
图像生成方法、装置、电子设备及存储介质.pdf

桂香****盟主

1/10
2/10

3/10

4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

图像生成方法、图像生成装置、存储介质与电子设备.pdf
本公开提供一种图像生成方法、图像生成装置、计算机可读存储介质与电子设备,涉及图像处理技术领域。该图像生成方法包括:响应于用户选择虚拟曝光模式,确定单张曝光时间;根据预设曝光时间和所述单张曝光时间确定目标数量,所述目标数量为生成长曝光图像所需的原始图像的数量,所述目标数量至少为两张;通过所述单张曝光时间获取所述目标数量的原始图像;合成所述原始图像,生成所述长曝光图像。本公开通过虚拟曝光模式生成长曝光图像,即能够避免曝光时间过长导致图像过曝的情况,还可以保留有效的物体运动轨迹。
图像生成方法、装置、电子设备及存储介质.pdf
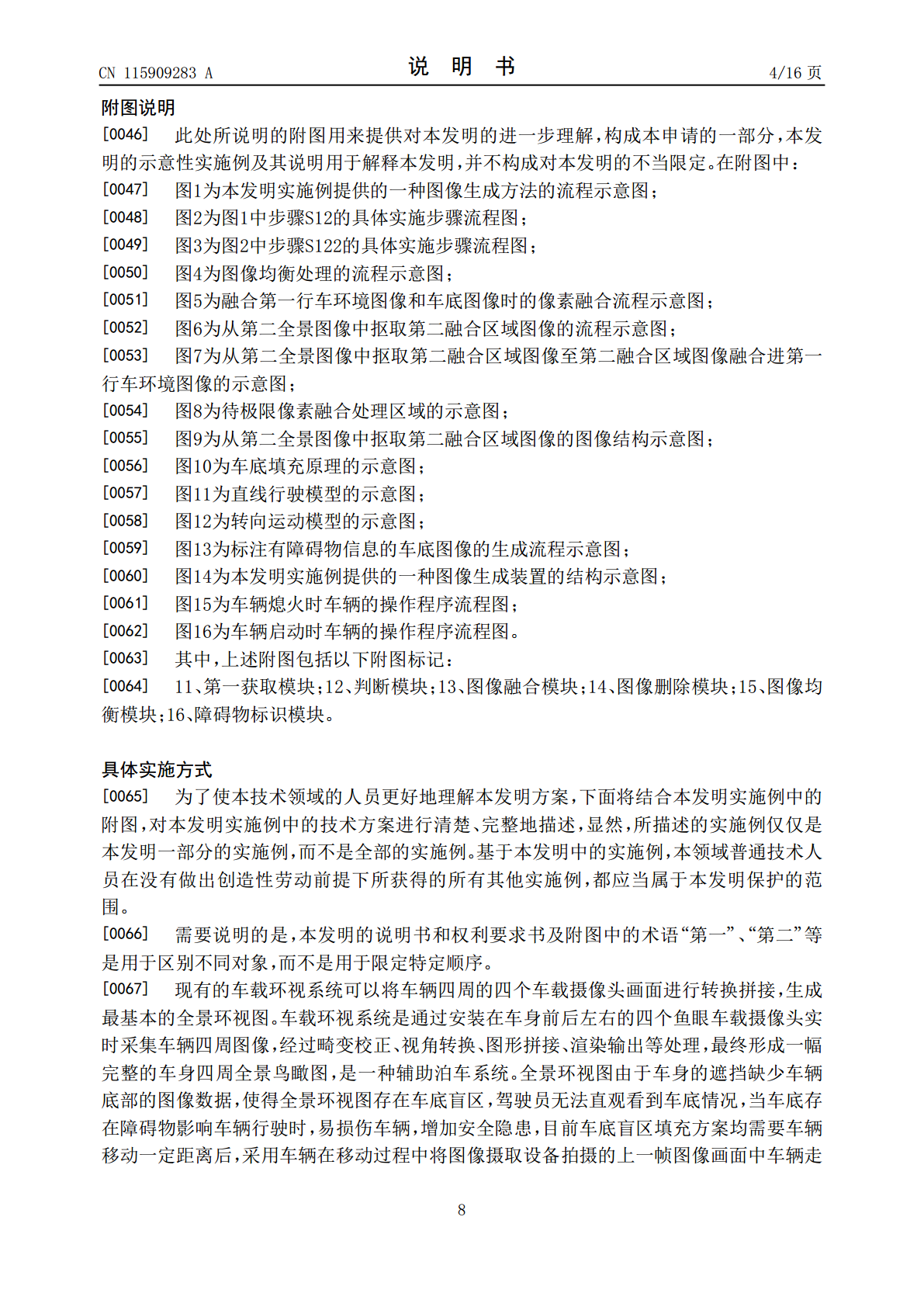
本发明实施例公开了一种图像生成方法、装置、电子设备及存储介质,涉及图像识别技术领域。该方法包括:响应于车辆熄火后的重新启动信号,获取车辆在重新启动过程中的第一行车环境图像;判断车辆的位置是否发生移动,以及在车辆的位置未发生移动的情况下,获取车辆熄火前保存的车底图像,车底图像为用于对车辆底部的道路信息进行展示的图像;融合第一行车环境图像和车底图像,得到车辆在重新启动过程中的第一全景图像。本发明解决了现有的无盲区的全景图在车辆熄火重启后,仍存在盲区的技术问题。
图像生成方法、装置、电子设备及存储介质.pdf
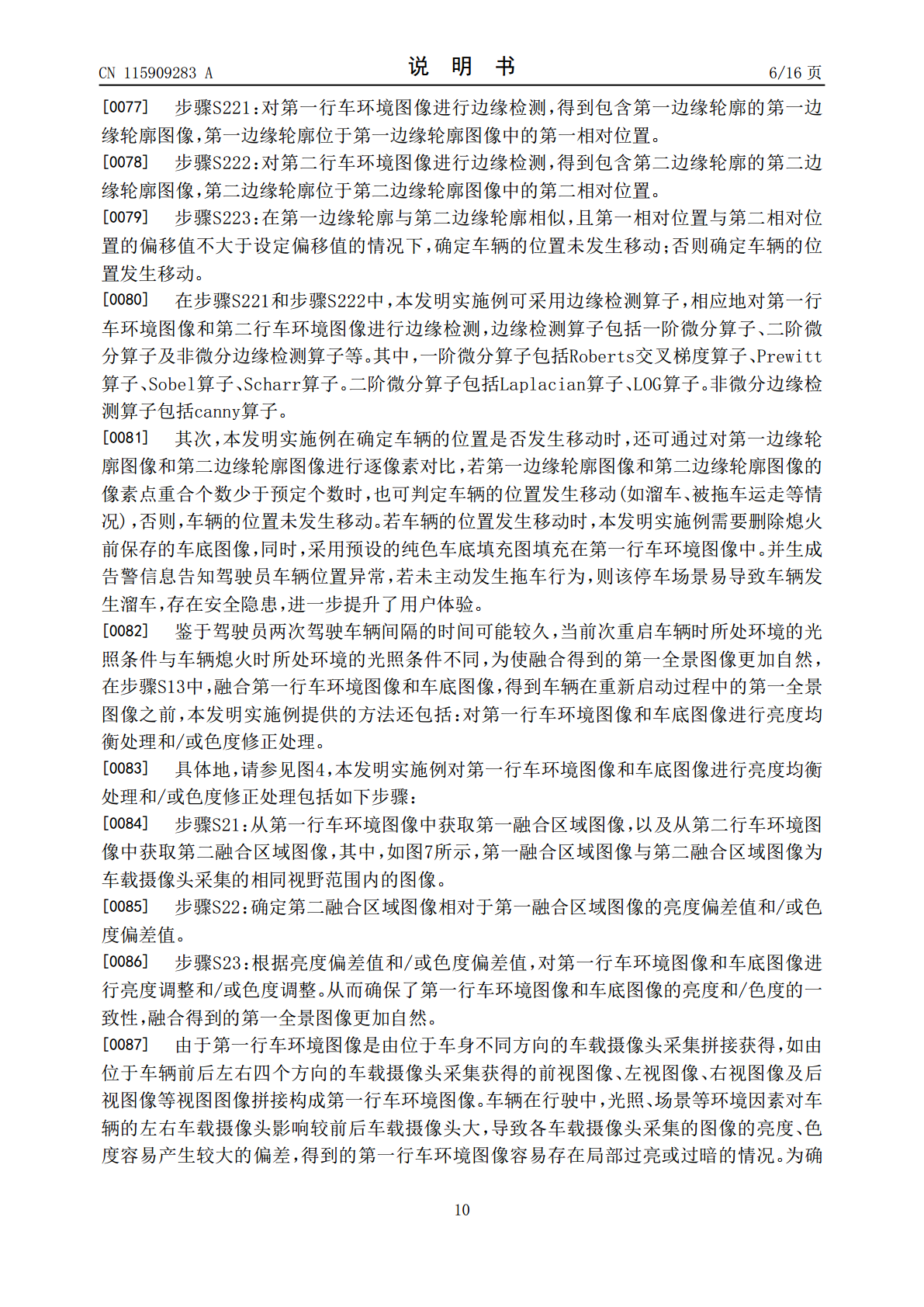
本公开关于一种图像生成方法、装置、电子设备及存储介质,该方法包括获取预设对象编码和目标风格的目标风格编码;基于风格融合网络中预设数量个网络层对应的网络融合参数,对目标风格编码和预设对象编码进行风格融合处理,得到目标风格融合编码;网络融合参数为基于预设数量个网络层对应的融合数据和目标融合权重确定的,目标融合权重为基于目标风格编码和预设对象编码进行融合权重学习得到的;将所述目标风格融合编码输入目标图像生成网络进行图像生成处理,得到所述目标风格对应的预设对象风格图像。利用本公开实施例可以快速生成高质量的对象风格

图像生成方法、装置、电子设备及存储介质.pdf
本公开提供了一种图像生成方法、装置、电子设备及存储介质,涉及人工智能技术领域,具体涉及深度学习、计算机视觉等技术领域,可应用于人脸图像处理和人脸图像识别等场景下。包括:获取参考图像和待处理图像,并从参考图像之中提取出目标融合特征,再根据目标融合特征,确定与参考图像对应的多个深度特征图,并根据目标融合特征,对多个深度特征图进行融合处理得到目标特征图,以及根据目标特征图处理待处理图像,以生成目标图像,由此能够有效地降低图像融合的计算量,有效适用于算力较低的电子设备,在有效地节约计算资源的同时,有效地提升图像生
图像生成方法、装置、电子设备及存储介质.pdf
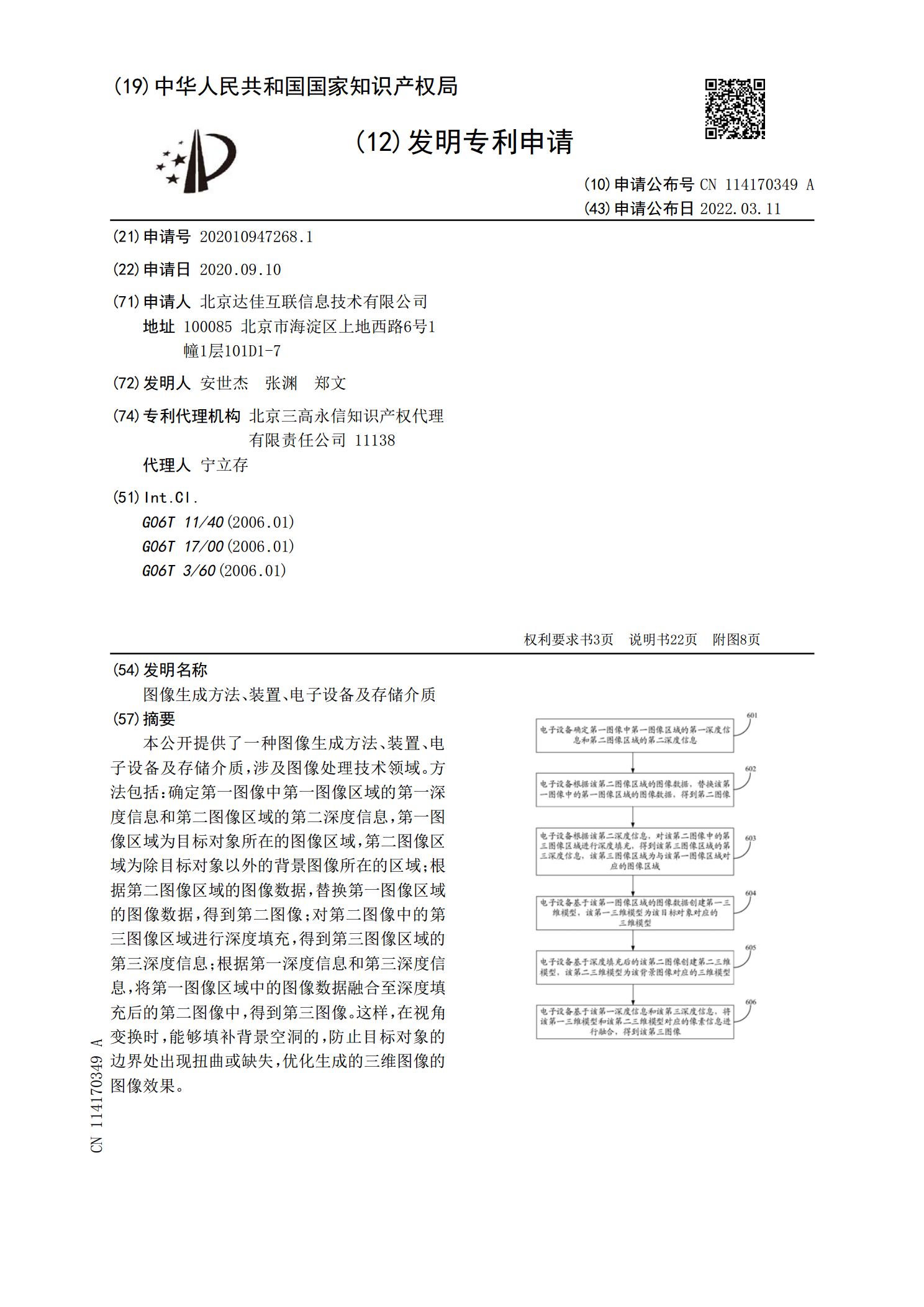
本公开提供了一种图像生成方法、装置、电子设备及存储介质,涉及图像处理技术领域。方法包括:确定第一图像中第一图像区域的第一深度信息和第二图像区域的第二深度信息,第一图像区域为目标对象所在的图像区域,第二图像区域为除目标对象以外的背景图像所在的区域;根据第二图像区域的图像数据,替换第一图像区域的图像数据,得到第二图像;对第二图像中的第三图像区域进行深度填充,得到第三图像区域的第三深度信息;根据第一深度信息和第三深度信息,将第一图像区域中的图像数据融合至深度填充后的第二图像中,得到第三图像。这样,在视角变换时,