
一种用于盲人室内导引的智能交互机器人.pdf

书生****专家

1/10
2/10

3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于盲人室内导引的智能交互机器人.pdf
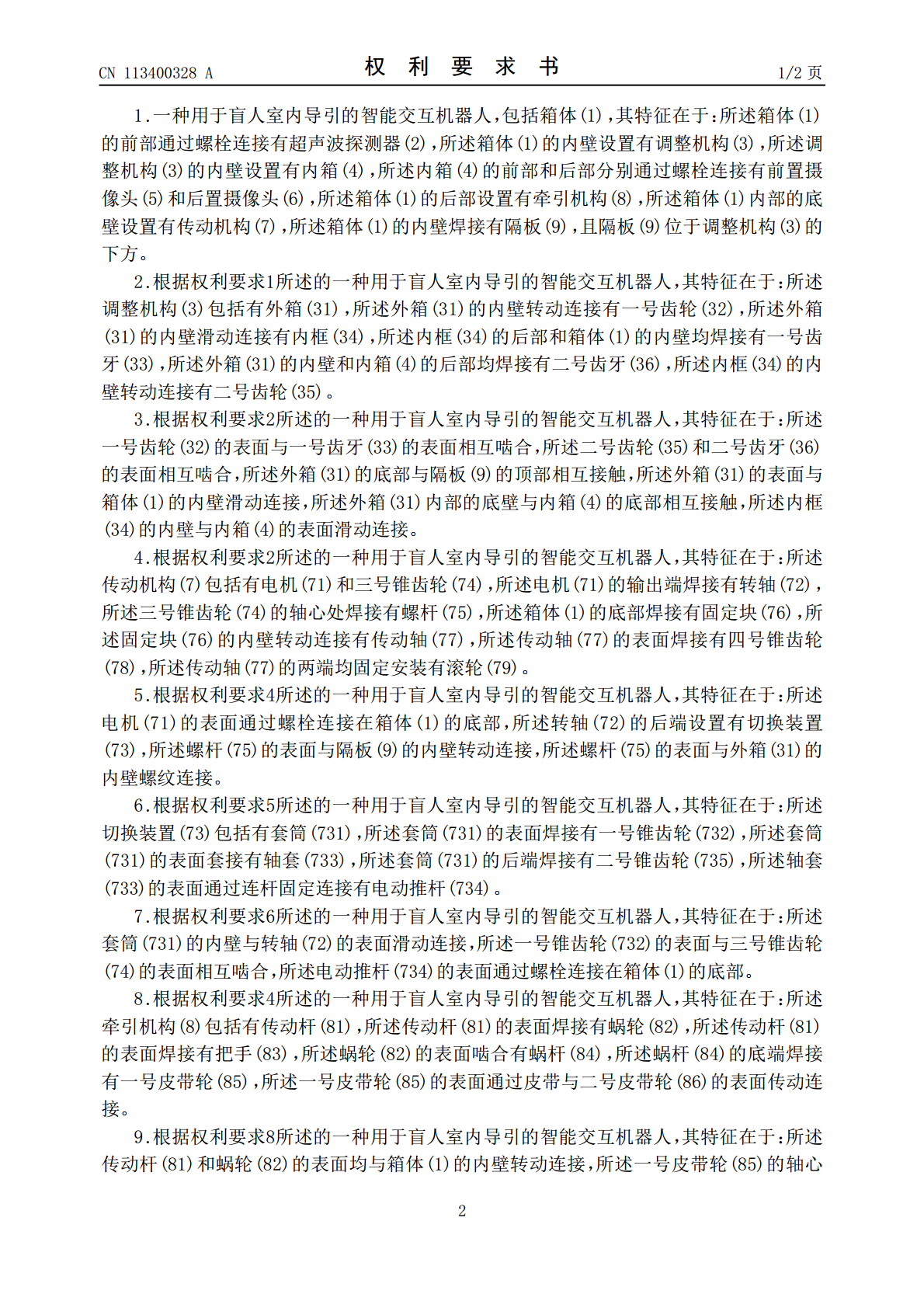
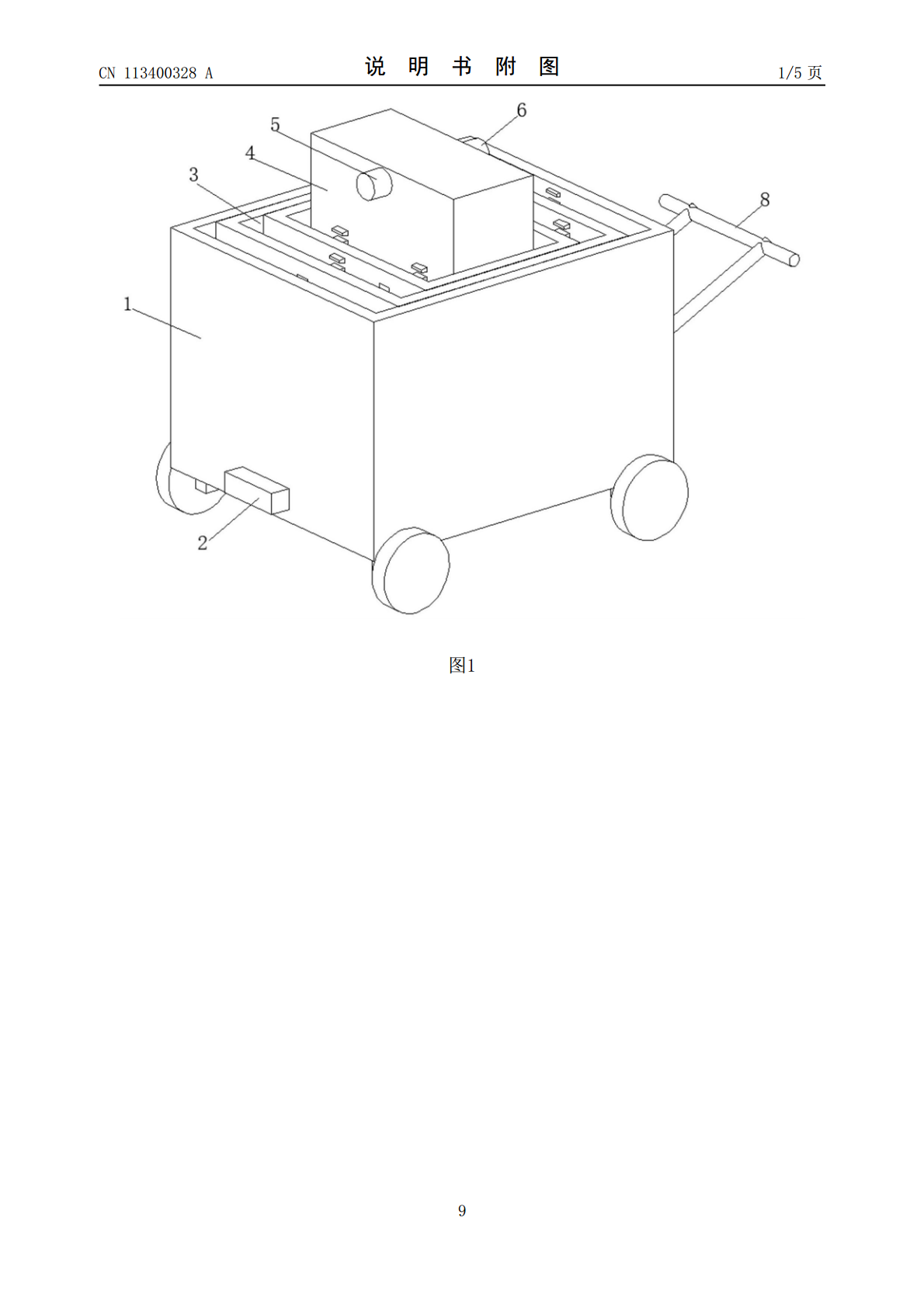
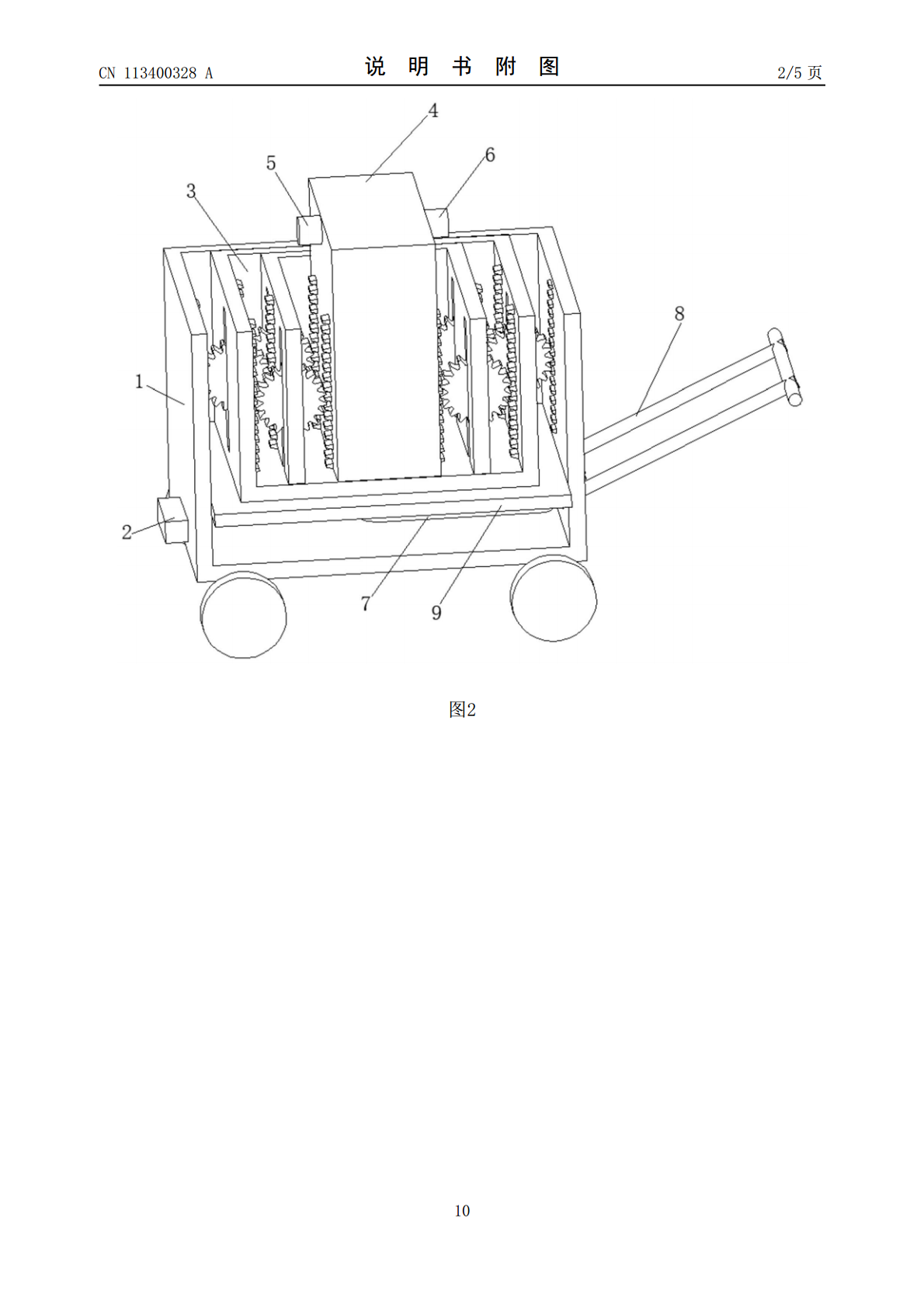
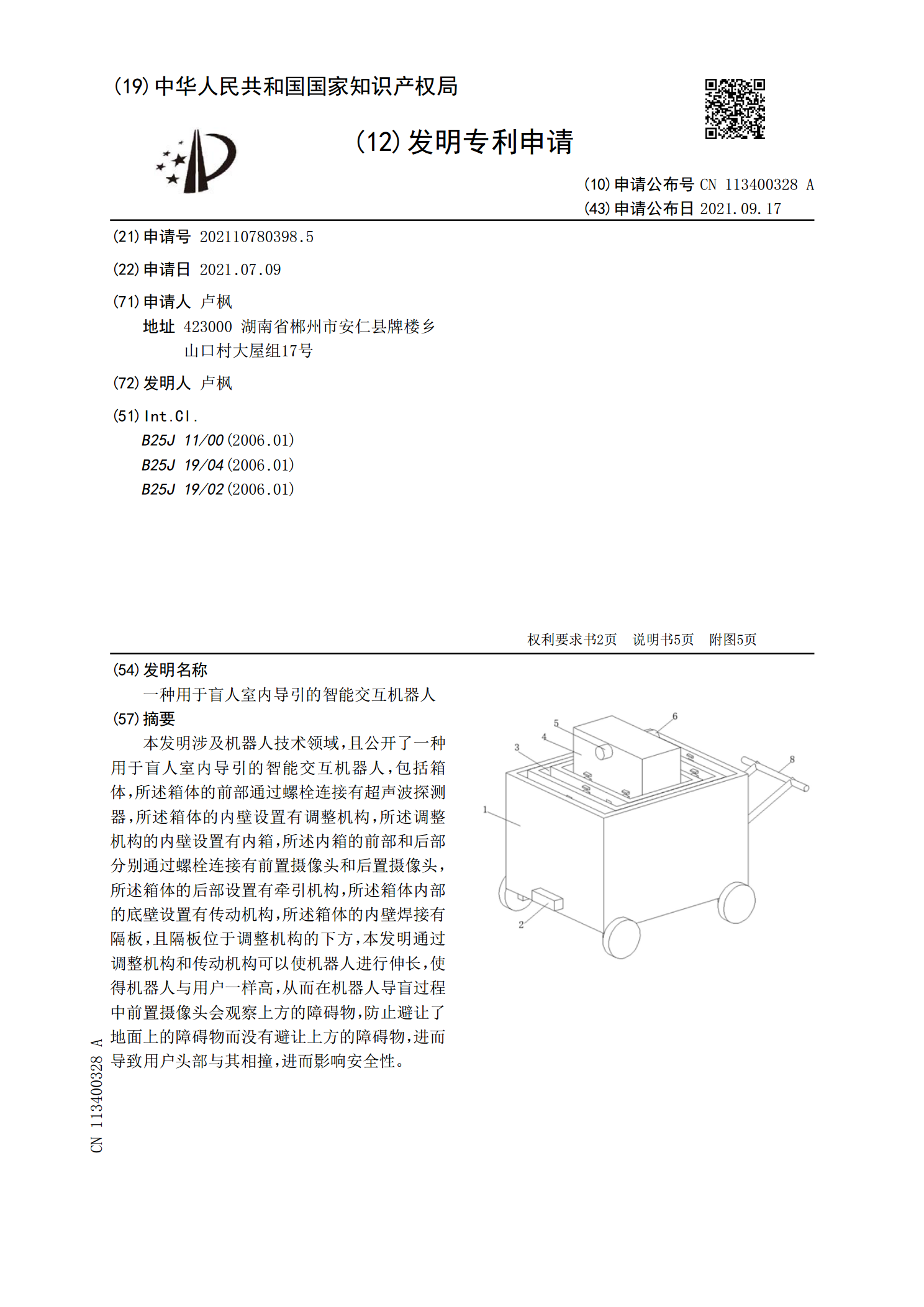
本发明涉及机器人技术领域,且公开了一种用于盲人室内导引的智能交互机器人,包括箱体,所述箱体的前部通过螺栓连接有超声波探测器,所述箱体的内壁设置有调整机构,所述调整机构的内壁设置有内箱,所述内箱的前部和后部分别通过螺栓连接有前置摄像头和后置摄像头,所述箱体的后部设置有牵引机构,所述箱体内部的底壁设置有传动机构,所述箱体的内壁焊接有隔板,且隔板位于调整机构的下方,本发明通过调整机构和传动机构可以使机器人进行伸长,使得机器人与用户一样高,从而在机器人导盲过程中前置摄像头会观察上方的障碍物,防止避让了地面上的障碍
一种用于智能机器人的语音交互输出方法及机器人.pdf
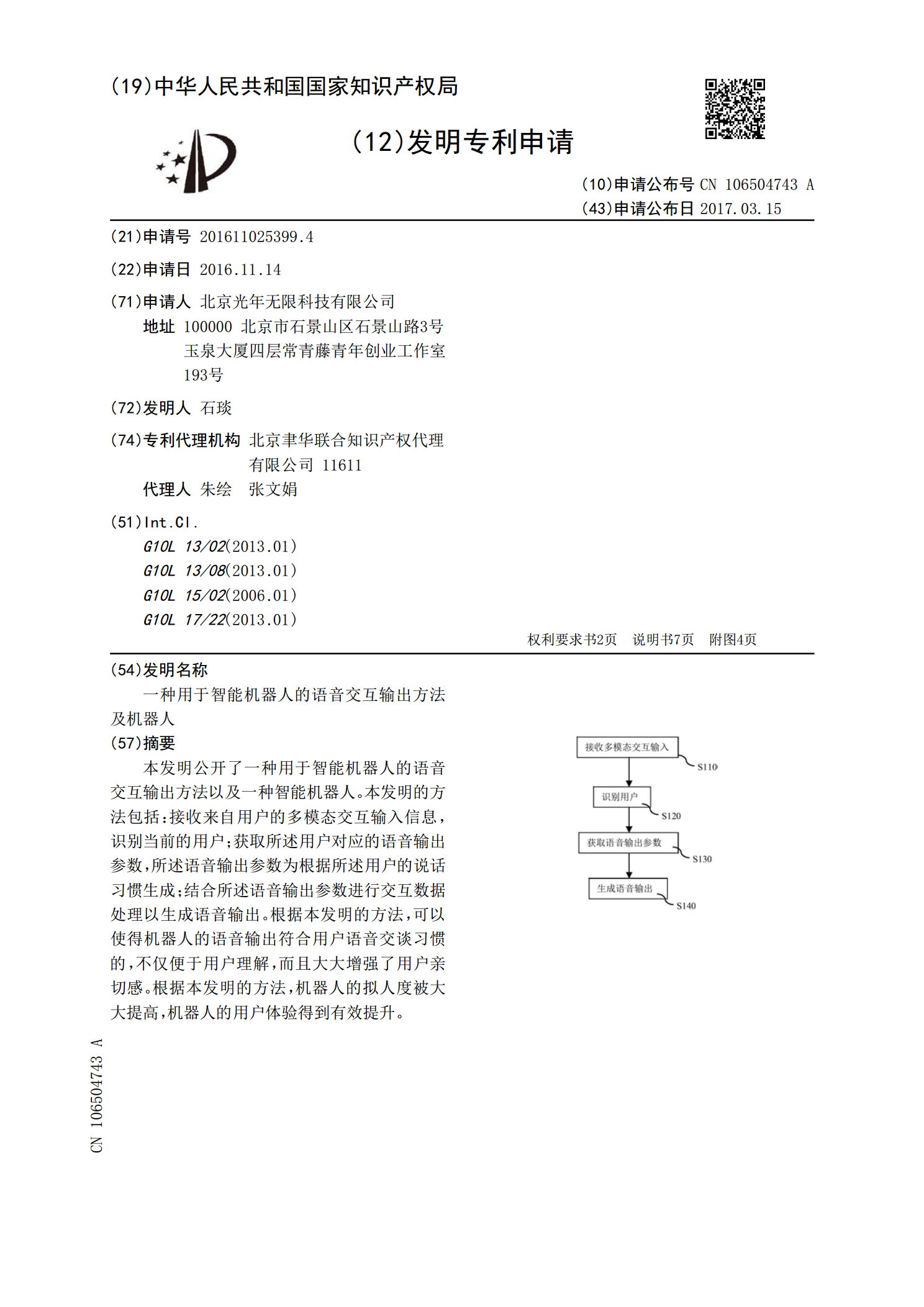
本发明公开了一种用于智能机器人的语音交互输出方法以及一种智能机器人。本发明的方法包括:接收来自用户的多模态交互输入信息,识别当前的用户;获取所述用户对应的语音输出参数,所述语音输出参数为根据所述用户的说话习惯生成;结合所述语音输出参数进行交互数据处理以生成语音输出。根据本发明的方法,可以使得机器人的语音输出符合用户语音交谈习惯的,不仅便于用户理解,而且大大增强了用户亲切感。根据本发明的方法,机器人的拟人度被大大提高,机器人的用户体验得到有效提升。

一种智能交互机器人提醒休息的方法及智能交互机器人.pdf
发明实施例提供一种智能交互机器人提醒休息的方法及智能交互机器人,该方法包括:针对智能交互机器人的每个应用预先设定对应的休息条件和休息模式;存储每个应用及其对应的休息条件和休息模式;交互对象使用智能交互机器人的应用;当应用对应的休息条件满足时,智能交互机器人启动对应的休息模式,采用了该实施例,解决现有的智能交互机器人无法提醒交互对象休息的问题。

一种用于室内清洁的智能机器人.pdf
本发明公开了一种用于室内清洁的智能机器人,包括底板,底板上有水箱支座以及支座用来固定水箱,其中支座还用来固定电机以及驱动轮,底板上开有拖把进出口以及水箱出水孔,在与水箱靠近的底板上有吸尘器头部、中部以及高速大扭矩电机,在支座及水箱支座上方是底部具有开口的水箱,水箱下方是步进电机以及有导轨导向的推块,水箱上方是带开口的过滤层,过滤层上固定丝杠步进电机,丝杠螺母上有支架,支架上设置凸缘并连有调速电机,电机通过联轴器连接拖把。优点:通过智能清洁机器人完成室内地面的拖洗、清洁等操作,通过前置过滤器、增压泵及过滤层

一种用于智能机器人的交互数据处理方法.pdf
本发明公开了一种用于智能机器人的交互数据处理方法以及机器人。所述方法包括:接收来自用户的多模态交互输入信息,识别当前的用户;提取当前的所述用户对应的机器人性格,所述机器人性格为根据所述用户的性格特征生成,所述性格特征为所述用户多轮多模态输入数据的性格参量训练所得;结合所述机器人性格进行交互数据处理以生成多模态交互输出。根据本发明的方法以及机器人,使得机器人的交互输出可以体现机器人的性格,大大提高了机器人的拟人化水平;进一步的,机器人输出所体现的机器人性格通过当前用户的性格进行养成,使得机器人的交互输出更加