撑架用于固定单片机,固定架用于将支撑架固定于使用者鞋的前端,脚部固定带用于防止支撑架脱落于鞋面;空中障碍物探测装置包括腰部固定带,腰部超声波传感器,加速度计和震动器;压力应变片安装在鞋的鞋垫处,用于感应使用者在行走时脚的压力并触发脚部超声波传感器探测地面障碍物距离;腰部超声波传感器用于探测空中障碍物与使用者之间
一种可穿戴式智能导盲装置.pdf
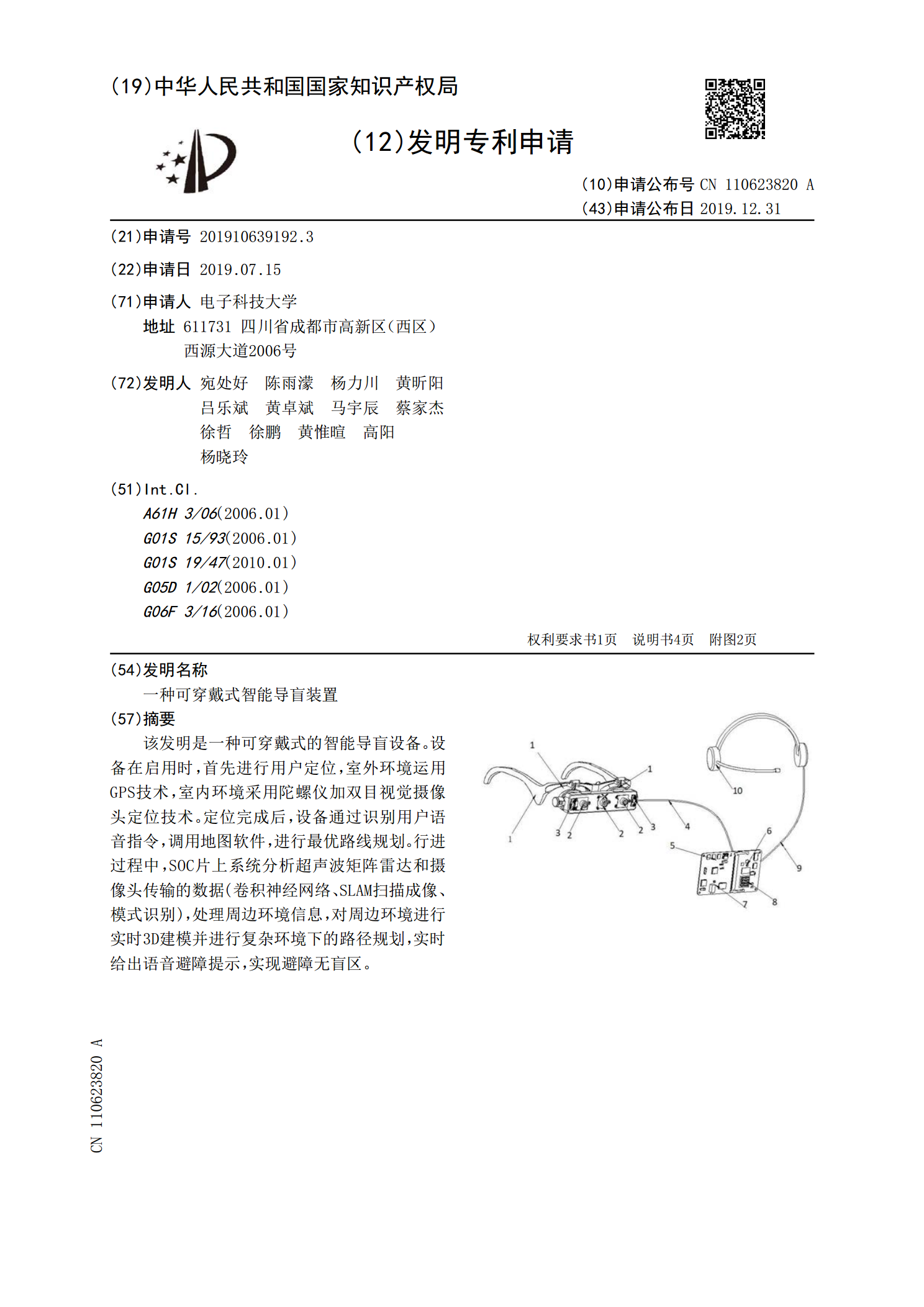
该发明是一种可穿戴式的智能导盲设备。设备在启用时,首先进行用户定位,室外环境运用GPS技术,室内环境采用陀螺仪加双目视觉摄像头定位技术。定位完成后,设备通过识别用户语音指令,调用地图软件,进行最优路线规划。行进过程中,SOC片上系统分析超声波矩阵雷达和摄像头传输的数据(卷积神经网络、SLAM扫描成像、模式识别),处理周边环境信息,对周边环境进行实时3D建模并进行复杂环境下的路径规划,实时给出语音避障提示,实现避障无盲区。