
基于机器学习的多智能体感知融合系统及其实现方法.pdf

书生****aa


1/10
2/10

3/10

4/10
5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于机器学习的多智能体感知融合系统及其实现方法.pdf
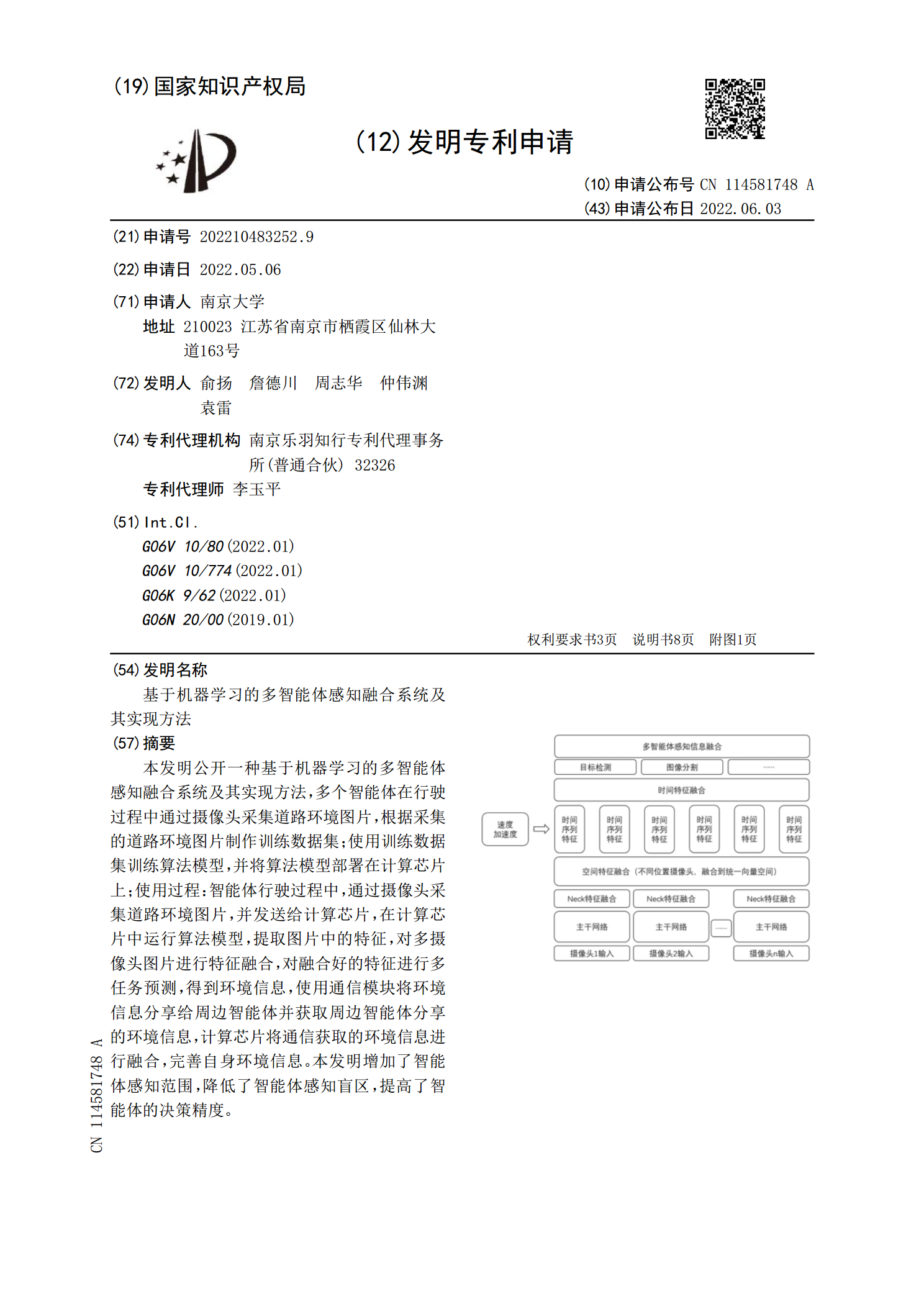
本发明公开一种基于机器学习的多智能体感知融合系统及其实现方法,多个智能体在行驶过程中通过摄像头采集道路环境图片,根据采集的道路环境图片制作训练数据集;使用训练数据集训练算法模型,并将算法模型部署在计算芯片上;使用过程:智能体行驶过程中,通过摄像头采集道路环境图片,并发送给计算芯片,在计算芯片中运行算法模型,提取图片中的特征,对多摄像头图片进行特征融合,对融合好的特征进行多任务预测,得到环境信息,使用通信模块将环境信息分享给周边智能体并获取周边智能体分享的环境信息,计算芯片将通信获取的环境信息进行融合,完善
基于多智能体强化学习的效用感知的协作服务缓存方法.pdf
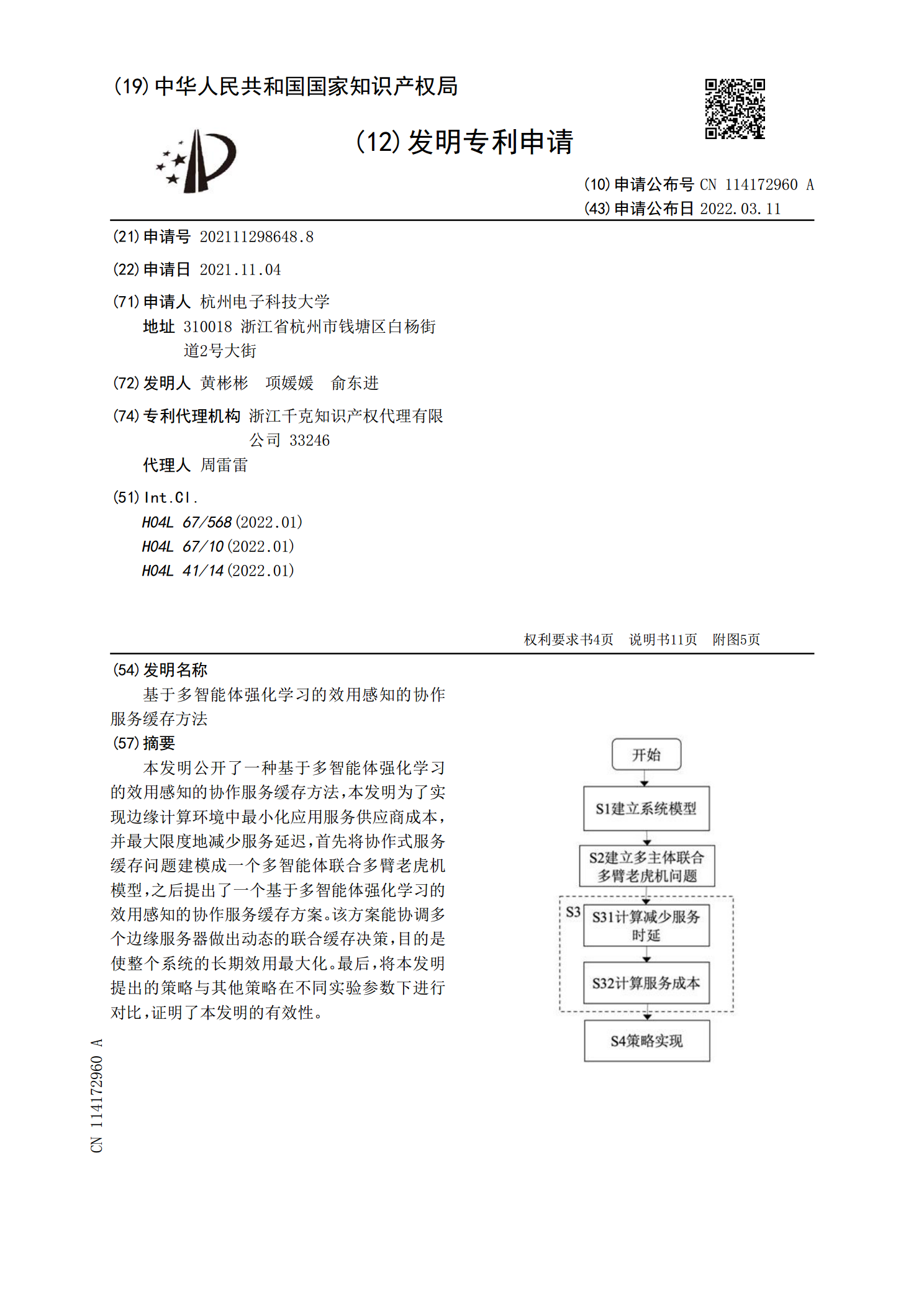
本发明公开了一种基于多智能体强化学习的效用感知的协作服务缓存方法,本发明为了实现边缘计算环境中最小化应用服务供应商成本,并最大限度地减少服务延迟,首先将协作式服务缓存问题建模成一个多智能体联合多臂老虎机模型,之后提出了一个基于多智能体强化学习的效用感知的协作服务缓存方案。该方案能协调多个边缘服务器做出动态的联合缓存决策,目的是使整个系统的长期效用最大化。最后,将本发明提出的策略与其他策略在不同实验参数下进行对比,证明了本发明的有效性。

基于多智能体的供应链报价协商系统及其实现.docx
基于多智能体的供应链报价协商系统及其实现摘要:随着供应链的不断发展,报价协商成为了供应链管理中的重要环节。多智能体技术为报价协商提供了新的思路和方法。本文提出了一个基于多智能体的供应链报价协商系统,包括智能体的设计和实现、交互协议的制定和实现以及系统的性能测试等方面的内容。该系统通过实现协商的过程,帮助参与者更好地理解市场和自身定位,获得更好的合作结果。经过测试,该系统具有较高的效率和稳定性,可推广于实际的供应链管理中。关键词:供应链,报价协商,多智能体,交互协议,性能测试1.引言随着全球化进程的加速和市

基于多源异构感知数据融合的消防系统的设计与实现.docx
基于多源异构感知数据融合的消防系统的设计与实现摘要本文提出了一种基于多源异构感知数据融合的消防系统的设计与实现。该系统利用不同类型、不同位置的传感器获取多源感知数据,通过融合算法将这些数据整合起来,提高了消防系统的准确度和效率。具体实现包括传感器网络的搭建、数据采集与处理、融合算法的设计和系统验证实验等方面。实验证明,采用多源异构感知数据融合的消防系统具有更高的准确度、更快的响应速度和更高的效率,为消防安全提供了更可靠的保障。关键词:多源异构感知数据;消防系统;融合算法;传感器网络;效率引言消防安全对于人
一种多智能体攀爬机器人系统及其控制方法.pdf
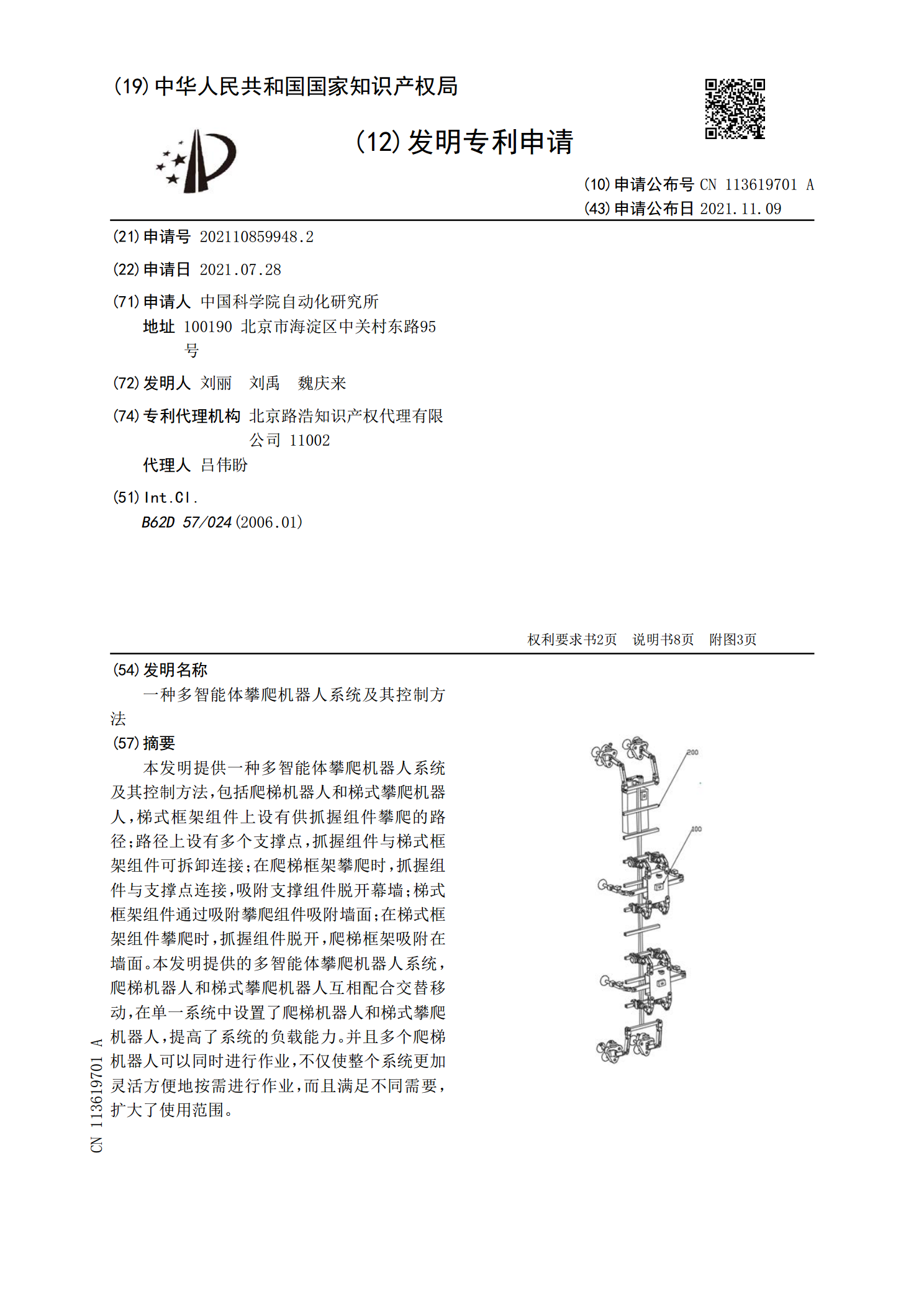
本发明提供一种多智能体攀爬机器人系统及其控制方法,包括爬梯机器人和梯式攀爬机器人,梯式框架组件上设有供抓握组件攀爬的路径;路径上设有多个支撑点,抓握组件与梯式框架组件可拆卸连接;在爬梯框架攀爬时,抓握组件与支撑点连接,吸附支撑组件脱开幕墙;梯式框架组件通过吸附攀爬组件吸附墙面;在梯式框架组件攀爬时,抓握组件脱开,爬梯框架吸附在墙面。本发明提供的多智能体攀爬机器人系统,爬梯机器人和梯式攀爬机器人互相配合交替移动,在单一系统中设置了爬梯机器人和梯式攀爬机器人,提高了系统的负载能力。并且多个爬梯机器人可以同时进