
动态避障方法、装置及清洁机器人.pdf

一条****88


1/10

2/10

3/10

4/10

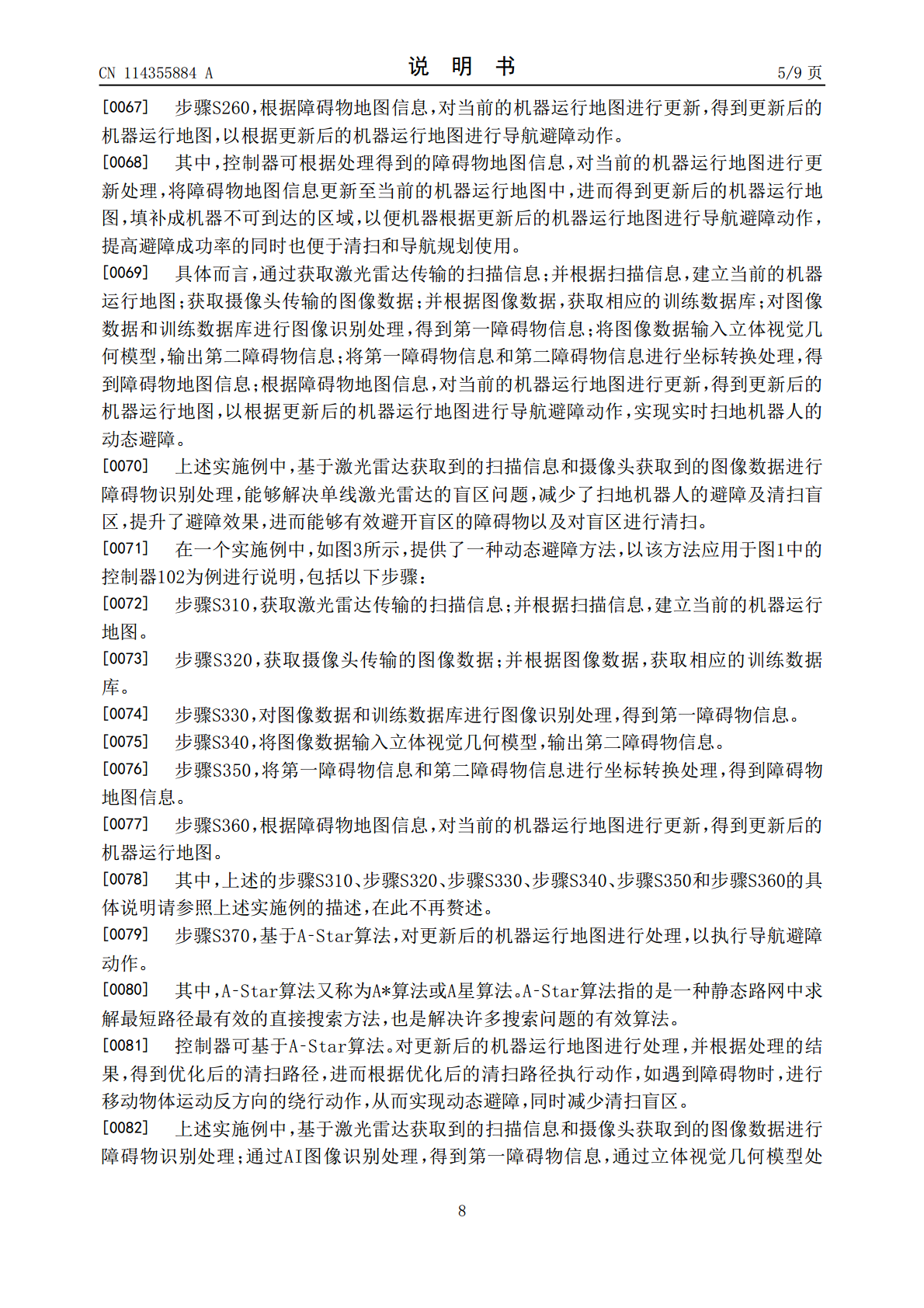
5/10
6/10

7/10
8/10
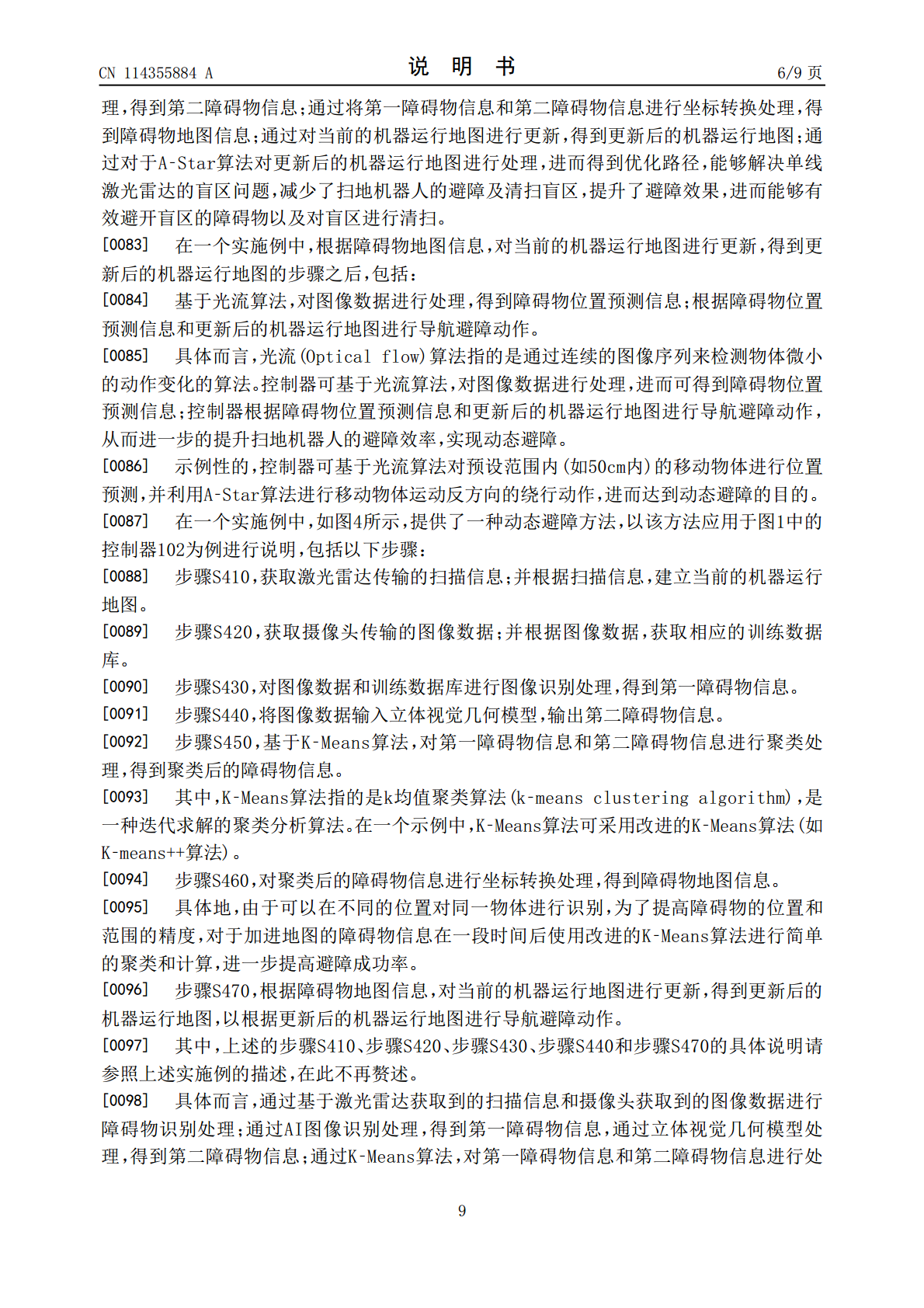
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
动态避障方法、装置及清洁机器人.pdf
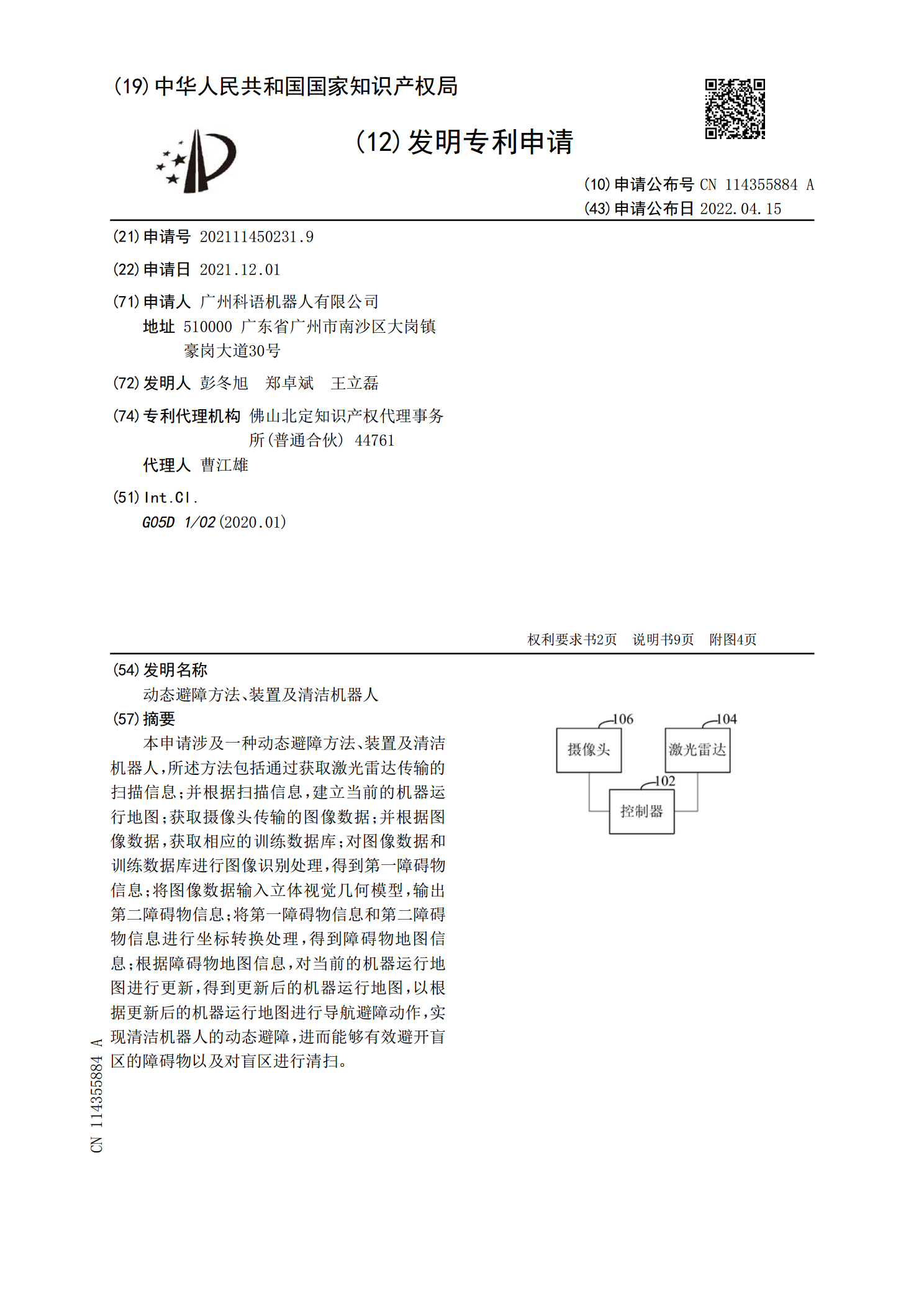
本申请涉及一种动态避障方法、装置及清洁机器人,所述方法包括通过获取激光雷达传输的扫描信息;并根据扫描信息,建立当前的机器运行地图;获取摄像头传输的图像数据;并根据图像数据,获取相应的训练数据库;对图像数据和训练数据库进行图像识别处理,得到第一障碍物信息;将图像数据输入立体视觉几何模型,输出第二障碍物信息;将第一障碍物信息和第二障碍物信息进行坐标转换处理,得到障碍物地图信息;根据障碍物地图信息,对当前的机器运行地图进行更新,得到更新后的机器运行地图,以根据更新后的机器运行地图进行导航避障动作,实现清洁机器人

清洁机器人及其避障方法.pdf
本申请实施例提供一种清洁机器人及其避障方法。清洁机器人包括主机以及设置在主机面板上的空间感测模块和避障感测模块,空间感测模块可识别工作环境中当前场景的空间大小,以判断主机是否能在此空间内行进,避障感测模块可提供第一视角感测范围和第二视角感测范围,并探测是否存在障碍物,消除第一视角感测范围的视野盲区,让主机能够无死角无障碍的执行清洁任务,从而消除任务执行时的不确定性,满足用户需求。
一种机器人动态避障方法、装置和机器人.pdf
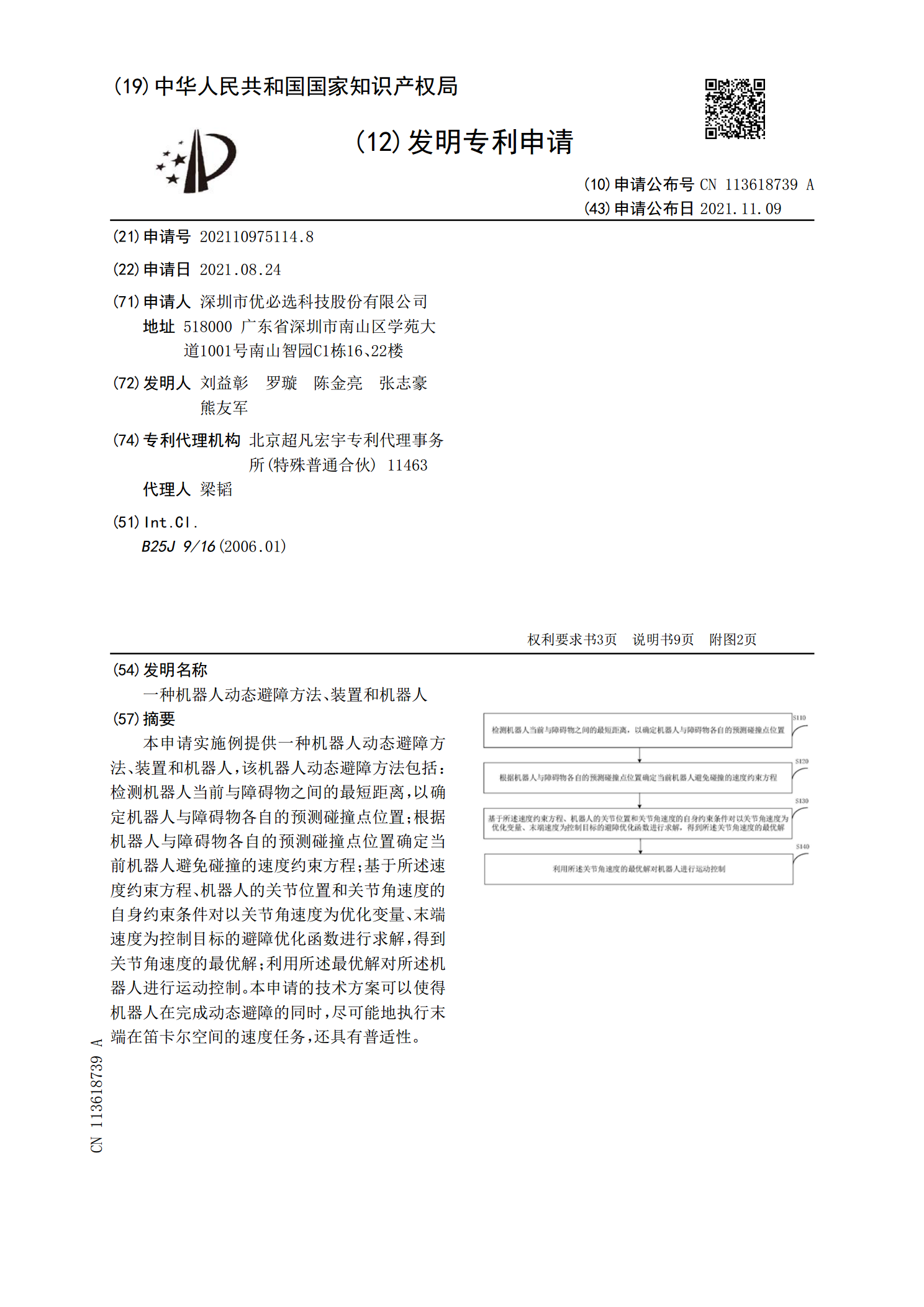
本申请实施例提供一种机器人动态避障方法、装置和机器人,该机器人动态避障方法包括:检测机器人当前与障碍物之间的最短距离,以确定机器人与障碍物各自的预测碰撞点位置;根据机器人与障碍物各自的预测碰撞点位置确定当前机器人避免碰撞的速度约束方程;基于所述速度约束方程、机器人的关节位置和关节角速度的自身约束条件对以关节角速度为优化变量、末端速度为控制目标的避障优化函数进行求解,得到关节角速度的最优解;利用所述最优解对所述机器人进行运动控制。本申请的技术方案可以使得机器人在完成动态避障的同时,尽可能地执行末端在笛卡尔空
一种飞行机器人避障装置及飞行机器人的避障方法.pdf
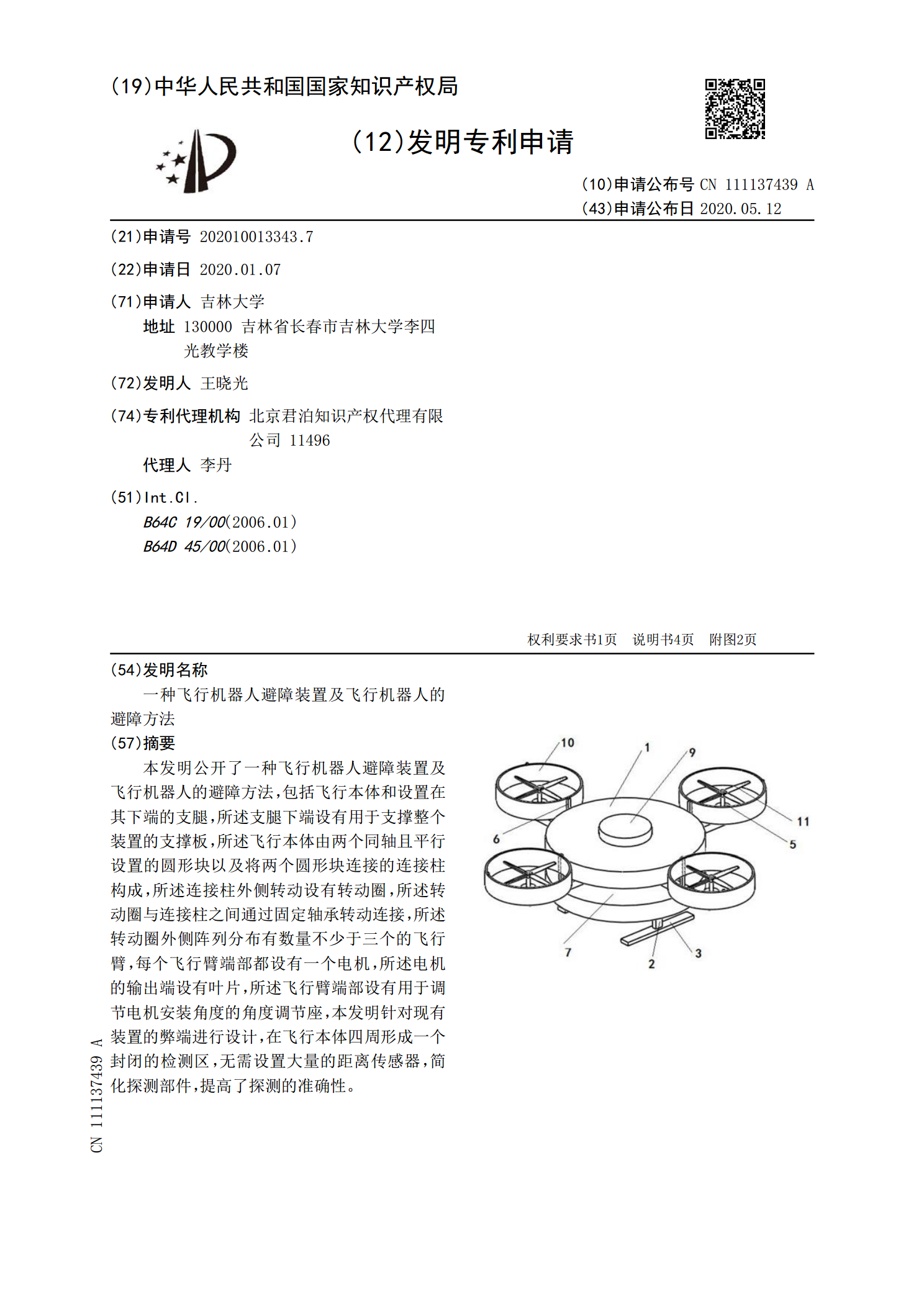
本发明公开了一种飞行机器人避障装置及飞行机器人的避障方法,包括飞行本体和设置在其下端的支腿,所述支腿下端设有用于支撑整个装置的支撑板,所述飞行本体由两个同轴且平行设置的圆形块以及将两个圆形块连接的连接柱构成,所述连接柱外侧转动设有转动圈,所述转动圈与连接柱之间通过固定轴承转动连接,所述转动圈外侧阵列分布有数量不少于三个的飞行臂,每个飞行臂端部都设有一个电机,所述电机的输出端设有叶片,所述飞行臂端部设有用于调节电机安装角度的角度调节座,本发明针对现有装置的弊端进行设计,在飞行本体四周形成一个封闭的检测区,无

一种传感装置、清洁机器人及清洁机器人的避障方法.pdf
本发明实施例提供了一种传感装置、清洁机器人及清洁机器人的避障方法,用于提升清洁机器人的避障能力。本发明实施例中的传感装置包括:结构光测距传感器、图像传感器和处理器,其中,所述结构光测距传感器包含至少一个发射器和至少一个接收器,用于通过所述至少一个接收器接收所述至少一个发射器发射的结构光入射到障碍物上生成的反射光信号,并根据所述反射光信号获取测距信息,所述图像传感器和所述至少一个发射器相邻设置,所述图像传感器用于获取所述至少一个发射器所发射的结构光入射到障碍物上生成的反射光信号的图像特征,处理器根据反射光信