
一种制冷型面阵红外探测器的盲元检测方法.pdf

努力****凌芹


1/7
2/7
3/7

4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种制冷型面阵红外探测器的盲元检测方法.pdf
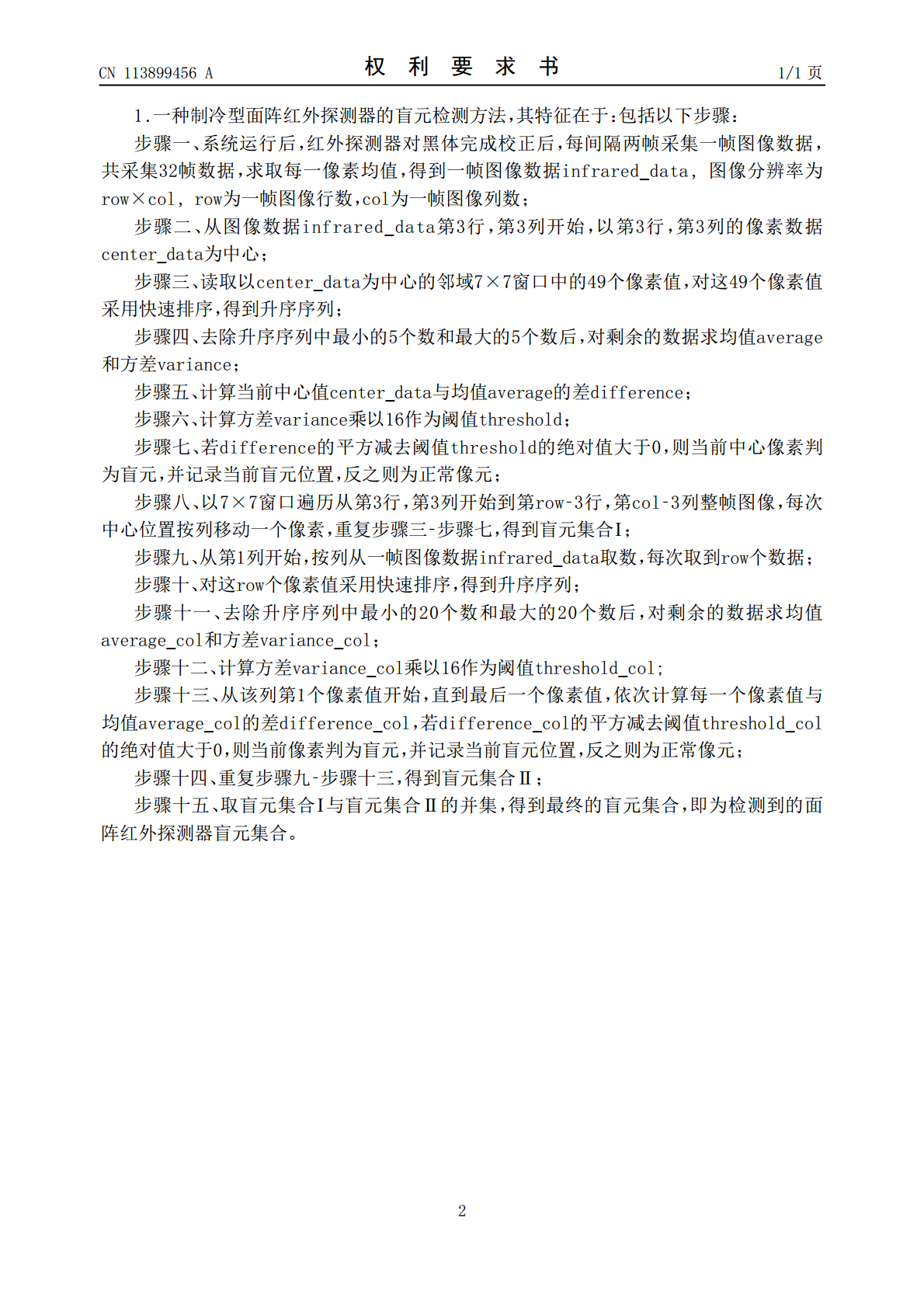
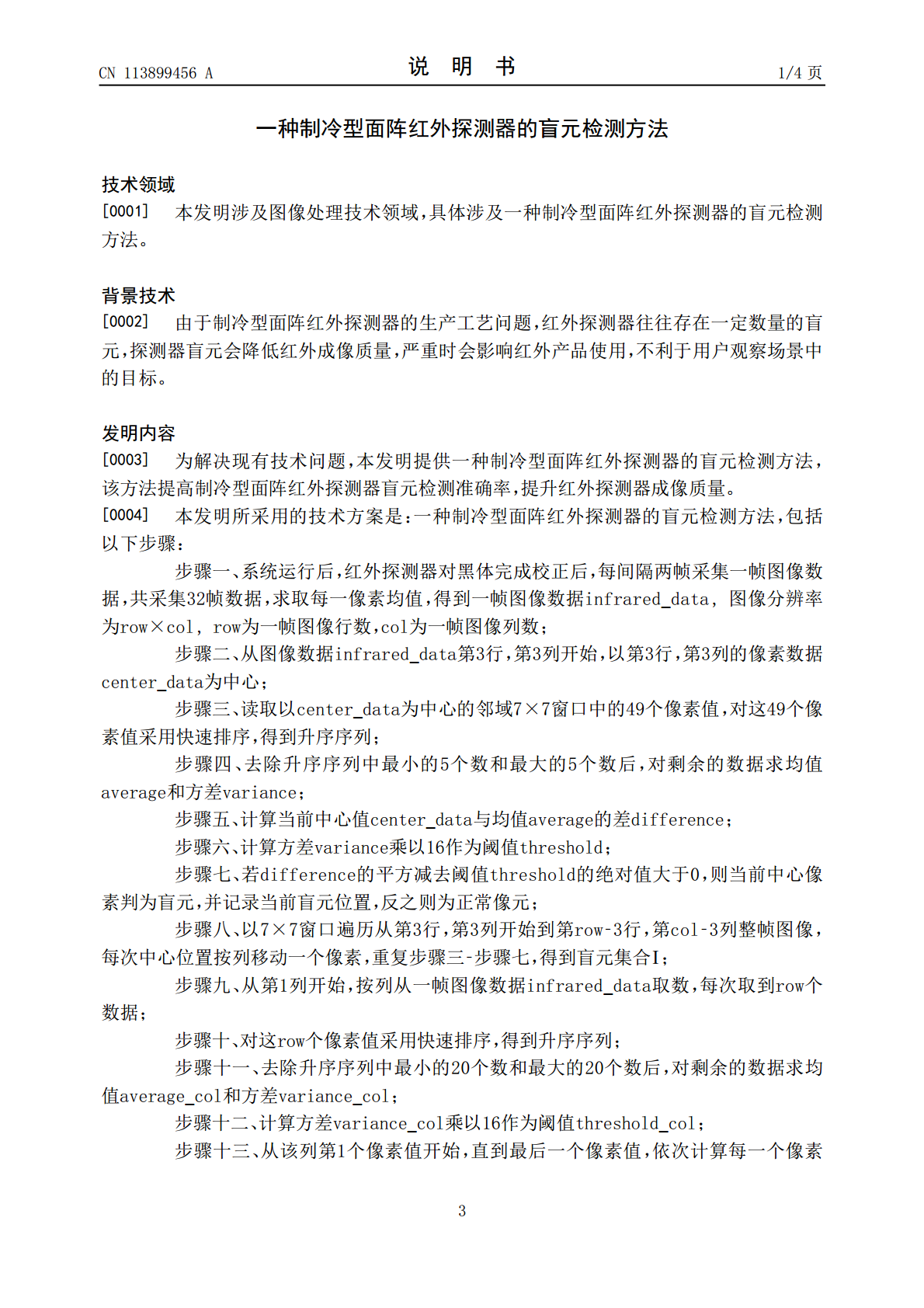
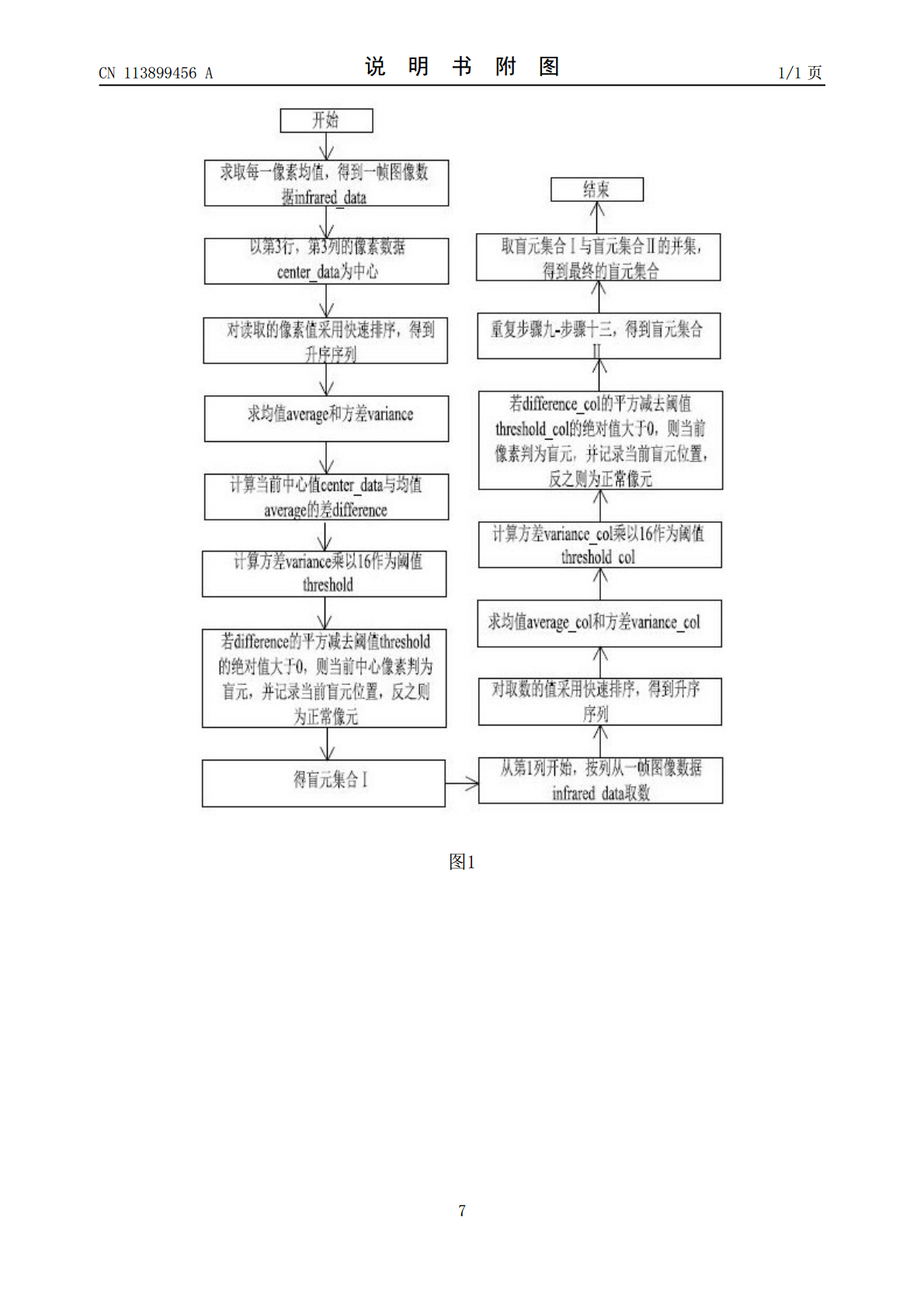
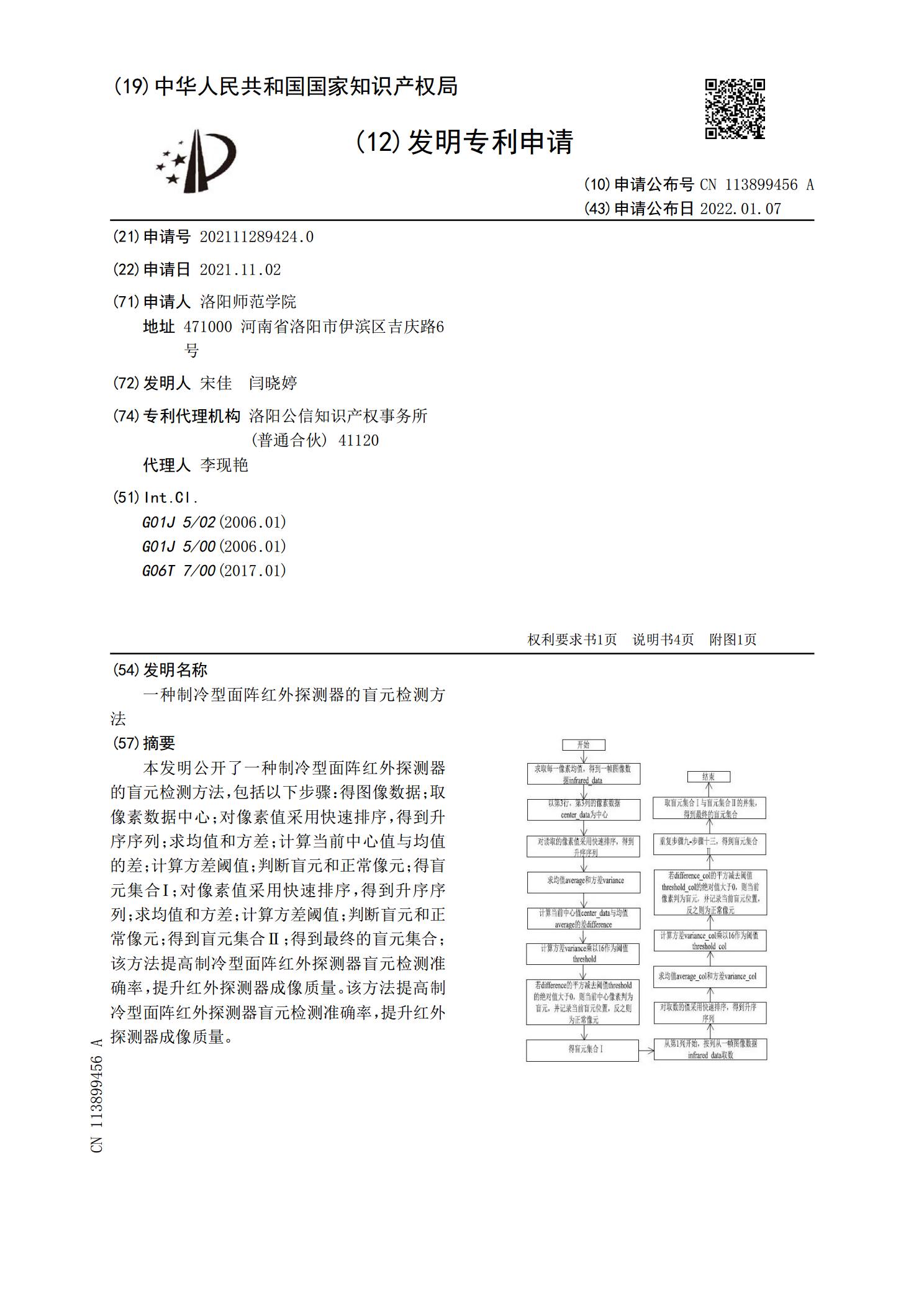
本发明公开了一种制冷型面阵红外探测器的盲元检测方法,包括以下步骤:得图像数据;取像素数据中心;对像素值采用快速排序,得到升序序列;求均值和方差;计算当前中心值与均值的差;计算方差阈值;判断盲元和正常像元;得盲元集合Ⅰ;对像素值采用快速排序,得到升序序列;求均值和方差;计算方差阈值;判断盲元和正常像元;得到盲元集合Ⅱ;得到最终的盲元集合;该方法提高制冷型面阵红外探测器盲元检测准确率,提升红外探测器成像质量。该方法提高制冷型面阵红外探测器盲元检测准确率,提升红外探测器成像质量。
一种面阵红外焦平面的盲元检测方法.pdf
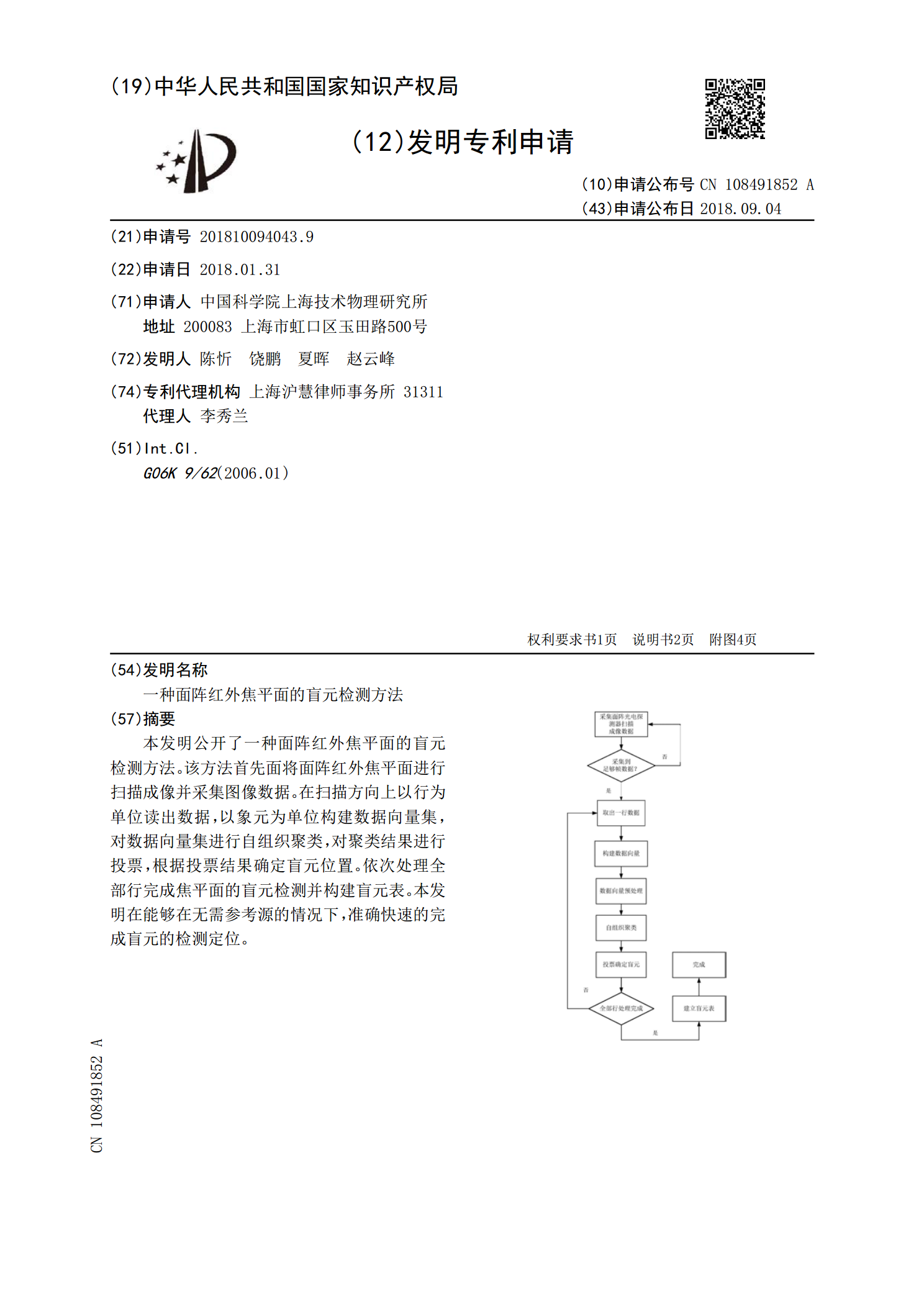
本发明公开了一种面阵红外焦平面的盲元检测方法。该方法首先面将面阵红外焦平面进行扫描成像并采集图像数据。在扫描方向上以行为单位读出数据,以象元为单位构建数据向量集,对数据向量集进行自组织聚类,对聚类结果进行投票,根据投票结果确定盲元位置。依次处理全部行完成焦平面的盲元检测并构建盲元表。本发明在能够在无需参考源的情况下,准确快速的完成盲元的检测定位。

一种红外探测器盲元检测方法.pdf
本发明公开了一种红外探测器盲元检测方法,包括如下步骤:对红外探测器阵列进行多个温度点处的标定;及计算红外探测器的响应曲线及其曲线参数的正态分布特性;并利用3分布检测盲元。所述的标定采用可控温度的黑体放置于红外摄像仪近焦距清晰成像处,并使所述黑体充满图像画面;接着,使所述黑体的温度稳定在既定温度,并记录所述黑体温度、及所述黑体在该温度下对应的红外热像仪输出图像。本发明根据红外探测器响应函数的正态分布特性进行盲元检测,克服了现有盲元检测算法中邻域受噪声、边缘分布影响、阈值设置的缺陷。且本发明算法简单、易实现、

一种红外探测器盲元检测系统及方法.pdf
本发明涉及一种红外探测器盲元检测系统及方法,方法包括以下步骤:步骤S1.进行红外线探测,生成红外探测数据;步骤S2.按设定的时间间隔对红外探测数据进行采集,根据采集的红外探测数据对应生成探测图像;步骤S3.对探测图像中的每一个像元进行奇异检测,并将每一个像元出现奇异的概率记录进奇异概率表;步骤S4.奇异概率表中奇异概率高于或等于设定值的像元为盲元,进行盲元补偿。本发明相比上门维修和用户自行标定的方式效率高,检测精度高,不易发生误判。

一种红外偏振探测器的盲元检测方法.pdf
本发明提出了一种红外偏振探测器的盲元检测方法,包括:采集偏振信息信号,其中偏振信息信号,是在不同温度条件下,由红外偏振探测器的不同像元响应于电动起偏器旋转至少两周的过程中所产生的;确定偏振信息信号对应的像元中的过热像元以及死像元;利用配置的消光比算法,确定偏振信息信号对应的像元中的偏振盲元;将过热像元,死像元,以及偏振盲元进行叠加统计,确定红外偏振探测器中的盲元。本发明提供的红外偏振探测器盲元的检测方法通过增加对偏振盲元的检测,可以更加准确的完成对偏振探测器盲元的评价。