
一种车载大车全盲区预警系统.pdf

山梅****ai

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种车载大车全盲区预警系统.pdf
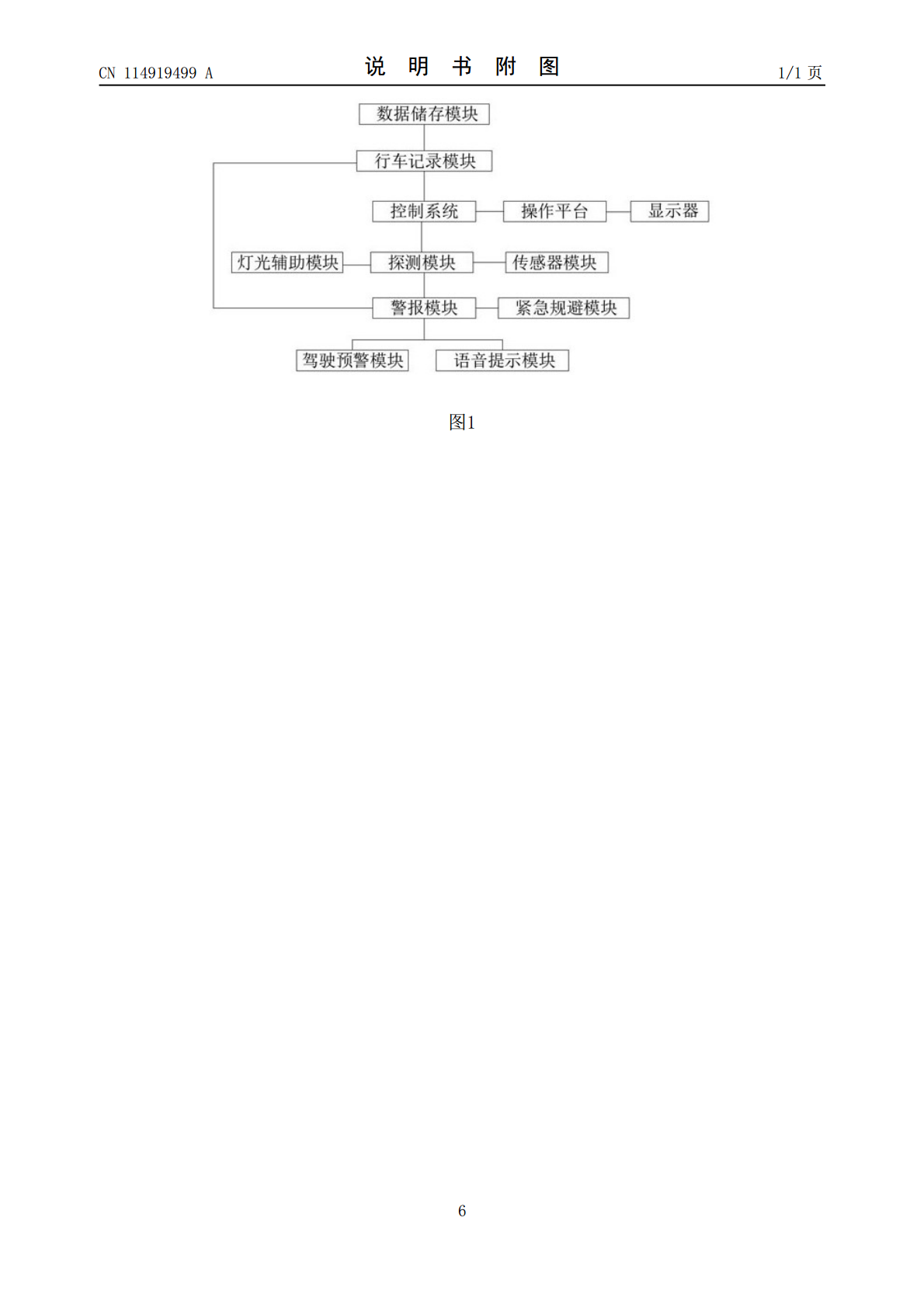
本发明公开了一种车载大车全盲区预警系统,包括控制系统、警报模块、显示屏及行车记录模块,其特征在于,控制系统与行车记录模块通过线路信号连接,行车记录模块的一端与数据储存模块线路连接,控制系统是用于车载大车预警装置整体的控制终端,行车记录模块可对行车路线及周边情况进行实时录制,数据储存模块是把行车记录的视频及信息全部备份,利于后期查证及调取,控制系统的一侧与操作平台电性连接,操作平台为个人终端的调控页面,方便司机及时做出设置,显示器与操作平台的一侧信号连接,显示屏可作为行车过程中的显示设备,便于司机实时对车辆
一种基于后视图像认知的车载盲区预警系统及方法.pdf
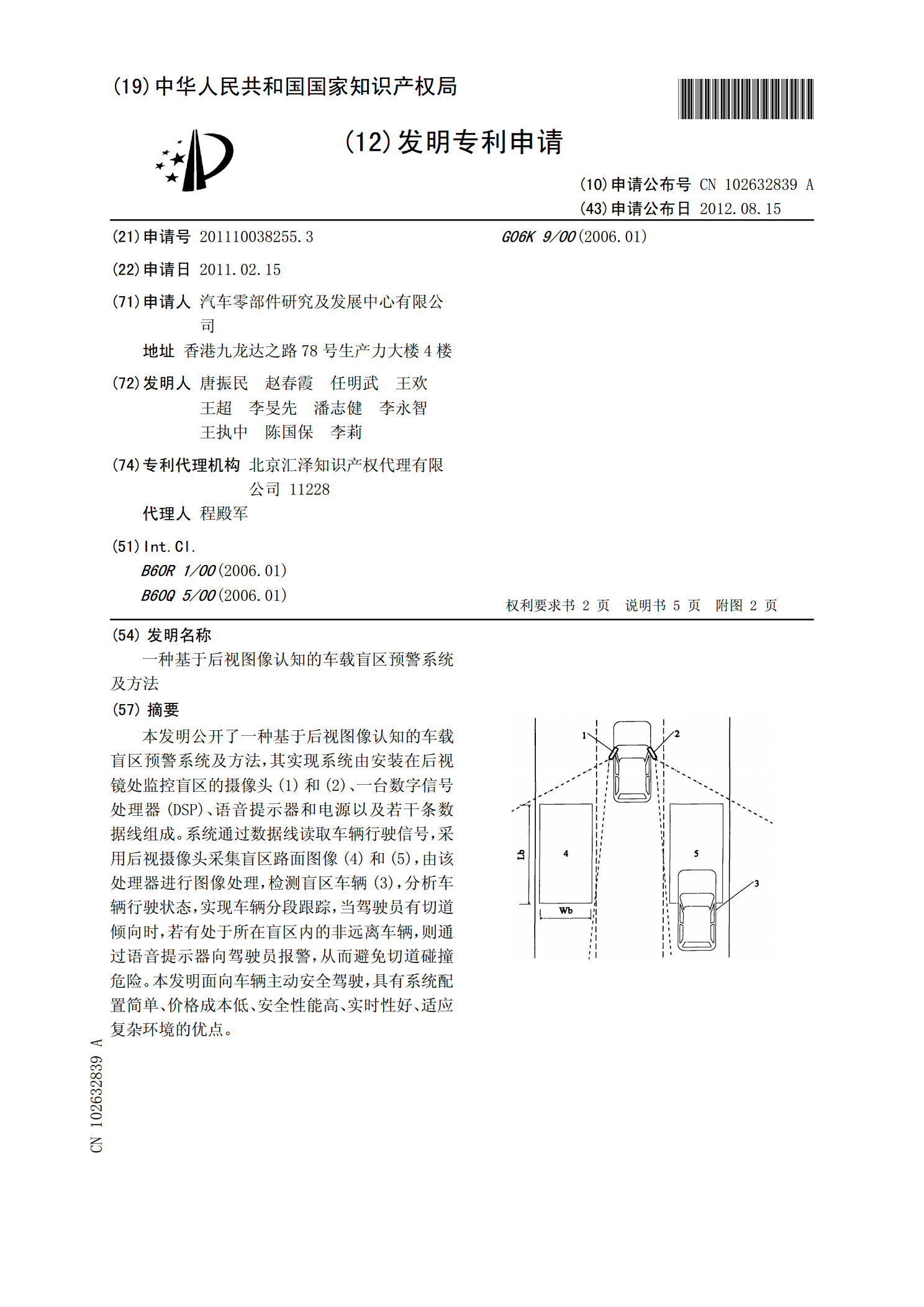
本发明公开了一种基于后视图像认知的车载盲区预警系统及方法,其实现系统由安装在后视镜处监控盲区的摄像头(1)和(2)、一台数字信号处理器(DSP)、语音提示器和电源以及若干条数据线组成。系统通过数据线读取车辆行驶信号,采用后视摄像头采集盲区路面图像(4)和(5),由该处理器进行图像处理,检测盲区车辆(3),分析车辆行驶状态,实现车辆分段跟踪,当驾驶员有切道倾向时,若有处于所在盲区内的非远离车辆,则通过语音提示器向驾驶员报警,从而避免切道碰撞危险。本发明面向车辆主动安全驾驶,具有系统配置简单、价格成本低、安全
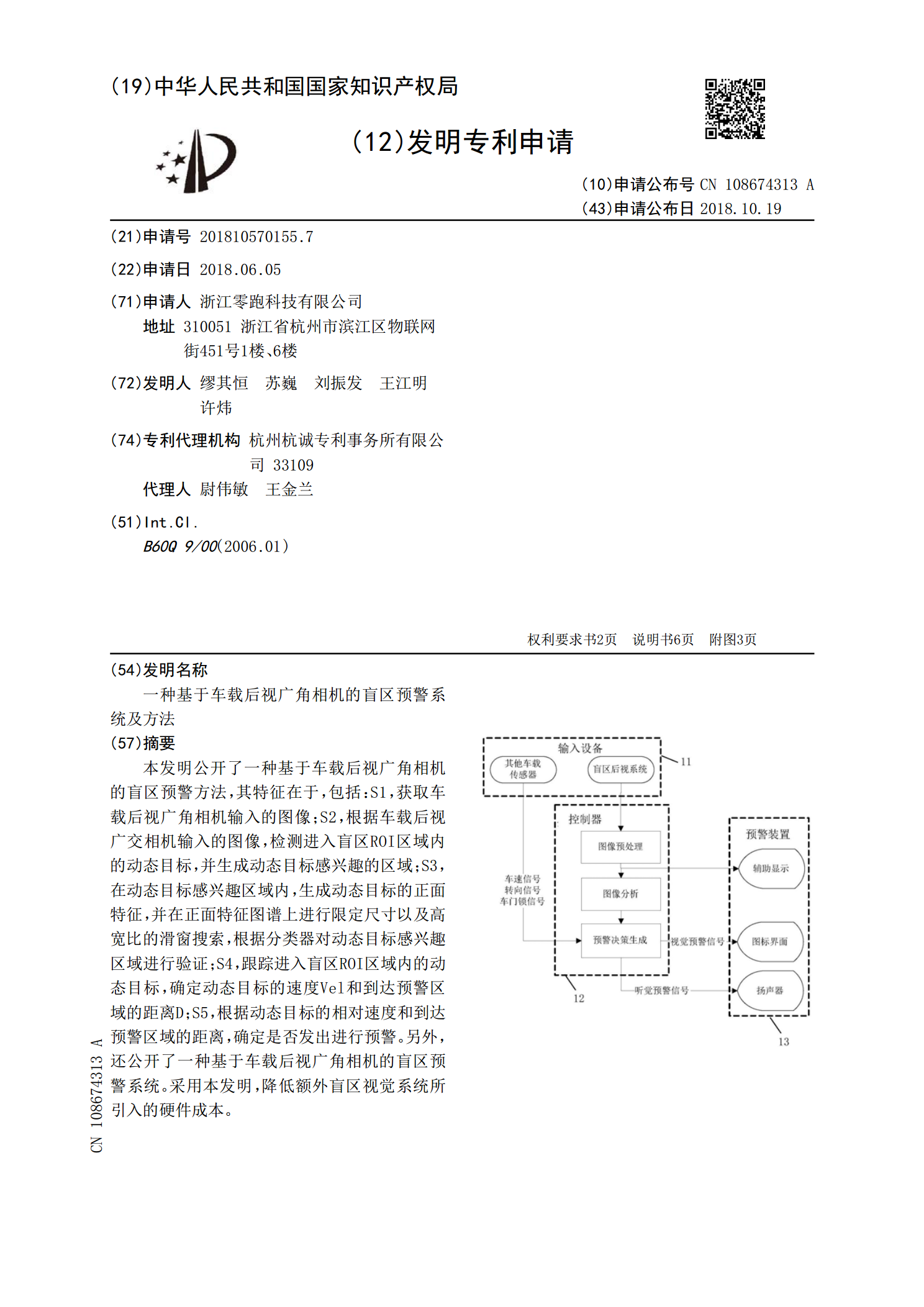
一种基于车载后视广角相机的盲区预警系统及方法.pdf
本发明公开了一种基于车载后视广角相机的盲区预警方法,其特征在于,包括:S1,获取车载后视广角相机输入的图像;S2,根据车载后视广交相机输入的图像,检测进入盲区ROI区域内的动态目标,并生成动态目标感兴趣的区域;S3,在动态目标感兴趣区域内,生成动态目标的正面特征,并在正面特征图谱上进行限定尺寸以及高宽比的滑窗搜索,根据分类器对动态目标感兴趣区域进行验证;S4,跟踪进入盲区ROI区域内的动态目标,确定动态目标的速度Vel和到达预警区域的距离D;S5,根据动态目标的相对速度和到达预警区域的距离,确定是否发出进
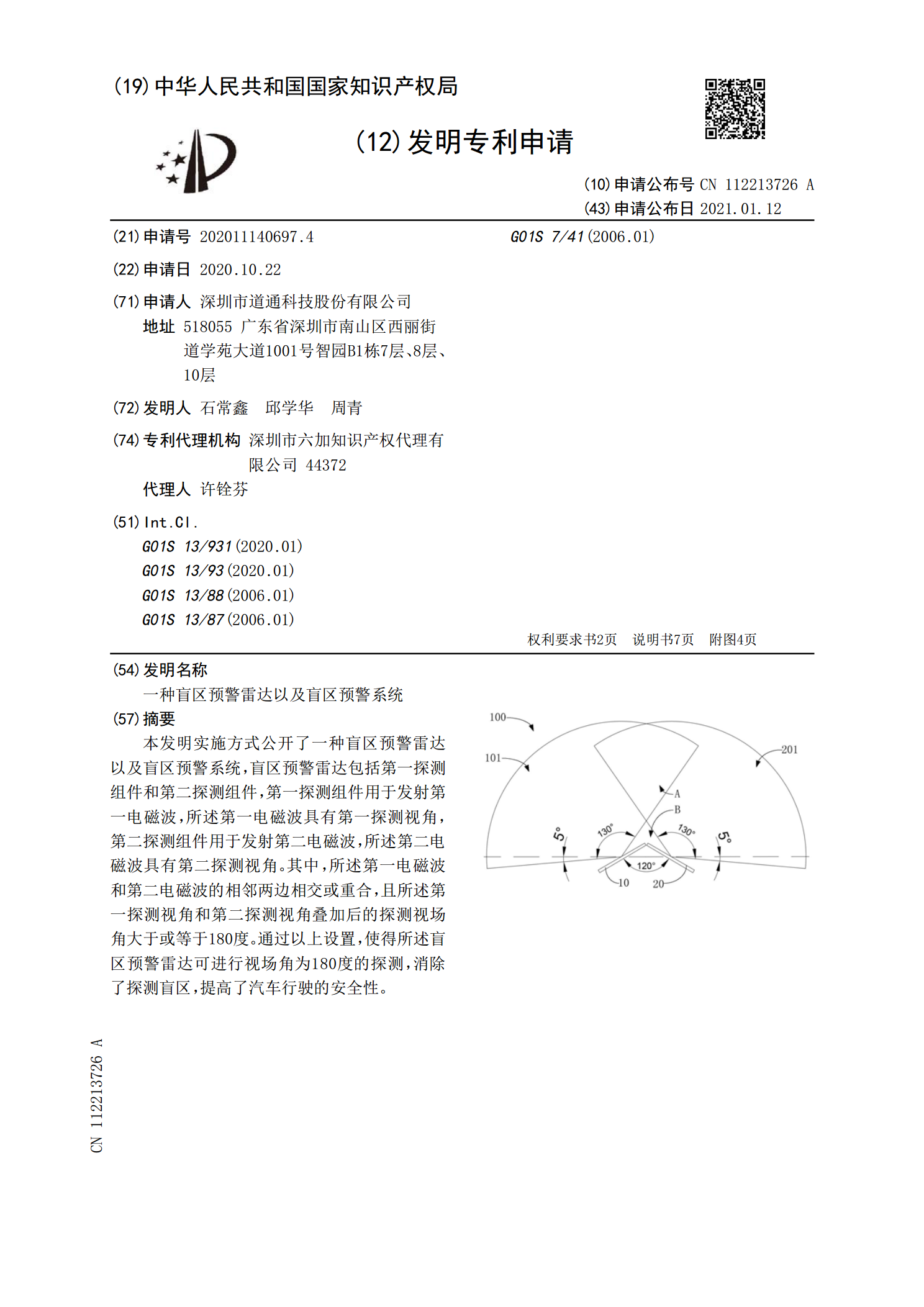
一种盲区预警雷达以及盲区预警系统.pdf
本发明实施方式公开了一种盲区预警雷达以及盲区预警系统,盲区预警雷达包括第一探测组件和第二探测组件,第一探测组件用于发射第一电磁波,所述第一电磁波具有第一探测视角,第二探测组件用于发射第二电磁波,所述第二电磁波具有第二探测视角。其中,所述第一电磁波和第二电磁波的相邻两边相交或重合,且所述第一探测视角和第二探测视角叠加后的探测视场角大于或等于180度。通过以上设置,使得所述盲区预警雷达可进行视场角为180度的探测,消除了探测盲区,提高了汽车行驶的安全性。
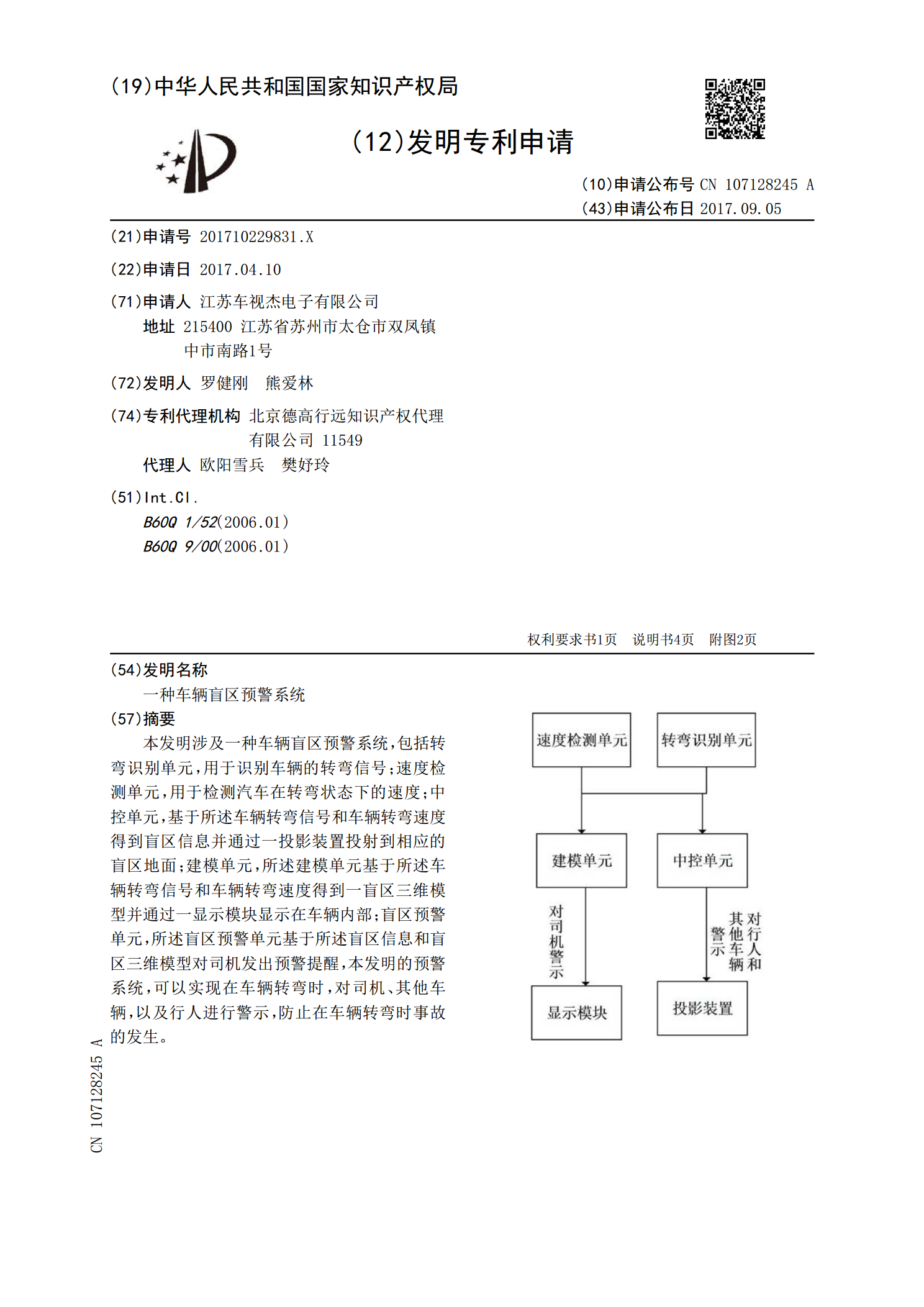
一种车辆盲区预警系统.pdf
本发明涉及一种车辆盲区预警系统,包括转弯识别单元,用于识别车辆的转弯信号;速度检测单元,用于检测汽车在转弯状态下的速度;中控单元,基于所述车辆转弯信号和车辆转弯速度得到盲区信息并通过一投影装置投射到相应的盲区地面;建模单元,所述建模单元基于所述车辆转弯信号和车辆转弯速度得到一盲区三维模型并通过一显示模块显示在车辆内部;盲区预警单元,所述盲区预警单元基于所述盲区信息和盲区三维模型对司机发出预警提醒,本发明的预警系统,可以实现在车辆转弯时,对司机、其他车辆,以及行人进行警示,防止在车辆转弯时事故的发生。