
车载环视系统的视角切换方法、系统、电子设备和介质.pdf

思洁****爱吗


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车载环视系统的视角切换方法、系统、电子设备和介质.pdf
本发明涉及车载环视系统的视角切换方法、系统、电子设备和介质,该方法通过构建当前车辆的初始化3D全景图像,确定当前车辆的待行驶区域,及,所述待行驶区域中的障碍物,所述障碍物包括对当前车辆行车威胁最大的障碍物,根据所述障碍物的位置信息,确定3D环视的最优视角,根据所述最优视角,更新初始化3D全景图像中的画面信息,以使更新后的3D全景图像包含对当前车辆行车威胁最大的障碍物和区域,本发明相比现有技术,能够提前定位出车辆的待行驶区域及待行驶区域的障碍物,使得车辆进入待行驶区域之前,就能完全显示出车辆周围的所有盲区及
显示切换控制方法及系统、电子设备和存储介质.pdf
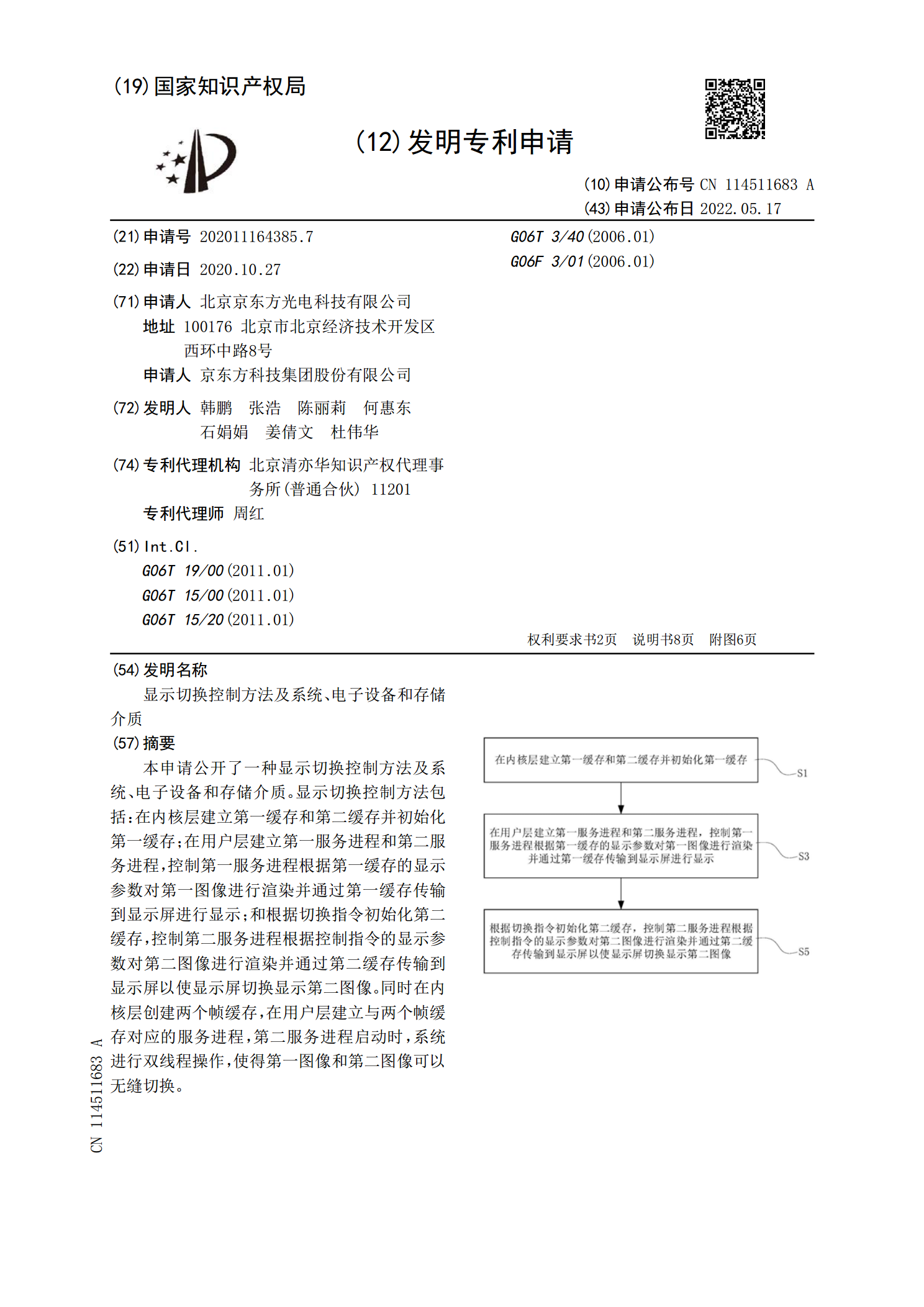
本申请公开了一种显示切换控制方法及系统、电子设备和存储介质。显示切换控制方法包括:在内核层建立第一缓存和第二缓存并初始化第一缓存;在用户层建立第一服务进程和第二服务进程,控制第一服务进程根据第一缓存的显示参数对第一图像进行渲染并通过第一缓存传输到显示屏进行显示;和根据切换指令初始化第二缓存,控制第二服务进程根据控制指令的显示参数对第二图像进行渲染并通过第二缓存传输到显示屏以使显示屏切换显示第二图像。同时在内核层创建两个帧缓存,在用户层建立与两个帧缓存对应的服务进程,第二服务进程启动时,系统进行双线程操作,
应用环境切换方法及系统、存储介质和电子设备.pdf
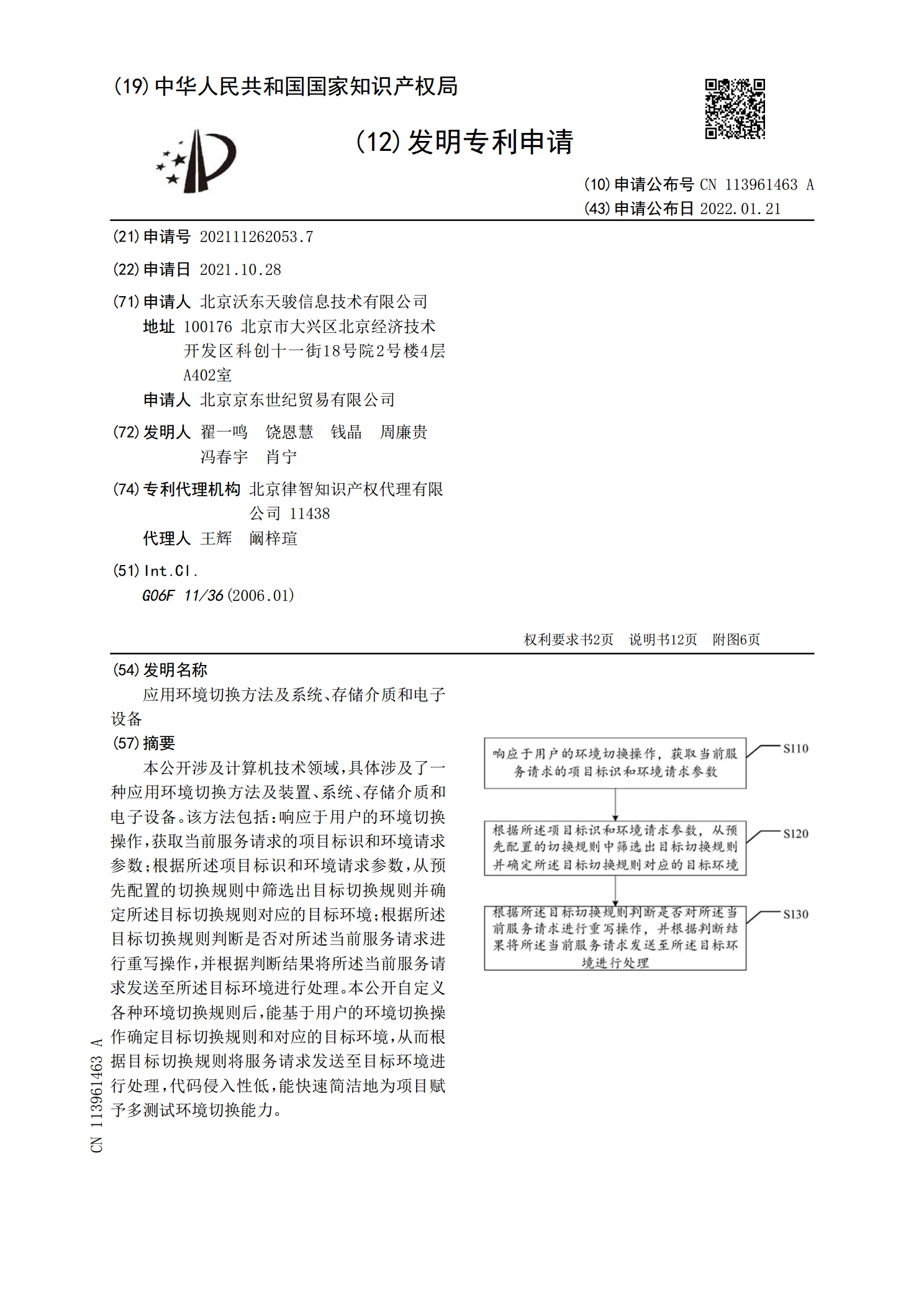
本公开涉及计算机技术领域,具体涉及了一种应用环境切换方法及装置、系统、存储介质和电子设备。该方法包括:响应于用户的环境切换操作,获取当前服务请求的项目标识和环境请求参数;根据所述项目标识和环境请求参数,从预先配置的切换规则中筛选出目标切换规则并确定所述目标切换规则对应的目标环境;根据所述目标切换规则判断是否对所述当前服务请求进行重写操作,并根据判断结果将所述当前服务请求发送至所述目标环境进行处理。本公开自定义各种环境切换规则后,能基于用户的环境切换操作确定目标切换规则和对应的目标环境,从而根据目标切换规则
一种车载环视系统的环视图拼接方法.pdf
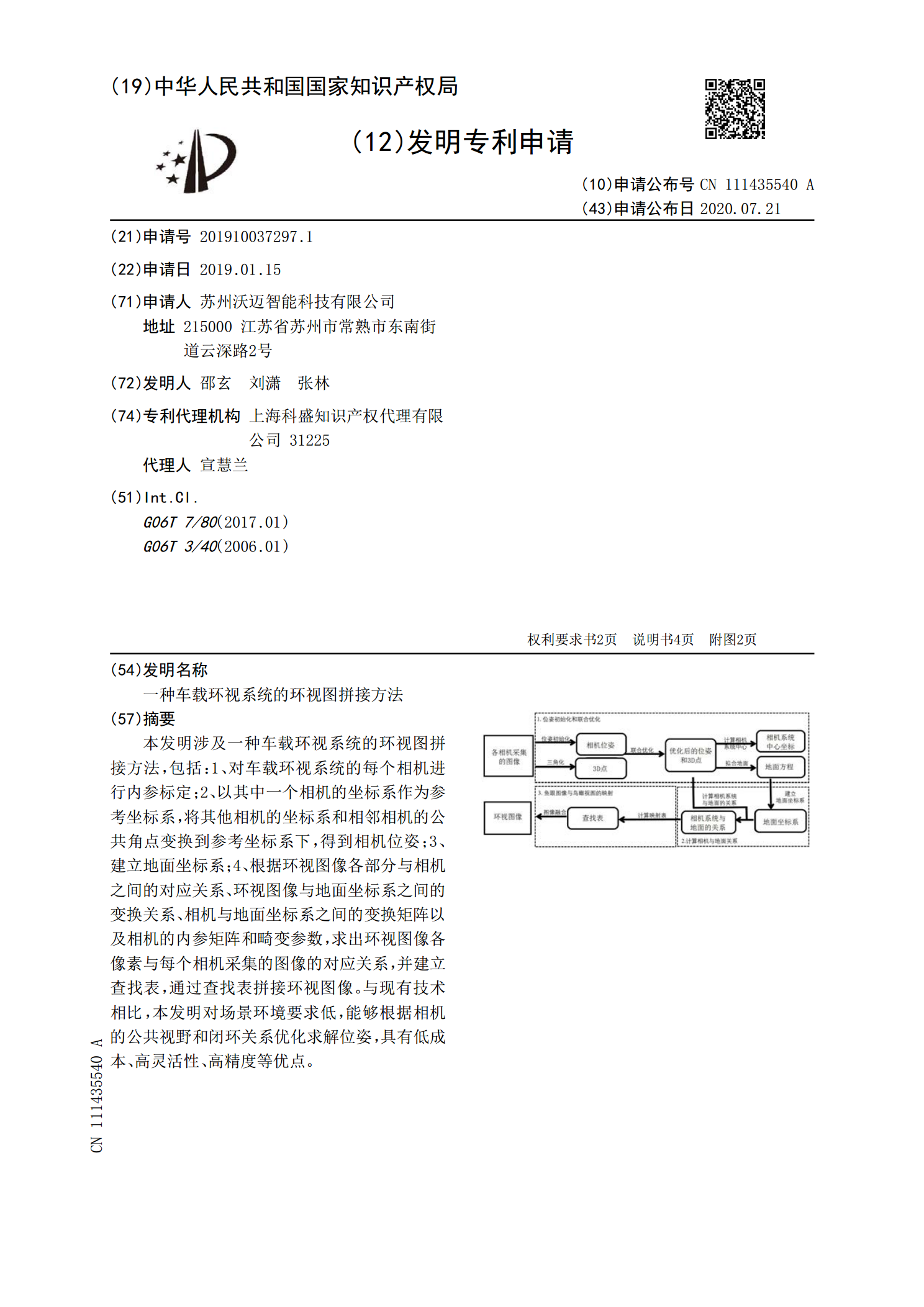
本发明涉及一种车载环视系统的环视图拼接方法,包括:1、对车载环视系统的每个相机进行内参标定;2、以其中一个相机的坐标系作为参考坐标系,将其他相机的坐标系和相邻相机的公共角点变换到参考坐标系下,得到相机位姿;3、建立地面坐标系;4、根据环视图像各部分与相机之间的对应关系、环视图像与地面坐标系之间的变换关系、相机与地面坐标系之间的变换矩阵以及相机的内参矩阵和畸变参数,求出环视图像各像素与每个相机采集的图像的对应关系,并建立查找表,通过查找表拼接环视图像。与现有技术相比,本发明对场景环境要求低,能够根据相机的公

一种车载监控方法、车载监控系统、电子设备和存储介质.pdf
本申请提供了一种车载监控方法、车载监控系统、电子设备和存储介质,所述车载监控方法包括:环境感知模块检测目标车辆与周围的障碍物之间的障碍物距离,并将所述障碍物距离发送给中心控制模块;中心控制模块判断所述障碍物距离是否小于或等于预设的距离阈值,若是,则生成视频采集指令,并将所述视频采集指令发送给视频采集模块;视频采集模块根据所述视频采集指令采集所述目标车辆四周的实景视频;FPGA视频存储模块获取所述视频采集模块采集的所述实景视频并进行存储。根据所述车载监控方法和车载监控系统,可以实现对车辆的全方位、实时有效地