
一种盲区预警方法、装置、电子设备以及存储介质.pdf

Ro****44

1/10

2/10

3/10
4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种盲区预警方法、装置、电子设备以及存储介质.pdf
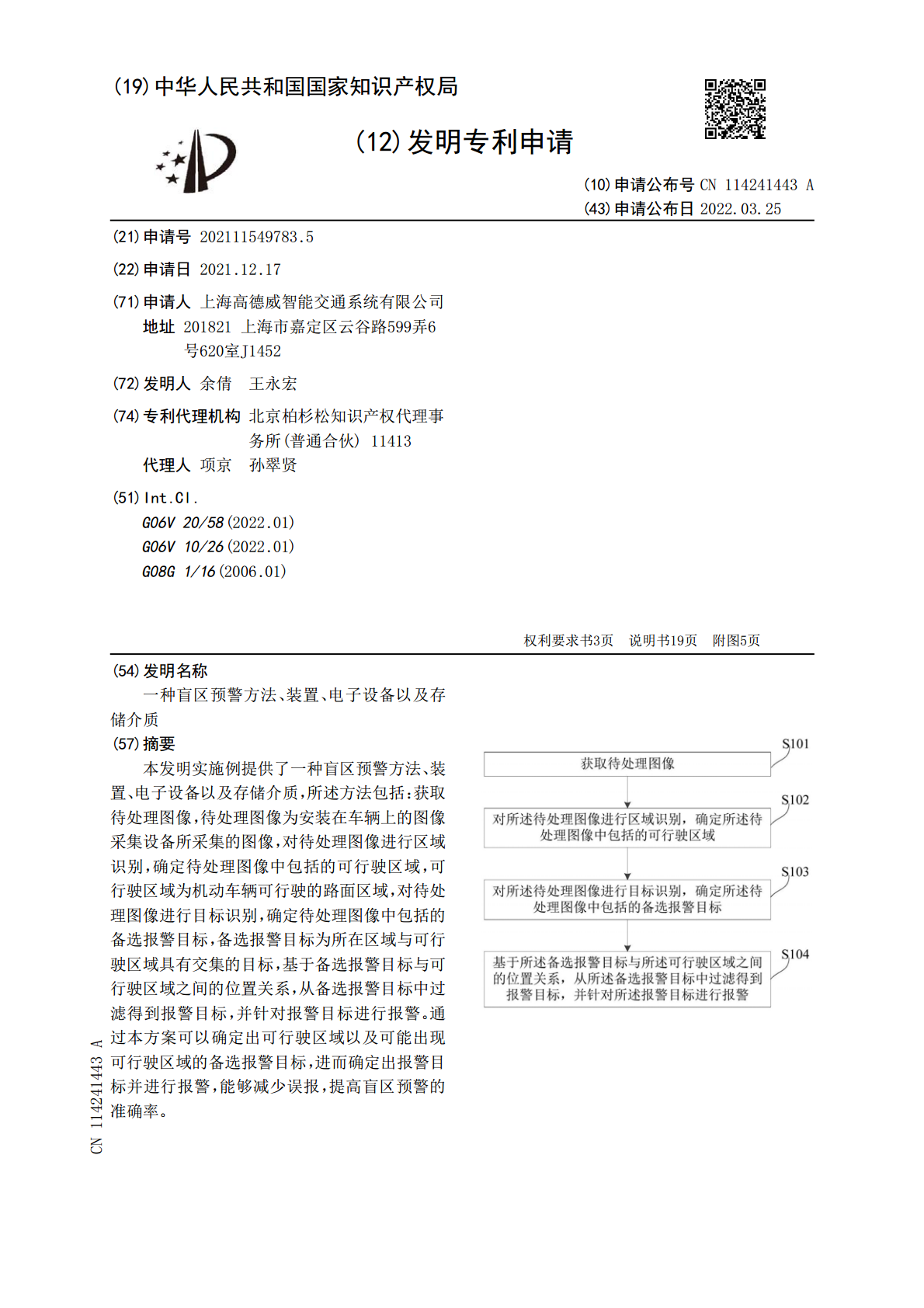
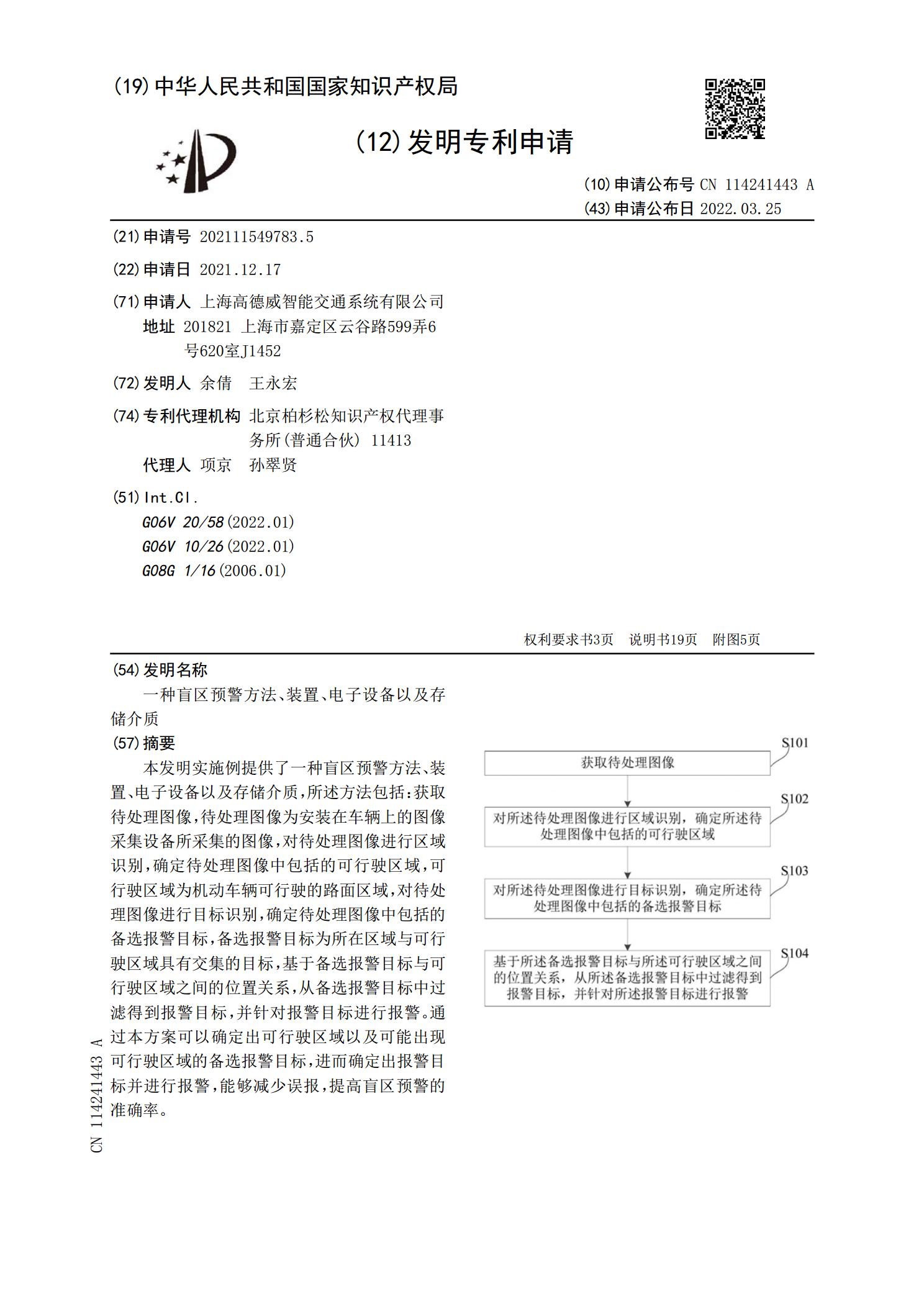
本发明实施例提供了一种盲区预警方法、装置、电子设备以及存储介质,所述方法包括:获取待处理图像,待处理图像为安装在车辆上的图像采集设备所采集的图像,对待处理图像进行区域识别,确定待处理图像中包括的可行驶区域,可行驶区域为机动车辆可行驶的路面区域,对待处理图像进行目标识别,确定待处理图像中包括的备选报警目标,备选报警目标为所在区域与可行驶区域具有交集的目标,基于备选报警目标与可行驶区域之间的位置关系,从备选报警目标中过滤得到报警目标,并针对报警目标进行报警。通过本方案可以确定出可行驶区域以及可能出现可行驶区域
一种车辆预警方法、装置、电子设备以及存储介质.pdf
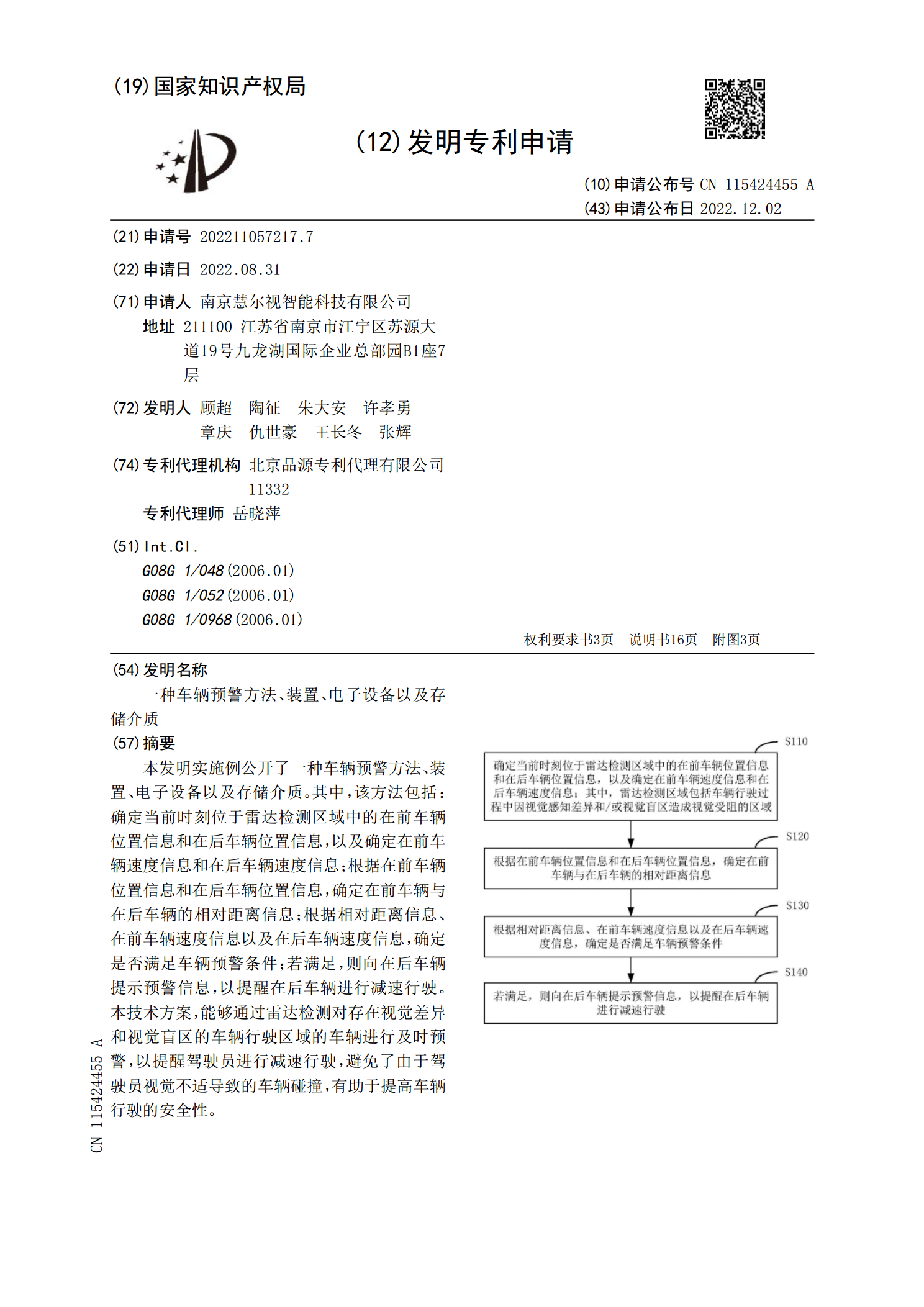
本发明实施例公开了一种车辆预警方法、装置、电子设备以及存储介质。其中,该方法包括:确定当前时刻位于雷达检测区域中的在前车辆位置信息和在后车辆位置信息,以及确定在前车辆速度信息和在后车辆速度信息;根据在前车辆位置信息和在后车辆位置信息,确定在前车辆与在后车辆的相对距离信息;根据相对距离信息、在前车辆速度信息以及在后车辆速度信息,确定是否满足车辆预警条件;若满足,则向在后车辆提示预警信息,以提醒在后车辆进行减速行驶。本技术方案,能够通过雷达检测对存在视觉差异和视觉盲区的车辆行驶区域的车辆进行及时预警,以提醒驾
一种驾驶预警方法、装置、电子设备以及存储介质.pdf
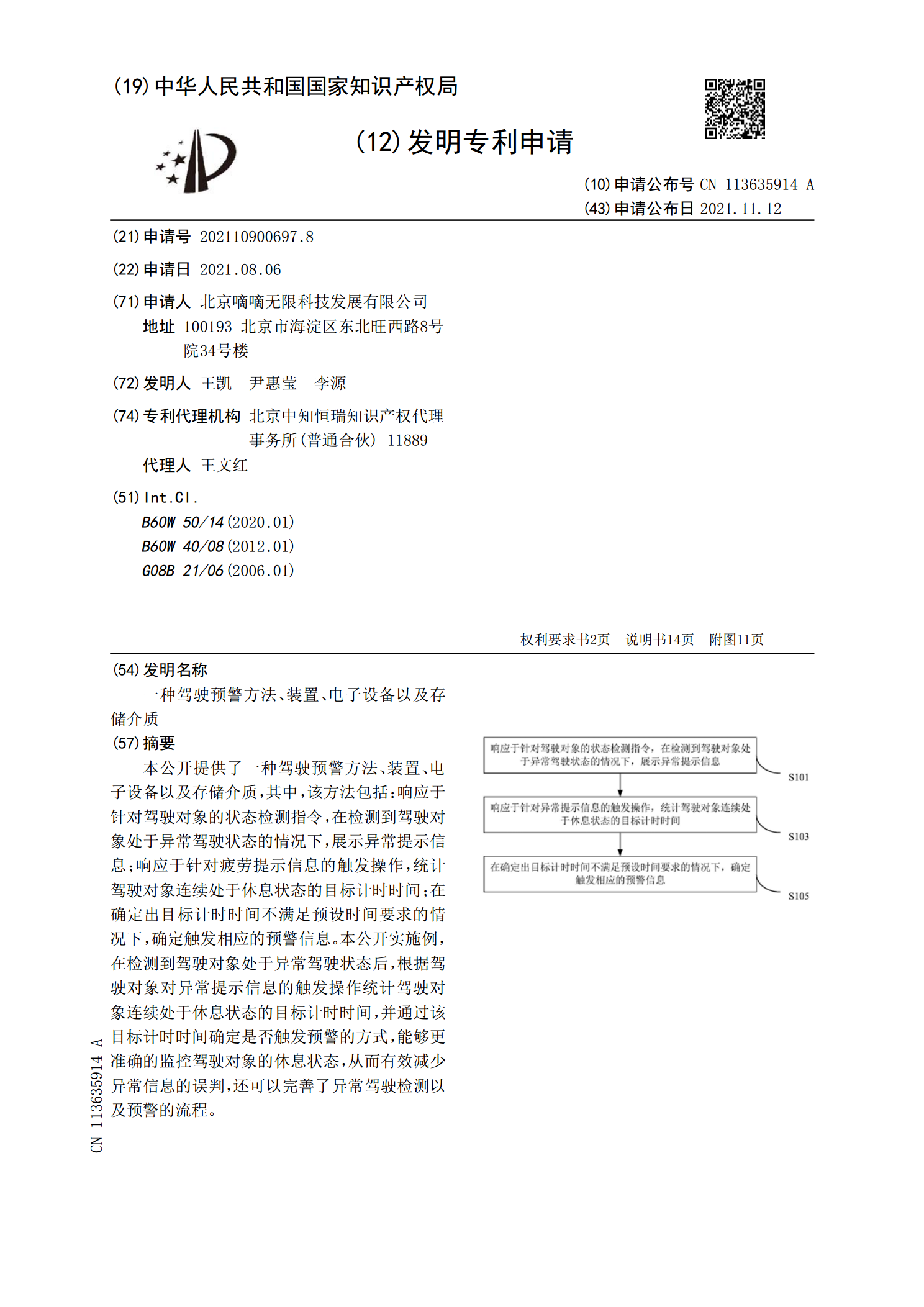
本公开提供了一种驾驶预警方法、装置、电子设备以及存储介质,其中,该方法包括:响应于针对驾驶对象的状态检测指令,在检测到驾驶对象处于异常驾驶状态的情况下,展示异常提示信息;响应于针对疲劳提示信息的触发操作,统计驾驶对象连续处于休息状态的目标计时时间;在确定出目标计时时间不满足预设时间要求的情况下,确定触发相应的预警信息。本公开实施例,在检测到驾驶对象处于异常驾驶状态后,根据驾驶对象对异常提示信息的触发操作统计驾驶对象连续处于休息状态的目标计时时间,并通过该目标计时时间确定是否触发预警的方式,能够更准确的监控
一种盲区监测方法、装置、电子设备及存储介质.pdf
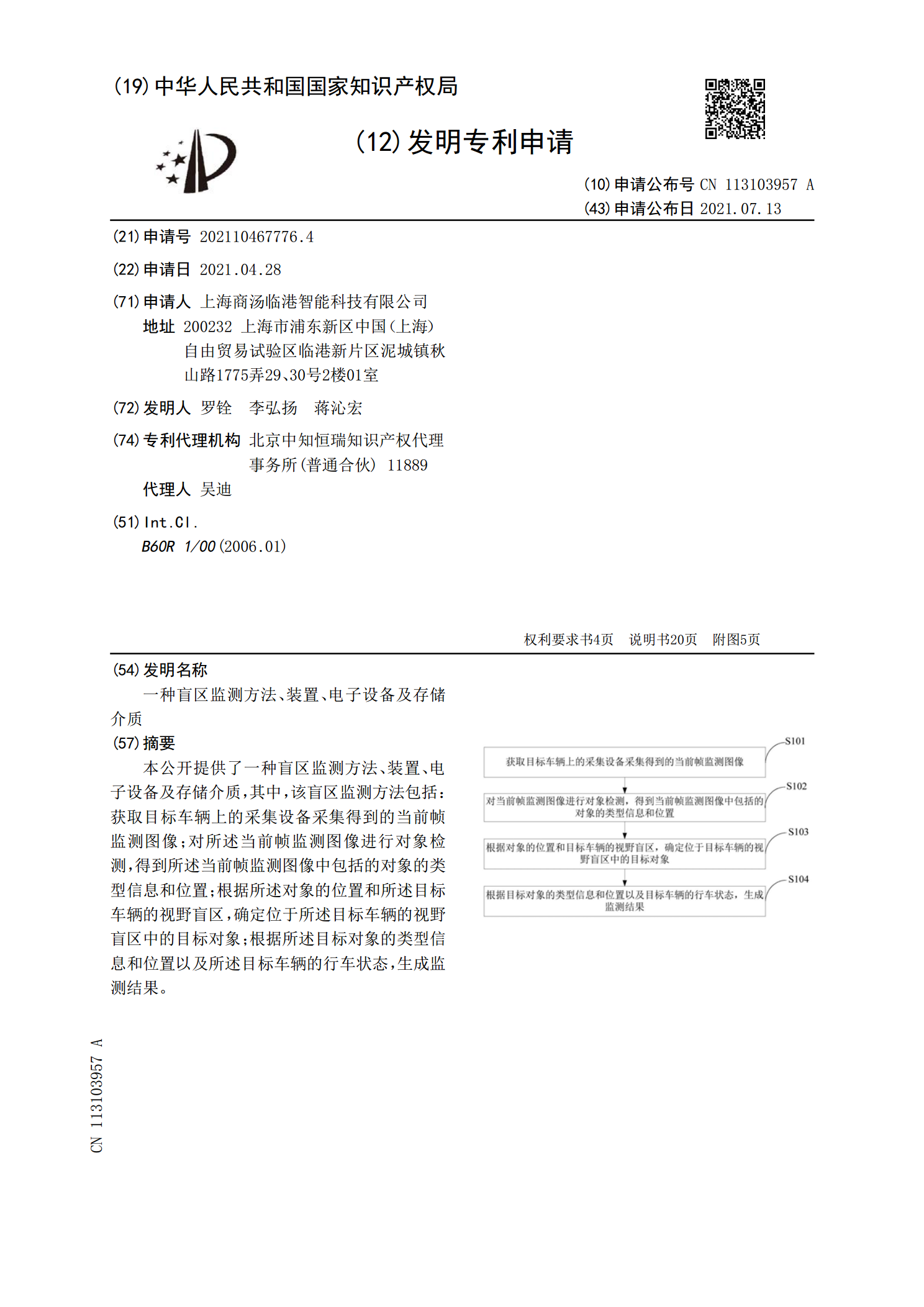
本公开提供了一种盲区监测方法、装置、电子设备及存储介质,其中,该盲区监测方法包括:获取目标车辆上的采集设备采集得到的当前帧监测图像;对所述当前帧监测图像进行对象检测,得到所述当前帧监测图像中包括的对象的类型信息和位置;根据所述对象的位置和所述目标车辆的视野盲区,确定位于所述目标车辆的视野盲区中的目标对象;根据所述目标对象的类型信息和位置以及所述目标车辆的行车状态,生成监测结果。
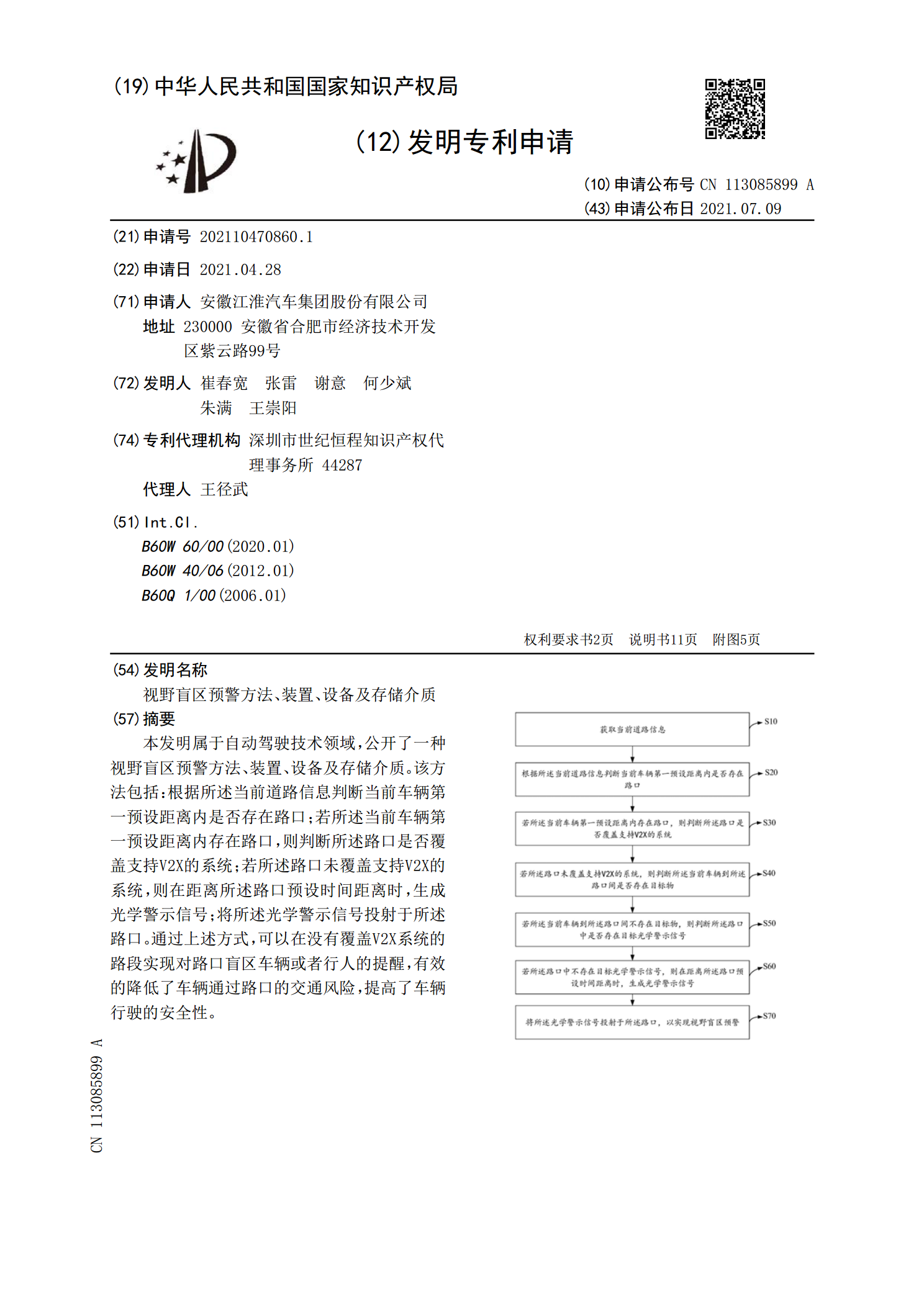
视野盲区预警方法、装置、设备及存储介质.pdf
本发明属于自动驾驶技术领域,公开了一种视野盲区预警方法、装置、设备及存储介质。该方法包括:根据所述当前道路信息判断当前车辆第一预设距离内是否存在路口;若所述当前车辆第一预设距离内存在路口,则判断所述路口是否覆盖支持V2X的系统;若所述路口未覆盖支持V2X的系统,则在距离所述路口预设时间距离时,生成光学警示信号;将所述光学警示信号投射于所述路口。通过上述方式,可以在没有覆盖V2X系统的路段实现对路口盲区车辆或者行人的提醒,有效的降低了车辆通过路口的交通风险,提高了车辆行驶的安全性。