
车辆盲点监测雷达无依托标定方法.pdf

小琛****82

1/10
2/10
3/10

4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆盲点监测雷达无依托标定方法.pdf
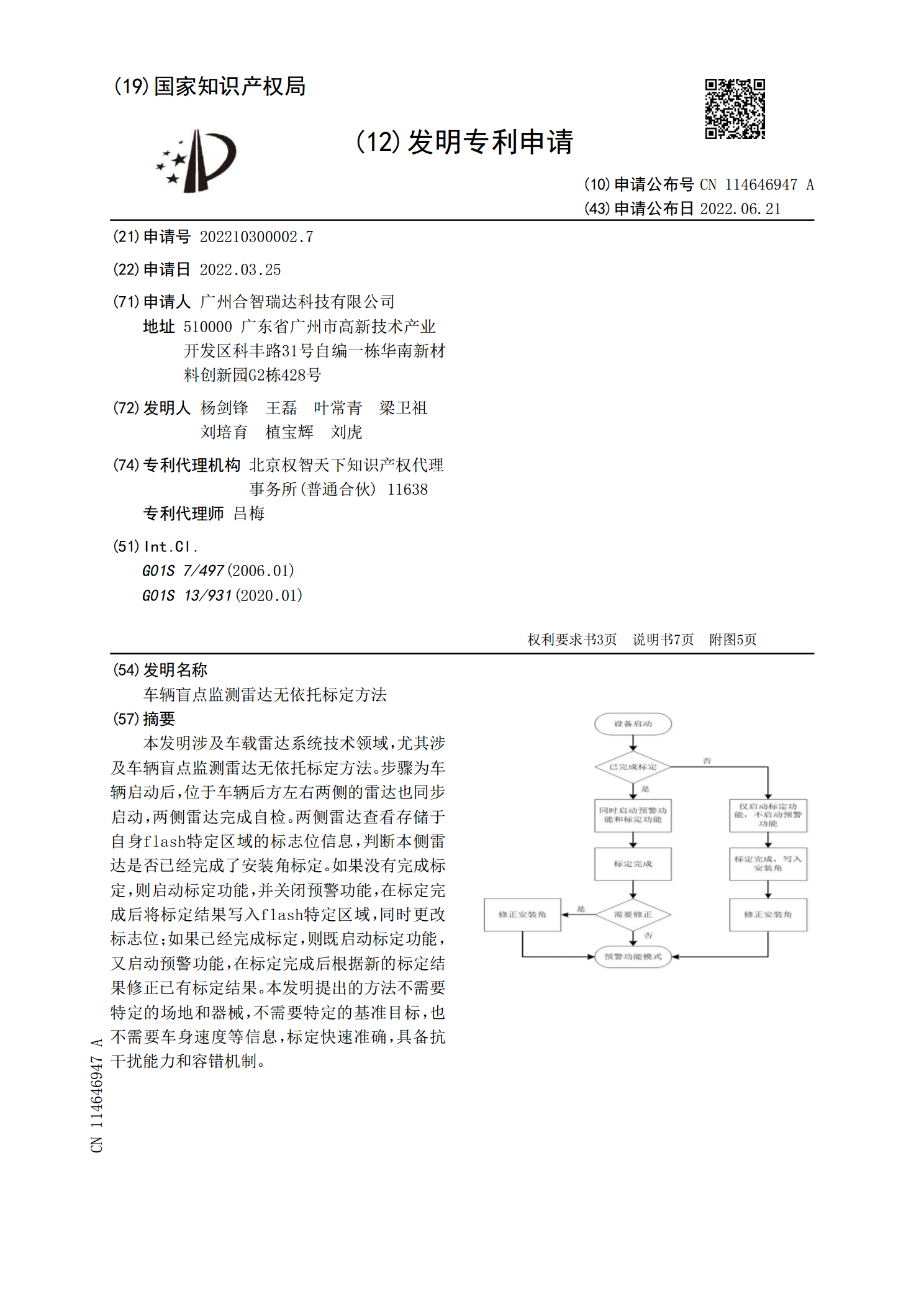
本发明涉及车载雷达系统技术领域,尤其涉及车辆盲点监测雷达无依托标定方法。步骤为车辆启动后,位于车辆后方左右两侧的雷达也同步启动,两侧雷达完成自检。两侧雷达查看存储于自身flash特定区域的标志位信息,判断本侧雷达是否已经完成了安装角标定。如果没有完成标定,则启动标定功能,并关闭预警功能,在标定完成后将标定结果写入flash特定区域,同时更改标志位;如果已经完成标定,则既启动标定功能,又启动预警功能,在标定完成后根据新的标定结果修正已有标定结果。本发明提出的方法不需要特定的场地和器械,不需要特定的基准目标,
汽车微波雷达盲点监测系统的标定方法.pdf
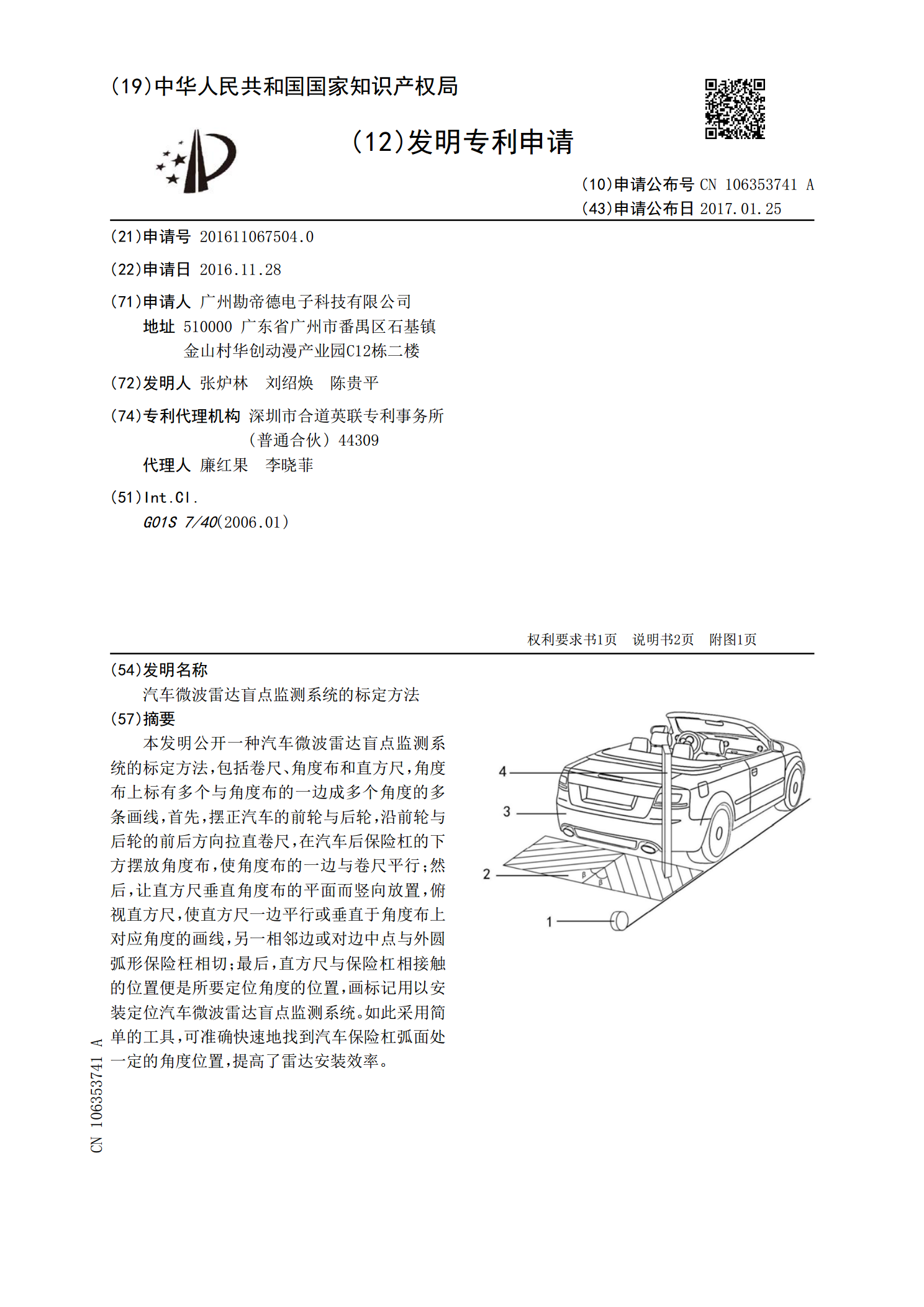
本发明公开一种汽车微波雷达盲点监测系统的标定方法,包括卷尺、角度布和直方尺,角度布上标有多个与角度布的一边成多个角度的多条画线,首先,摆正汽车的前轮与后轮,沿前轮与后轮的前后方向拉直卷尺,在汽车后保险杠的下方摆放角度布,使角度布的一边与卷尺平行;然后,让直方尺垂直角度布的平面而竖向放置,俯视直方尺,使直方尺一边平行或垂直于角度布上对应角度的画线,另一相邻边或对边中点与外圆弧形保险枉相切;最后,直方尺与保险杠相接触的位置便是所要定位角度的位置,画标记用以安装定位汽车微波雷达盲点监测系统。如此采用简单的工具,
基于雷达传感的超车盲点监测方法.pdf
本发明公开了一种基于雷达传感的超车盲点监测方法,首先在车的左后视镜上设置第一雷达传感器和第一超车指示灯,在车的右后视镜上设置第二雷达传感器和第二超车指示灯;然后获取车辆转向灯的状态;在转向灯打开时,获取转向灯打开方向雷达传感器获取的障碍物和汽车之间的距离,判断是否能够安全超车,并采用相应的超车指示灯来表示。本发明通过监视驾驶者难以看见的区域来缓解其大部分压力和避免危险情况的发生,使得驾驶者的注意力放在前方,极大的提高了行车安全系数。
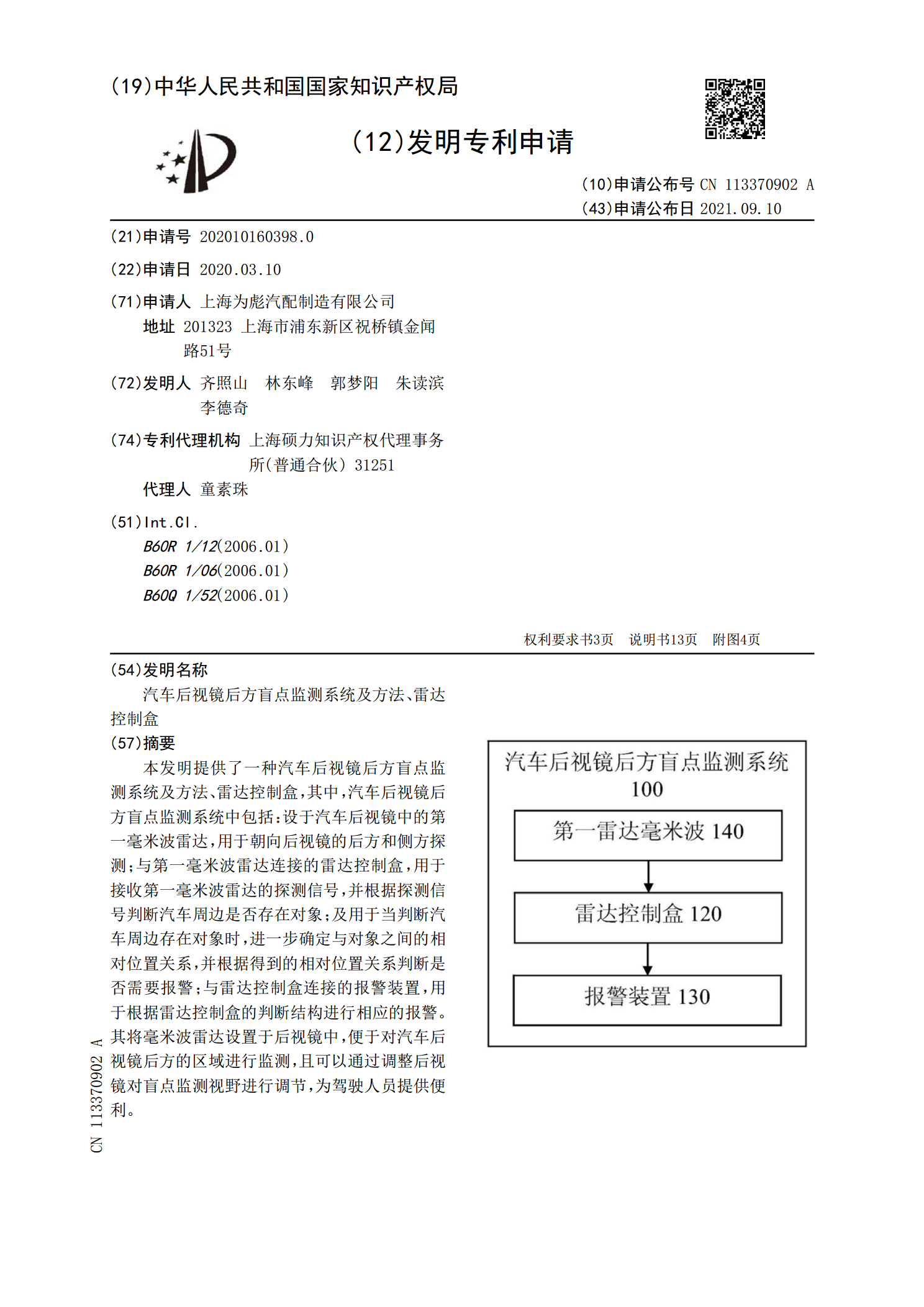
汽车后视镜后方盲点监测系统及方法、雷达控制盒.pdf
本发明提供了一种汽车后视镜后方盲点监测系统及方法、雷达控制盒,其中,汽车后视镜后方盲点监测系统中包括:设于汽车后视镜中的第一毫米波雷达,用于朝向后视镜的后方和侧方探测;与第一毫米波雷达连接的雷达控制盒,用于接收第一毫米波雷达的探测信号,并根据探测信号判断汽车周边是否存在对象;及用于当判断汽车周边存在对象时,进一步确定与对象之间的相对位置关系,并根据得到的相对位置关系判断是否需要报警;与雷达控制盒连接的报警装置,用于根据雷达控制盒的判断结构进行相应的报警。其将毫米波雷达设置于后视镜中,便于对汽车后视镜后方的

车载雷达自动标定方法、具有辅助驾驶功能的车辆和雷达.pdf
本发明涉及一种车辆,其角雷达预存有唯一序列号和多个通信识别码,可进行通信识别码的自动分配:通过随机使用多个通信识别码中的一个向所述控制主机发送信息以实现与控制主机绑定的方式确定每个角雷达的固定通信识别码、以及位置自动识别:根据车辆档位、车速、方向角信息,结合自身检测到的目标的速度、方位角信息确定自身安装位置并存储该安装位置。本发明的车载雷达自动标定方法可在雷达装配到车上后自动分配通信识别码(通信ID)、自动进行安装位置识别,从而可实现无差别生产和装配角雷达,节省人力和物料成本、减少生产和装配环节的管控成本