
基于混合微粒群算法的移动机器人路径规划方法及系统.pdf

明轩****la


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于混合微粒群算法的移动机器人路径规划方法及系统.pdf
本发明公开了一种基于混合微粒群算法的移动机器人路径规划方法及系统,通过微粒群‑遗传混合算法选择最优路径,不需要大量的学习样本,收敛速度也更快,规划效果更好;得到最优路径后,机器人按照最优路径移动的过程中,根据机器人当前位置以及机器人当前时刻的运行速度、航向角和障碍物信息实时获取轨迹预测,并对此时的预测轨迹进行评价选取最优轨迹,对移动前的准备条件要求少,移动时的盲点相对较少;通过微粒群‑遗传混合算法选择最优路径并通过实时进行轨迹预测选取最优轨迹,既完成了对所有位置的最优路径的选择,并实时控制机器人从当前位置

基于微粒群算法的移动机器人路径规划研究的中期报告.docx
基于微粒群算法的移动机器人路径规划研究的中期报告中期报告:一、研究背景移动机器人路径规划是移动机器人研究领域的重要内容,也是移动机器人实现自主运动的基础。微粒群算法(ParticleSwarmOptimization,PSO)是一种基于群体智能的随机优化算法,具有全局搜索能力、收敛快等优点,已经在多个领域得到应用。本研究基于微粒群算法来解决移动机器人路径规划问题。二、研究目的研究移动机器人路径规划中的关键问题:避障、最短路径和能源消耗等问题,以及微粒群算法在此问题中的应用,提高移动机器人路径规划的效率和精

基于微粒群算法的移动机器人路径规划研究的综述报告.docx
基于微粒群算法的移动机器人路径规划研究的综述报告近年来,随着移动机器人的普及和应用,路径规划作为其中重要的一环也备受关注。微粒群算法(ParticleSwarmOptimization,PSO)是一种典型的群体智能优化方法,具有全局搜索能力、易于实现等优点,因此在移动机器人路径规划中得到广泛应用。本文将基于相关文献,就基于微粒群算法的移动机器人路径规划研究进行综述。1.微粒群算法的基本原理微粒群算法将候选解向更好的解移动,从而寻找最优解。首先,将优化过程看作一个多维空间,候选解在空间中不断寻找最优解。每个
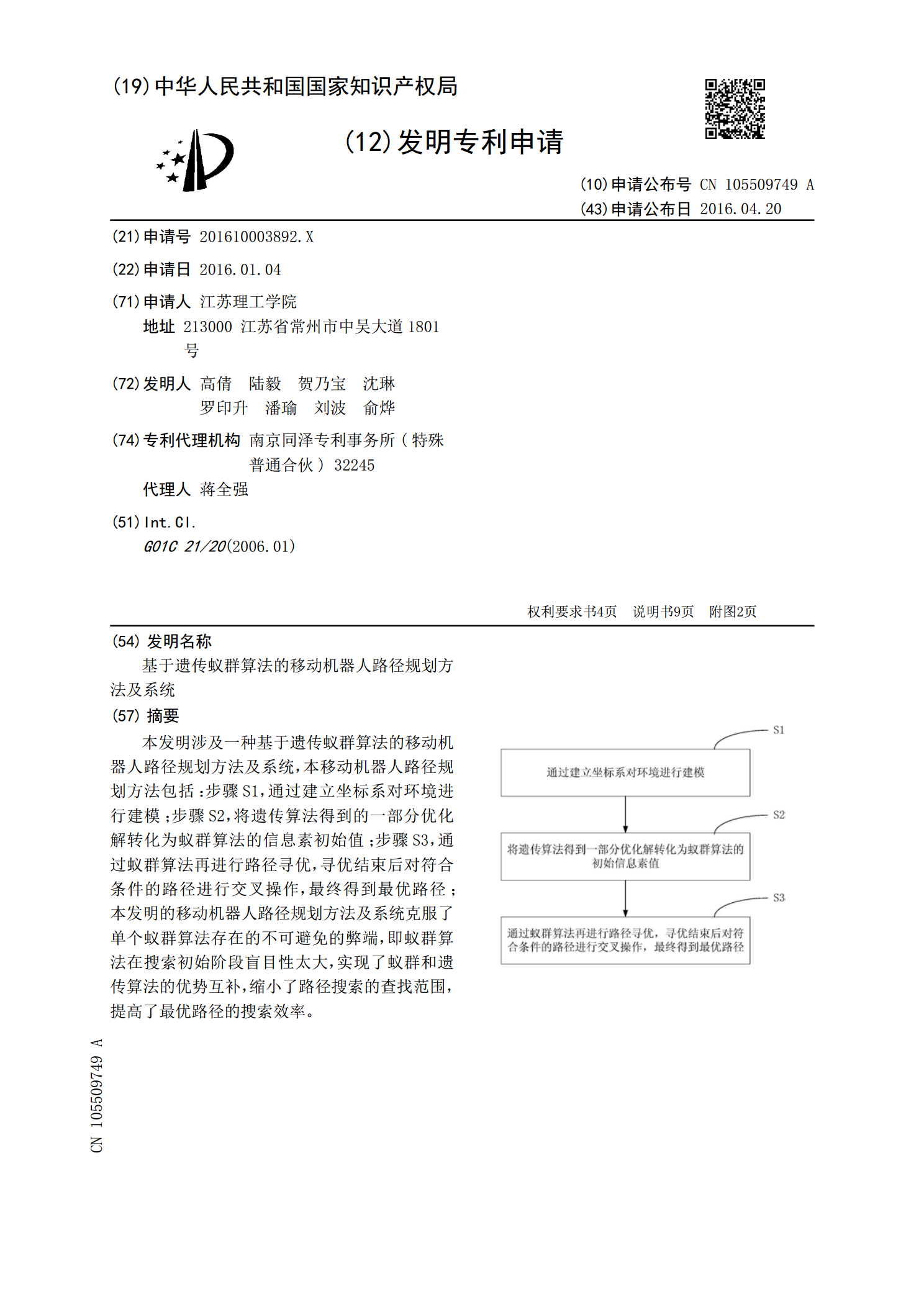
基于遗传蚁群算法的移动机器人路径规划方法及系统.pdf
本发明涉及一种基于遗传蚁群算法的移动机器人路径规划方法及系统,本移动机器人路径规划方法包括:步骤S1,通过建立坐标系对环境进行建模;步骤S2,将遗传算法得到的一部分优化解转化为蚁群算法的信息素初始值;步骤S3,通过蚁群算法再进行路径寻优,寻优结束后对符合条件的路径进行交叉操作,最终得到最优路径;本发明的移动机器人路径规划方法及系统克服了单个蚁群算法存在的不可避免的弊端,即蚁群算法在搜索初始阶段盲目性太大,实现了蚁群和遗传算法的优势互补,缩小了路径搜索的查找范围,提高了最优路径的搜索效率。
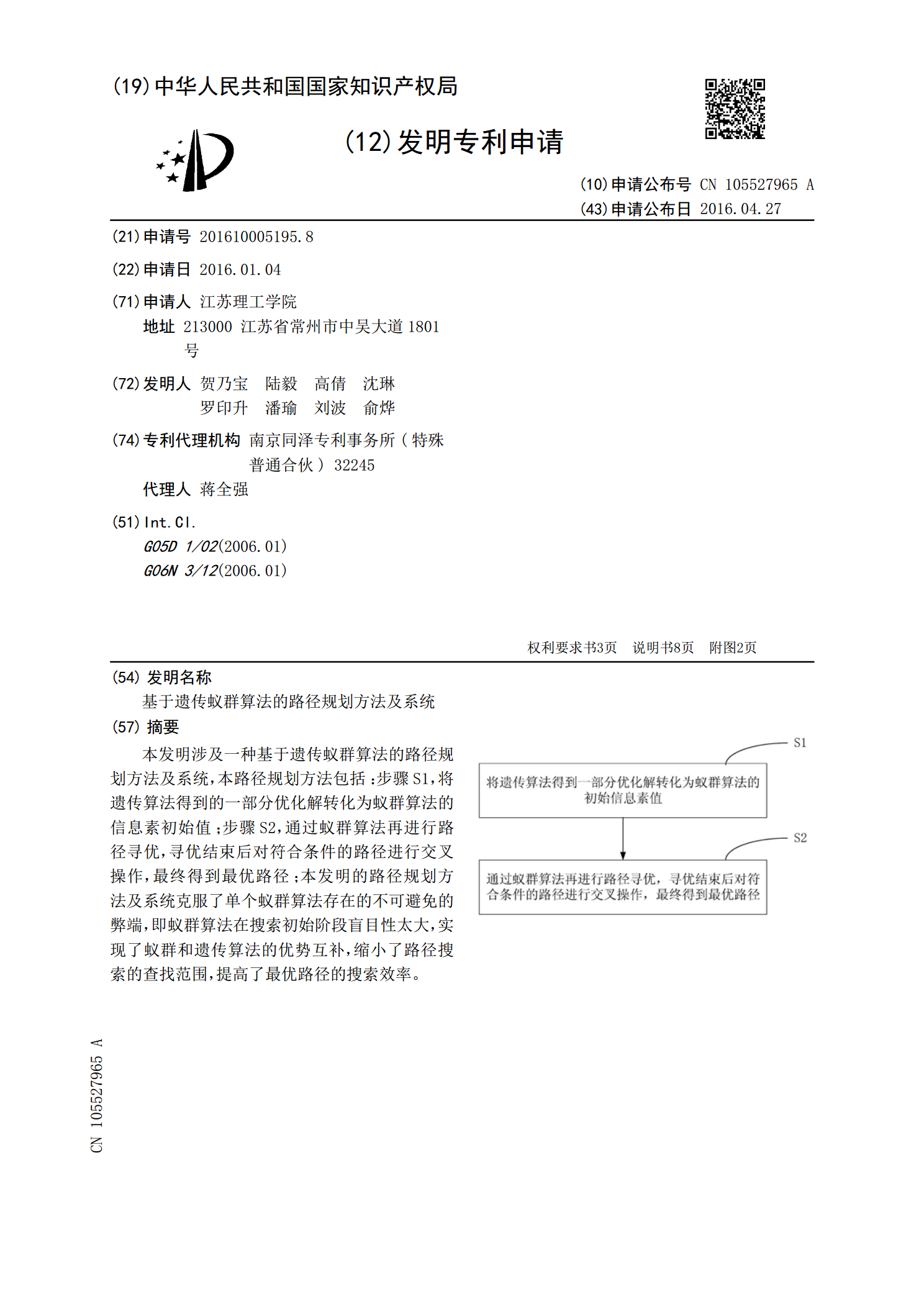
基于遗传蚁群算法的路径规划方法及系统.pdf
本发明涉及一种基于遗传蚁群算法的路径规划方法及系统,本路径规划方法包括:步骤S1,将遗传算法得到的一部分优化解转化为蚁群算法的信息素初始值;步骤S2,通过蚁群算法再进行路径寻优,寻优结束后对符合条件的路径进行交叉操作,最终得到最优路径;本发明的路径规划方法及系统克服了单个蚁群算法存在的不可避免的弊端,即蚁群算法在搜索初始阶段盲目性太大,实现了蚁群和遗传算法的优势互补,缩小了路径搜索的查找范围,提高了最优路径的搜索效率。