
一种基于TOFD技术的精准扫查方法.pdf

一条****轩吗


1/10

2/10
3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于TOFD技术的精准扫查方法.pdf
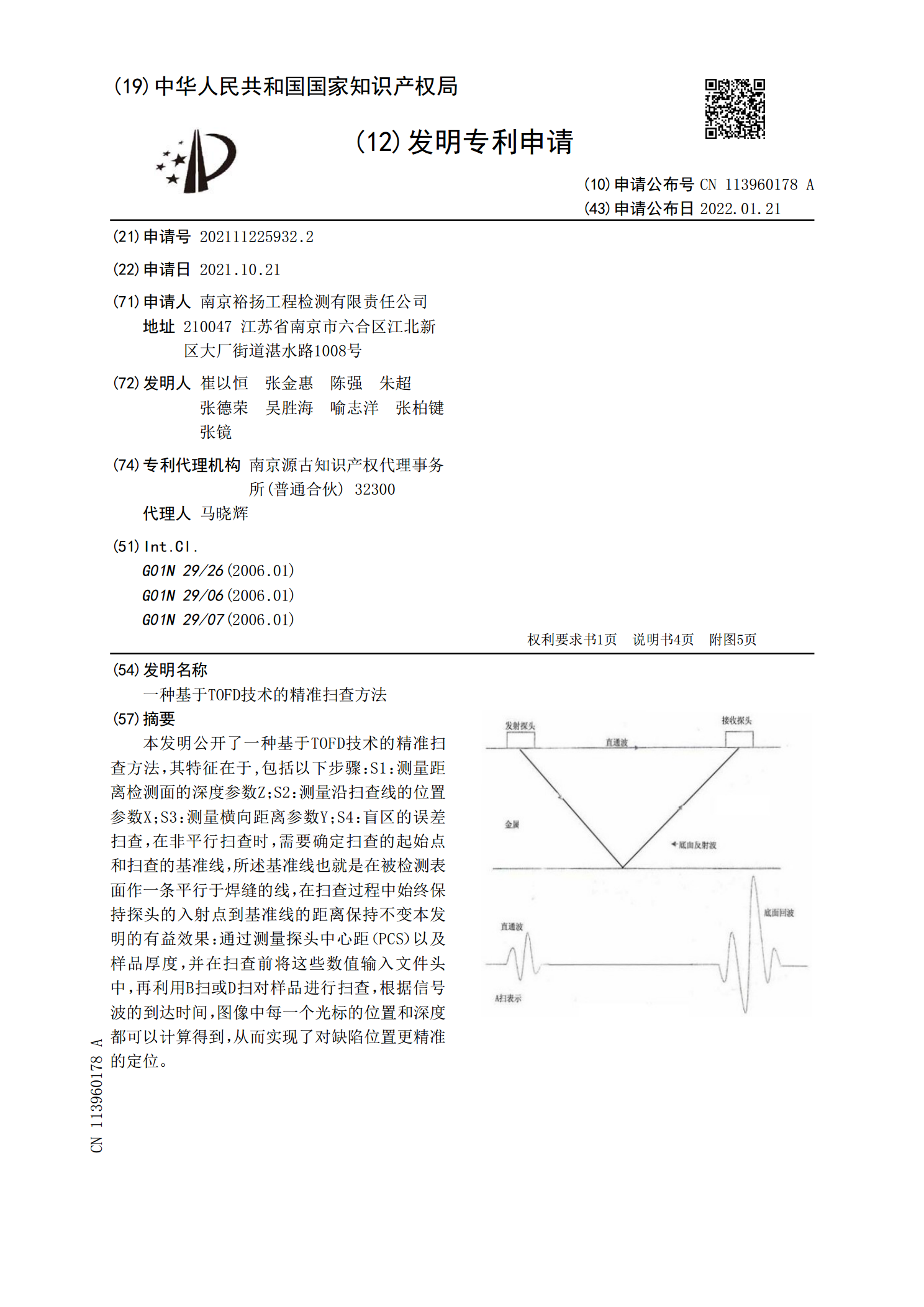
本发明公开了一种基于TOFD技术的精准扫查方法,其特征在于,包括以下步骤:S1:测量距离检测面的深度参数Z;S2:测量沿扫查线的位置参数X;S3:测量横向距离参数Y;S4:盲区的误差扫查,在非平行扫查时,需要确定扫查的起始点和扫查的基准线,所述基准线也就是在被检测表面作一条平行于焊缝的线,在扫查过程中始终保持探头的入射点到基准线的距离保持不变本发明的有益效果:通过测量探头中心距(PCS)以及样品厚度,并在扫查前将这些数值输入文件头中,再利用B扫或D扫对样品进行扫查,根据信号波的到达时间,图像中每一个光标的

基于TOFD周向扫查的厚壁管道倾斜裂纹精准定量.docx
基于TOFD周向扫查的厚壁管道倾斜裂纹精准定量基于TOFD周向扫查的厚壁管道倾斜裂纹精准定量摘要:随着工业化进程的不断推进,厚壁管道在工业生产中的应用越来越广泛。由于其承受的内外压力复杂多变,易受到应力和腐蚀的影响,导致倾斜裂纹的生成和扩展。为了保证厚壁管道的安全运行,准确判断倾斜裂纹的尺寸和位置变得至关重要。本文基于TOFD(TimeofFlightDiffraction)周向扫查的技术原理和应用研究,探讨了一种精准定量评估厚壁管道倾斜裂纹的方法。关键词:厚壁管道;倾斜裂纹;TOFD;定量评估一、引言厚

一种TOFD自动扫查装置.pdf
本发明公开的属于TOFD检测设备技术领域,具体为一种TOFD自动扫查装置,包括内部为中空结构的主梁,所述主梁的底部开有活动槽,所述主梁的顶部中央位置安装有齿轮箱,所述齿轮箱与主梁的内腔相连通,所述齿轮箱的内腔中央位置纵向设置有主动锥齿,所述齿轮箱的右侧安装有电机,所述电机的左侧动力输出端通过传动轴与主动锥齿的右侧固定连接,所述主动锥齿的底部啮合连接有从动锥齿,通过电机的旋转,即可实现对探头和滚轮之间的距离调节,且探头和滚轮之间能够实现联动,提高了检测效率,通过弧形支架和弹簧的设置,使得滚轮能够紧贴管壁,防

一种TOFD自动扫查装置.pdf
本发明公开了一种TOFD自动扫查装置,该TOFD自动扫查装置包括TOFD自动扫查框架,在该TOFD自动扫查框架的一侧设置有导轨和磁性轮,导轨中设置有第一探头支架、第二探头支架和第三探头支架,第一探头支架、第二探头支架和第三探头支架能够在导轨中左右滑动;第一探头支架的底部设置有TOFD发射探头,第二探头支架的底部设置有TOFD接收探头,第三探头支架的底部设置有相控探头。该TOFD自动扫查装置采用TOFD发射探头和TOFD接收探头与相控探头共同作用,将所需的检测空间由现有技术中的110mm减小为仅需12mm,

基于TOFD周向扫查图像特征的管道缺陷超声检测.docx
基于TOFD周向扫查图像特征的管道缺陷超声检测基于TOFD周向扫查图像特征的管道缺陷超声检测摘要:管道缺陷的超声检测是工业领域中广泛应用的一种非破坏性检测技术。TOFD(Time-Of-FlightDiffraction)是一种基于超声波的成像技术,通过周向扫查的图像特征可以有效地检测管道中的缺陷。本文对TOFD周向扫查图像特征的管道缺陷超声检测进行了研究和分析。1.介绍管道的缺陷检测十分重要,因为它们可能导致泄漏、爆炸甚至灾难性事故。超声检测是一种非破坏性的方法,可以对管道进行快速而准确的检测。TOFD