
牵引式导盲腿臂机器人.pdf

森林****io

1/10

2/10
3/10

4/10
5/10
6/10
7/10

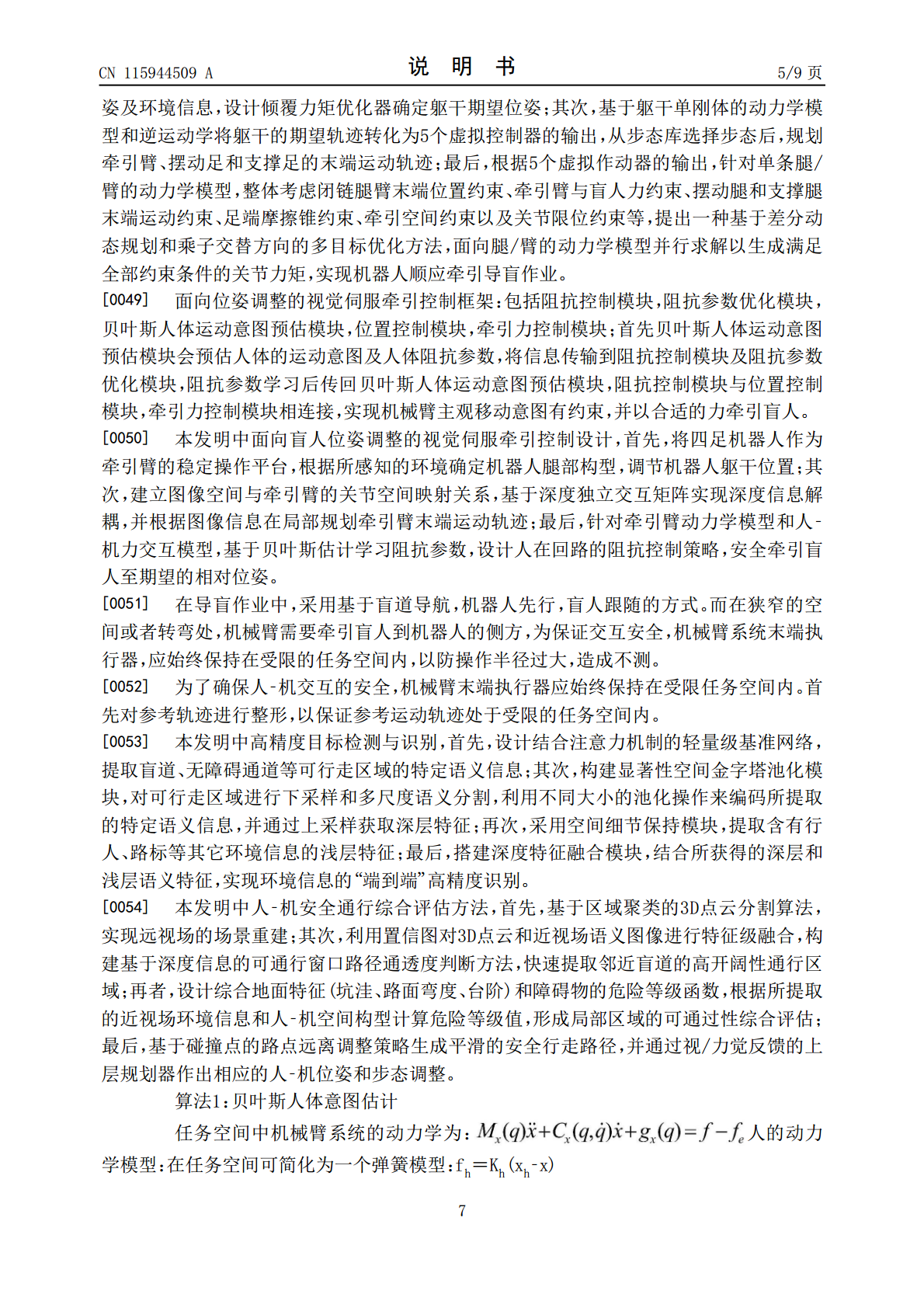
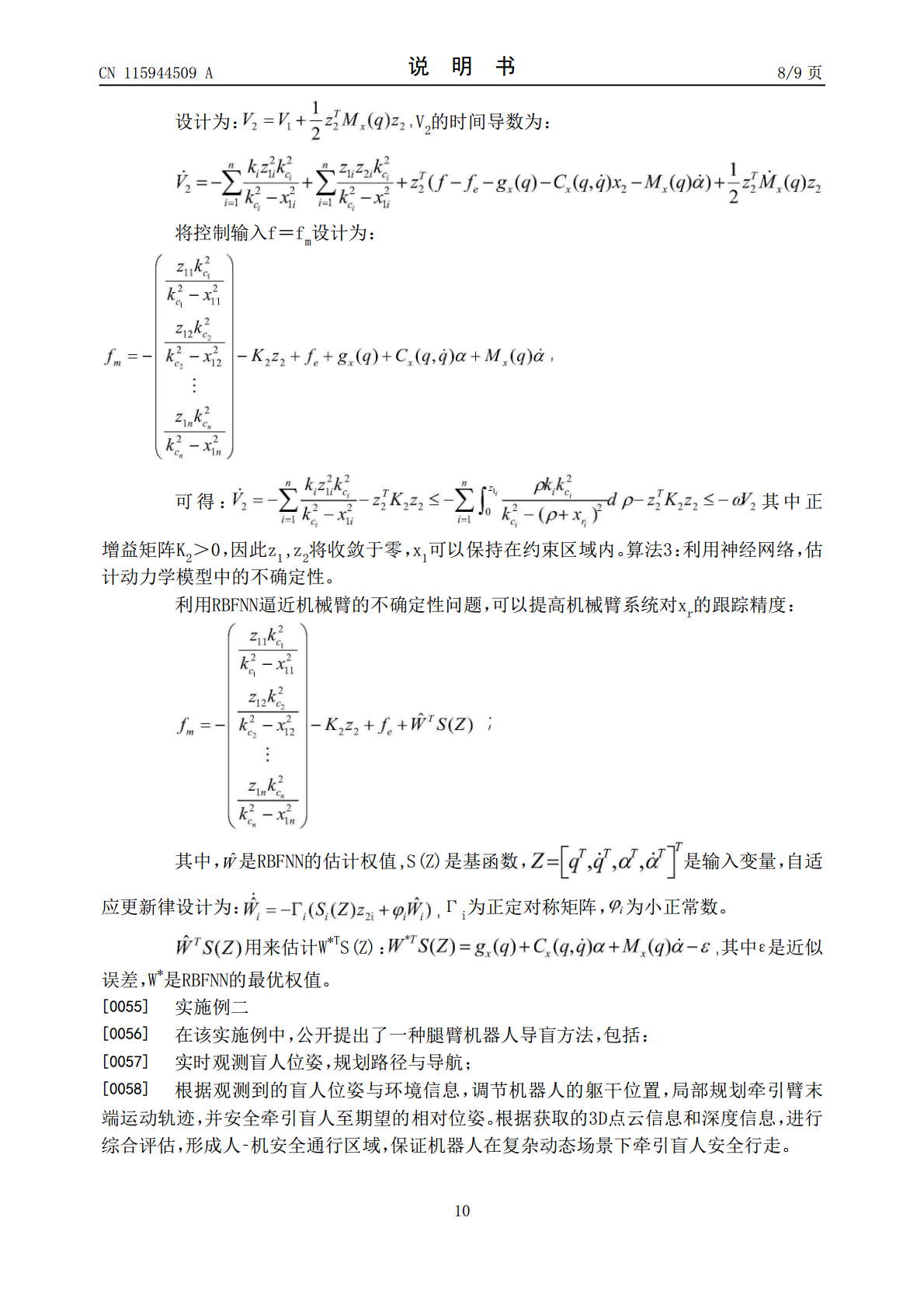
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
牵引式导盲腿臂机器人.pdf
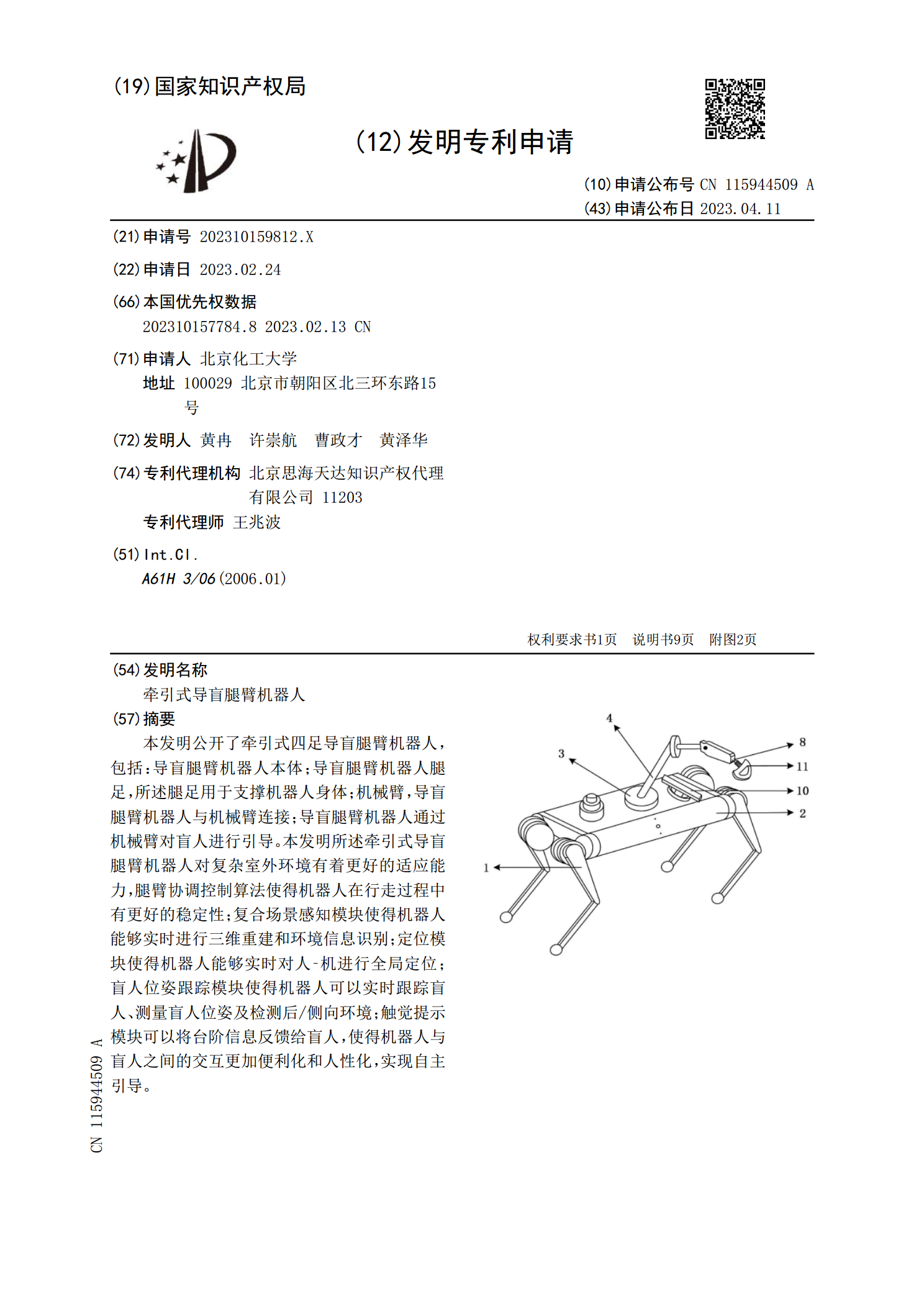
本发明公开了牵引式四足导盲腿臂机器人,包括:导盲腿臂机器人本体;导盲腿臂机器人腿足,所述腿足用于支撑机器人身体;机械臂,导盲腿臂机器人与机械臂连接;导盲腿臂机器人通过机械臂对盲人进行引导。本发明所述牵引式导盲腿臂机器人对复杂室外环境有着更好的适应能力,腿臂协调控制算法使得机器人在行走过程中有更好的稳定性;复合场景感知模块使得机器人能够实时进行三维重建和环境信息识别;定位模块使得机器人能够实时对人‑机进行全局定位;盲人位姿跟踪模块使得机器人可以实时跟踪盲人、测量盲人位姿及检测后/侧向环境;触觉提示模块可以将
六足腿式导盲机器人.pdf
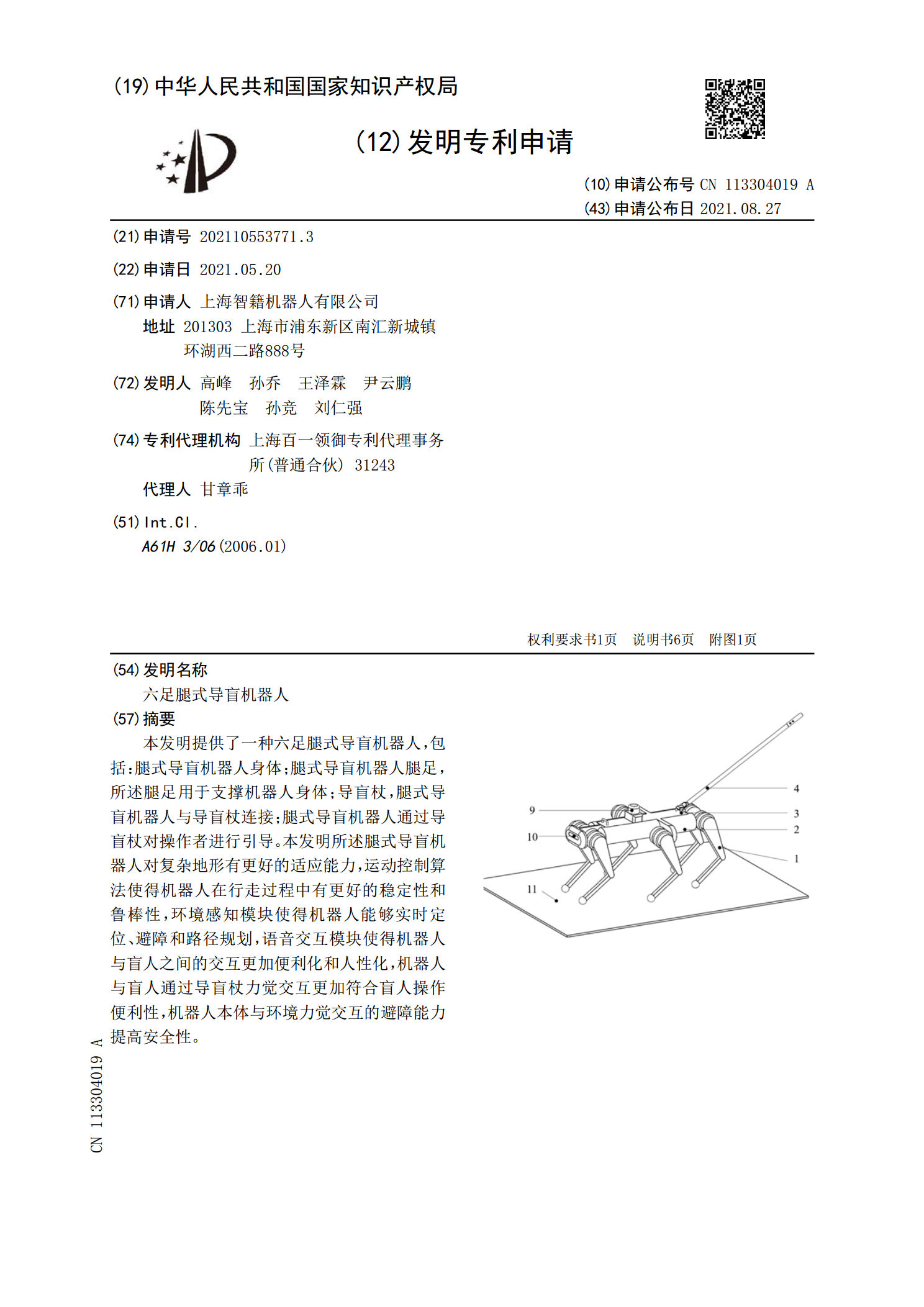
本发明提供了一种六足腿式导盲机器人,包括:腿式导盲机器人身体;腿式导盲机器人腿足,所述腿足用于支撑机器人身体;导盲杖,腿式导盲机器人与导盲杖连接;腿式导盲机器人通过导盲杖对操作者进行引导。本发明所述腿式导盲机器人对复杂地形有更好的适应能力,运动控制算法使得机器人在行走过程中有更好的稳定性和鲁棒性,环境感知模块使得机器人能够实时定位、避障和路径规划,语音交互模块使得机器人与盲人之间的交互更加便利化和人性化,机器人与盲人通过导盲杖力觉交互更加符合盲人操作便利性,机器人本体与环境力觉交互的避障能力提高安全性。
一种用于腿臂融合操作的轮腿式机器人的单腿结构.pdf
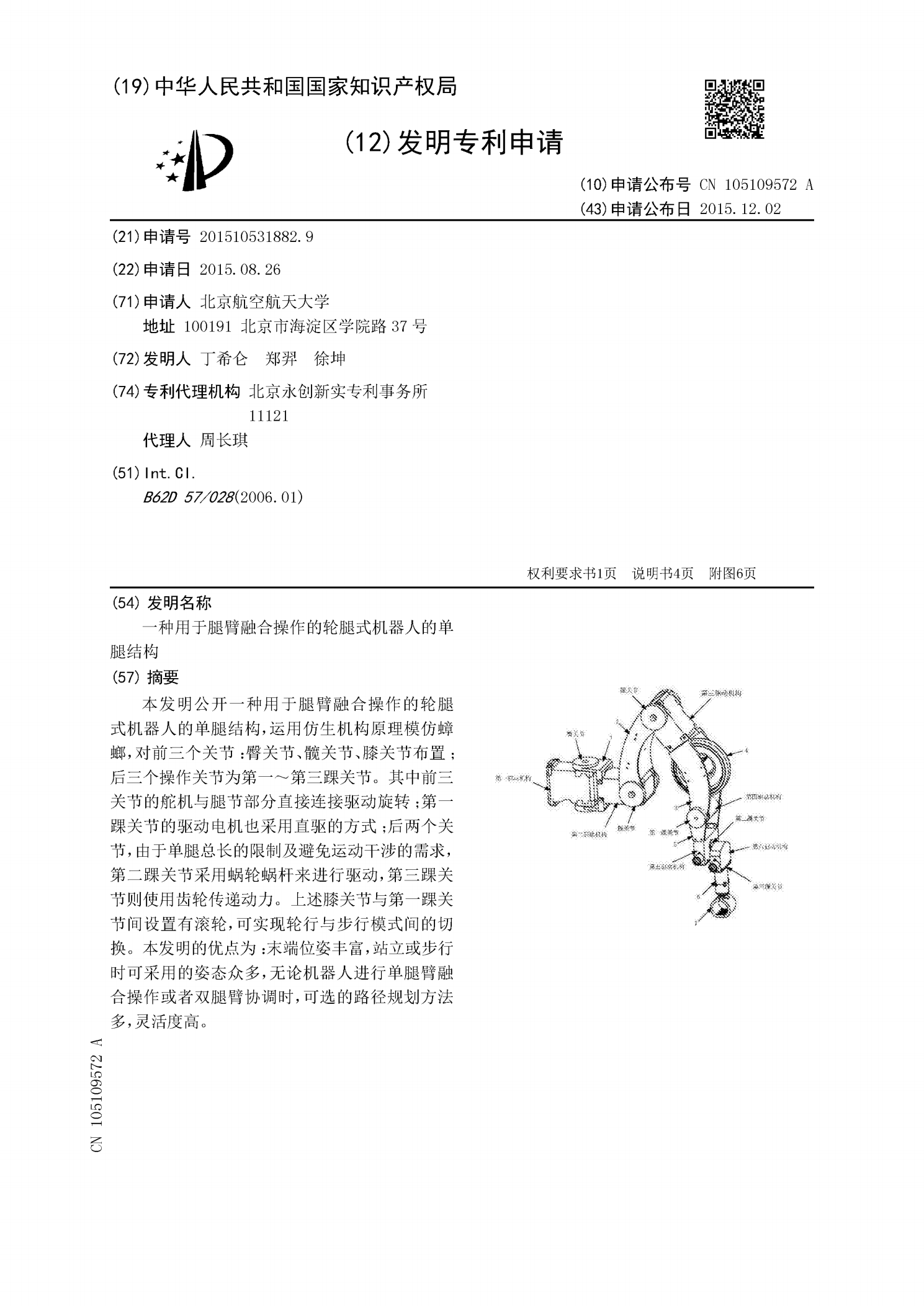
本发明公开一种用于腿臂融合操作的轮腿式机器人的单腿结构,运用仿生机构原理模仿蟑螂,对前三个关节:臀关节、髋关节、膝关节布置;后三个操作关节为第一~第三踝关节。其中前三关节的舵机与腿节部分直接连接驱动旋转;第一踝关节的驱动电机也采用直驱的方式;后两个关节,由于单腿总长的限制及避免运动干涉的需求,第二踝关节采用蜗轮蜗杆来进行驱动,第三踝关节则使用齿轮传递动力。上述膝关节与第一踝关节间设置有滚轮,可实现轮行与步行模式间的切换。本发明的优点为:末端位姿丰富,站立或步行时可采用的姿态众多,无论机器人进行单腿臂融合操
一种轮腿式机器人的驱动牵引特性控制方法.pdf
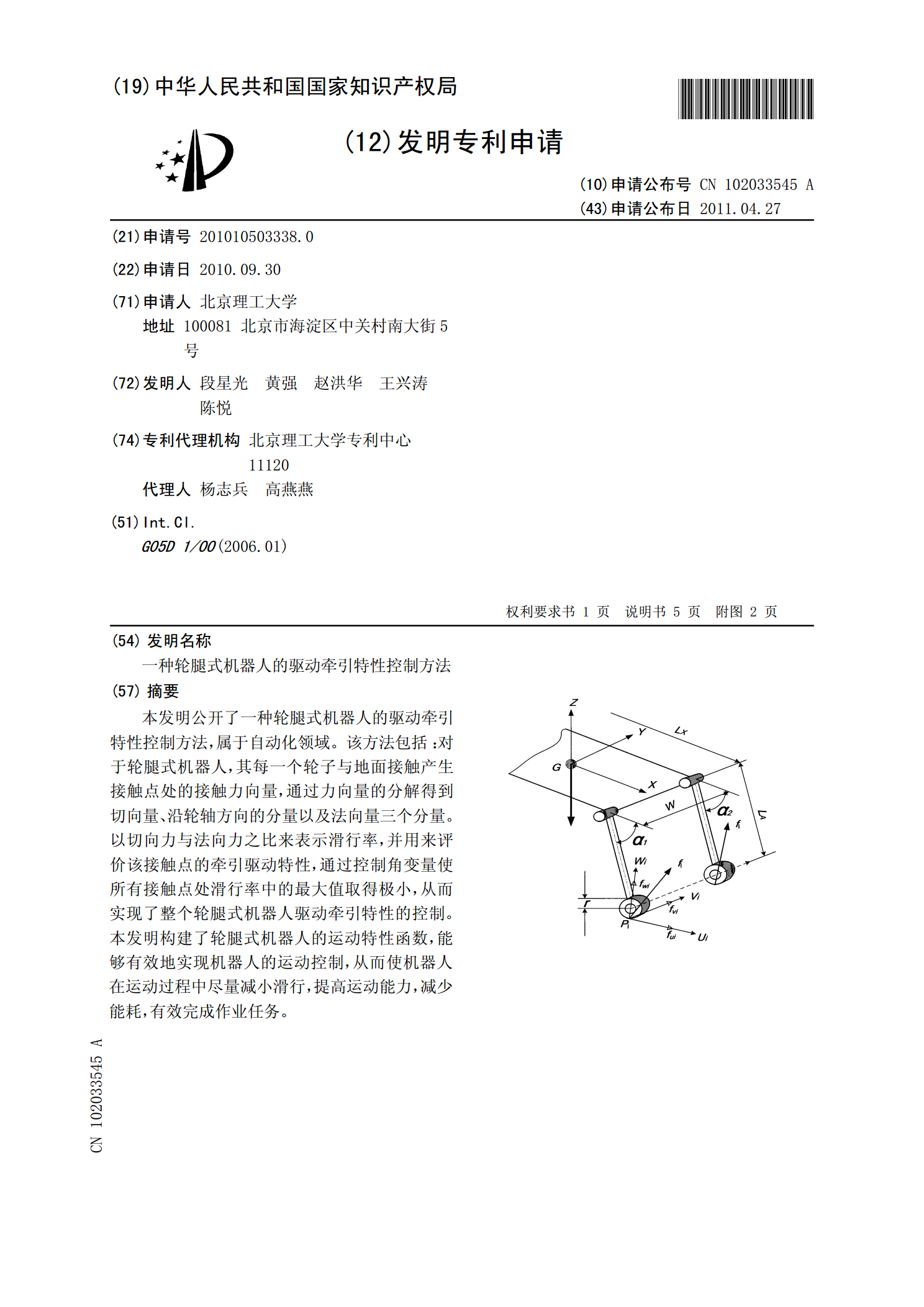
本发明公开了一种轮腿式机器人的驱动牵引特性控制方法,属于自动化领域。该方法包括:对于轮腿式机器人,其每一个轮子与地面接触产生接触点处的接触力向量,通过力向量的分解得到切向量、沿轮轴方向的分量以及法向量三个分量。以切向力与法向力之比来表示滑行率,并用来评价该接触点的牵引驱动特性,通过控制角变量使所有接触点处滑行率中的最大值取得极小,从而实现了整个轮腿式机器人驱动牵引特性的控制。本发明构建了轮腿式机器人的运动特性函数,能够有效地实现机器人的运动控制,从而使机器人在运动过程中尽量减小滑行,提高运动能力,减少能耗

一种前置牵引式导盲导向前胸包.pdf
本发明公开了一种前置牵引式导盲导向前胸包,主要包括包体、移动终端、以及导盲组件。使用时,利用手机将导航信息通过语音形式播报给视障人群,并将移动方向和距离转化为舵机的转动方向和时间。舵机带动转动盘转动,转动盘缠绕着转动带做同向移动,滑动组件在转动带拉力控制下沿着滑槽左右滑动停留,视障人群通过感知滚珠的滑动偏移位置判断此刻需转动的方向,转动到滚珠回到中心为止,当滚珠处于滑槽中间位置时表示可以直行,再次需要转方向时,滚珠将再次震动并偏移,如此循环通过触觉感知直接引导视障人群出行。另外,在衣服很厚不方便使用皮肤感