
应用于线扫描X射线安检机中图像去皮带伪影的方法.pdf

醉香****mm

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
应用于线扫描X射线安检机中图像去皮带伪影的方法.pdf
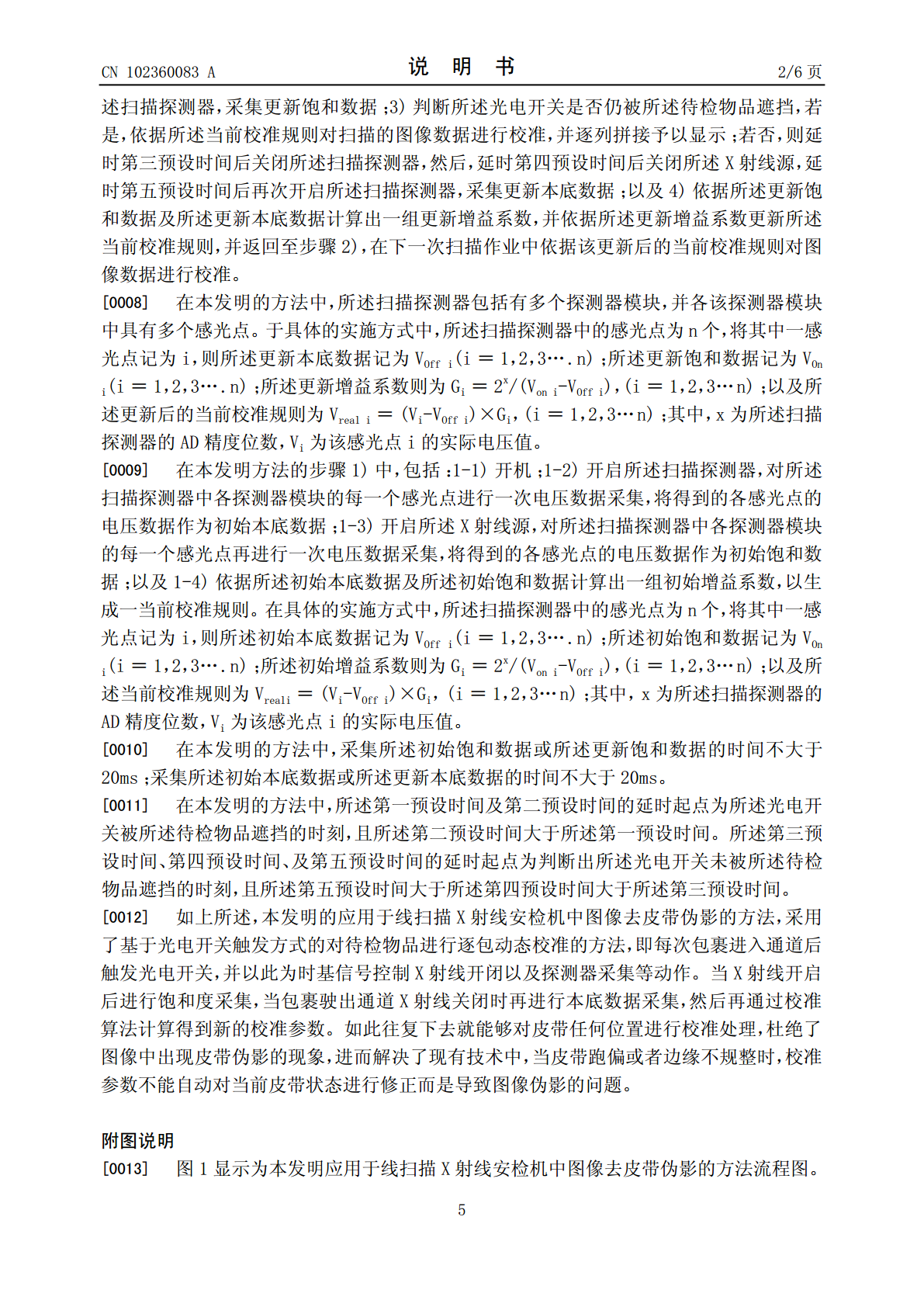
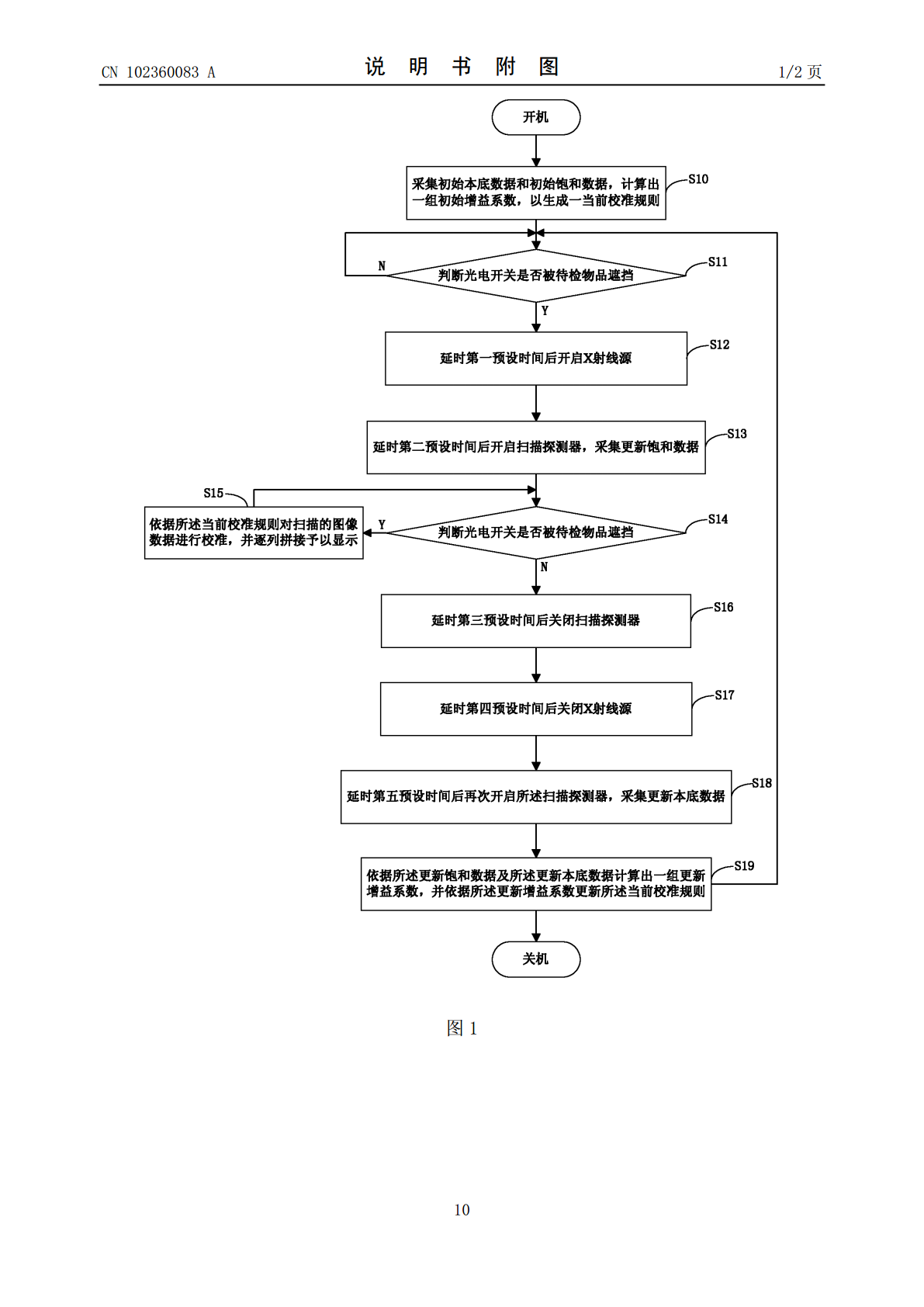
本发明提供一种应用于线扫描X射线安检机中图像去皮带伪影的方法,采用了基于光电开关触发方式的对待检物品进行逐包动态校准的方法,即每次包裹进入通道后触发光电开关,并以此为时基信号控制X射线开闭以及探测器采集等动作。当X射线开启后马上进行饱和数据采集,当包裹驶出通道X射线关闭后马上再进行本底数据采集,然后再通过校准算法计算得到新的校准参数。如此往复下去就能够对皮带任何位置进行校准处理,杜绝了图像中出现皮带伪影的现象,进而解决了现有技术中,X射线安检机的皮带跑偏或者边缘不规整时,校准参数不能自动对当前皮带状态进行

一种X射线图像中滤线栅伪影的抑制方法及装置.pdf
本发明公开一种X射线图像中滤线栅伪影的抑制方法及装置。其中,所述方法包括步骤:在垂直于原始的X射线图像的滤线栅的栅纹方向上对原始的X射线图像进行一维高通滤波;去除组织边缘的图像且根据连续栅纹的长度特征确定,确定并保留滤线栅的栅纹;根据原始的X射线图像在像素点(x,y)处的灰度值确定系数矩阵T,将第三栅纹图像与系数矩阵T对应点相乘得到最终的栅纹图像;在原始的X射线图像中减去最终的栅纹图像,得到抑制滤线栅伪影后的X射线图像。由于本发明在空域采用多特征确定滤线栅的栅纹的位置和强度,因此效率比较高,并且抑制滤线栅
X射线安检机.pdf
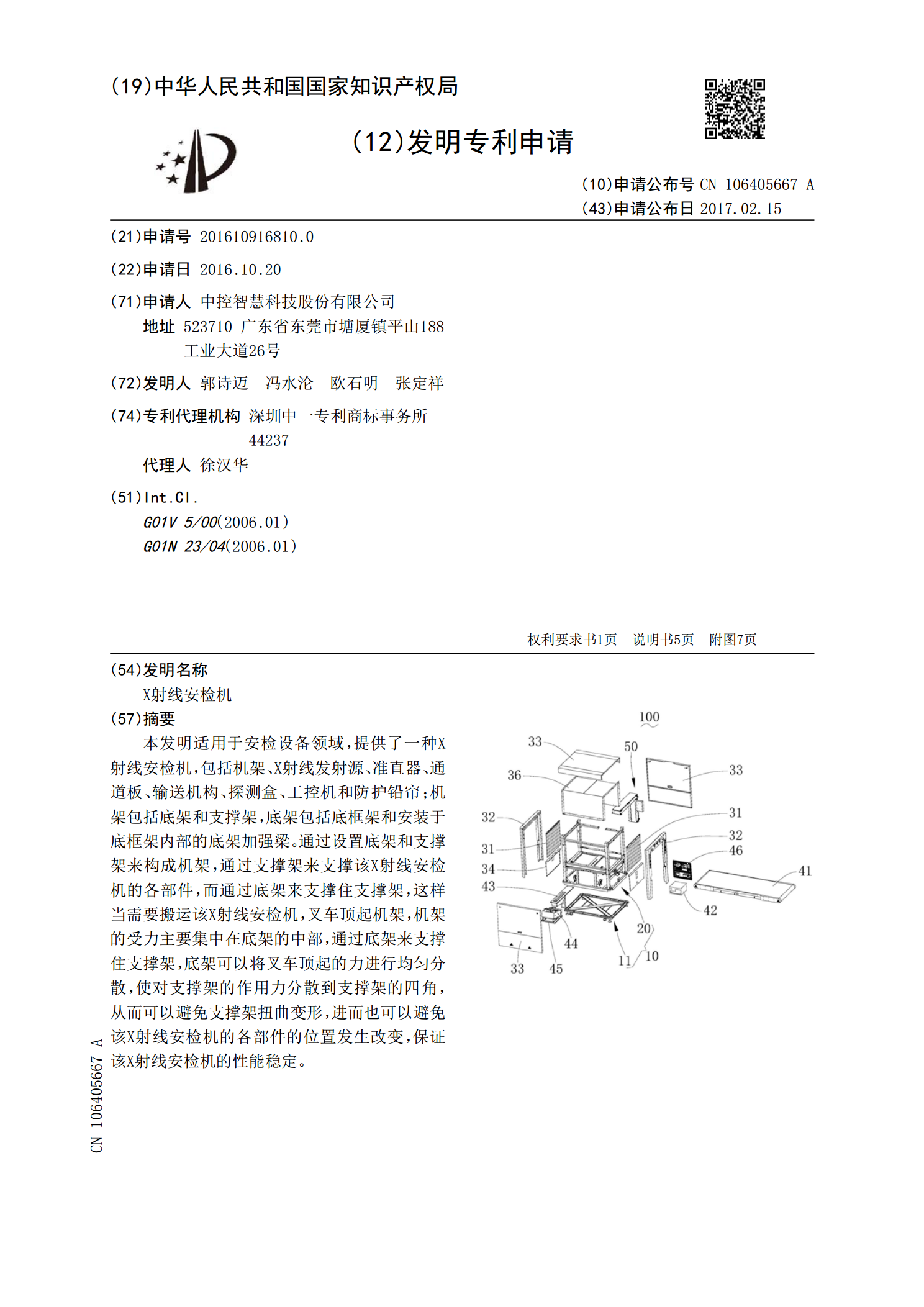
本发明适用于安检设备领域,提供了一种X射线安检机,包括机架、X射线发射源、准直器、通道板、输送机构、探测盒、工控机和防护铅帘;机架包括底架和支撑架,底架包括底框架和安装于底框架内部的底架加强梁。通过设置底架和支撑架来构成机架,通过支撑架来支撑该X射线安检机的各部件,而通过底架来支撑住支撑架,这样当需要搬运该X射线安检机,叉车顶起机架,机架的受力主要集中在底架的中部,通过底架来支撑住支撑架,底架可以将叉车顶起的力进行均匀分散,使对支撑架的作用力分散到支撑架的四角,从而可以避免支撑架扭曲变形,进而也可以避免该
图像去伪影方法、装置、设备及存储介质.pdf
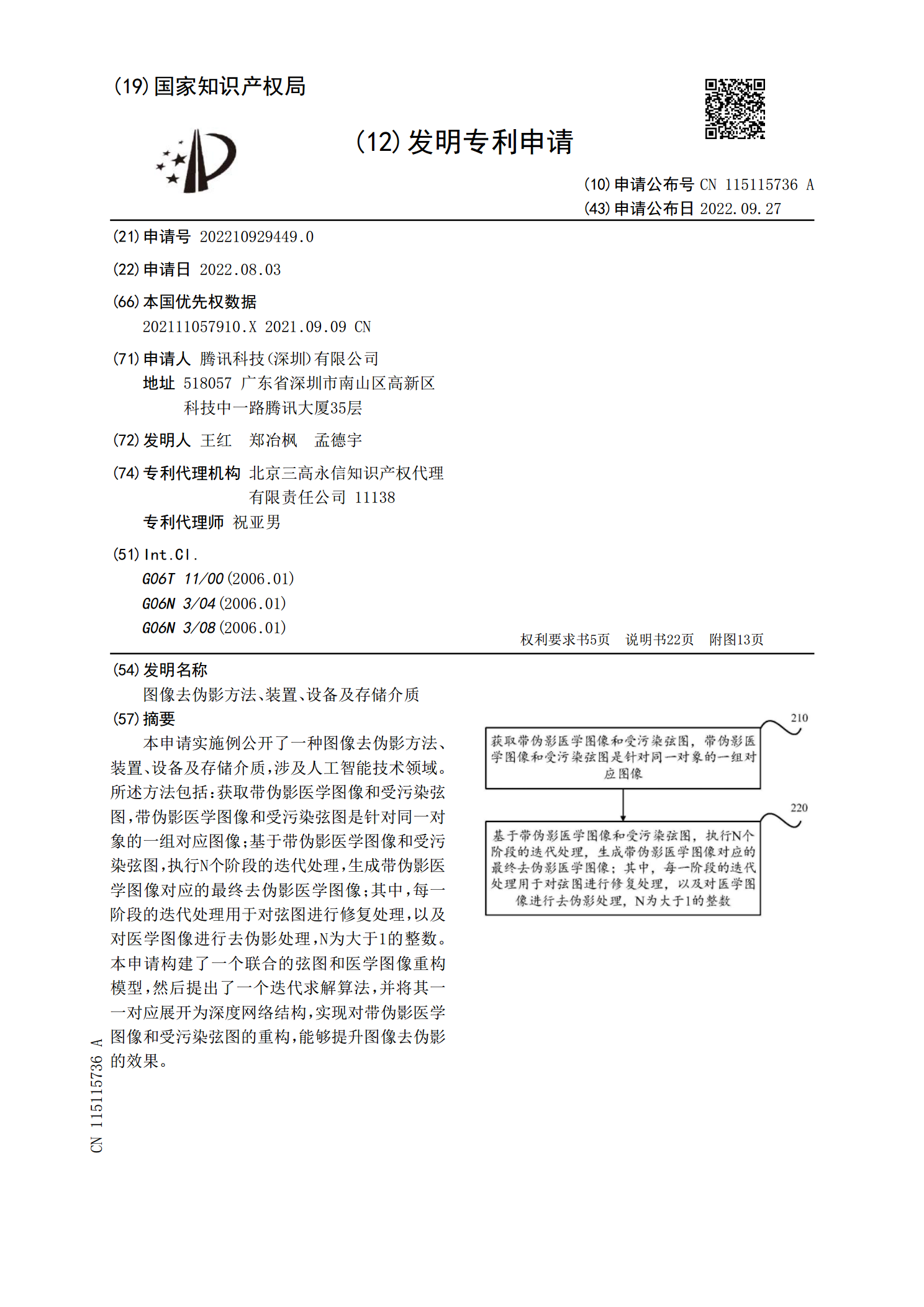
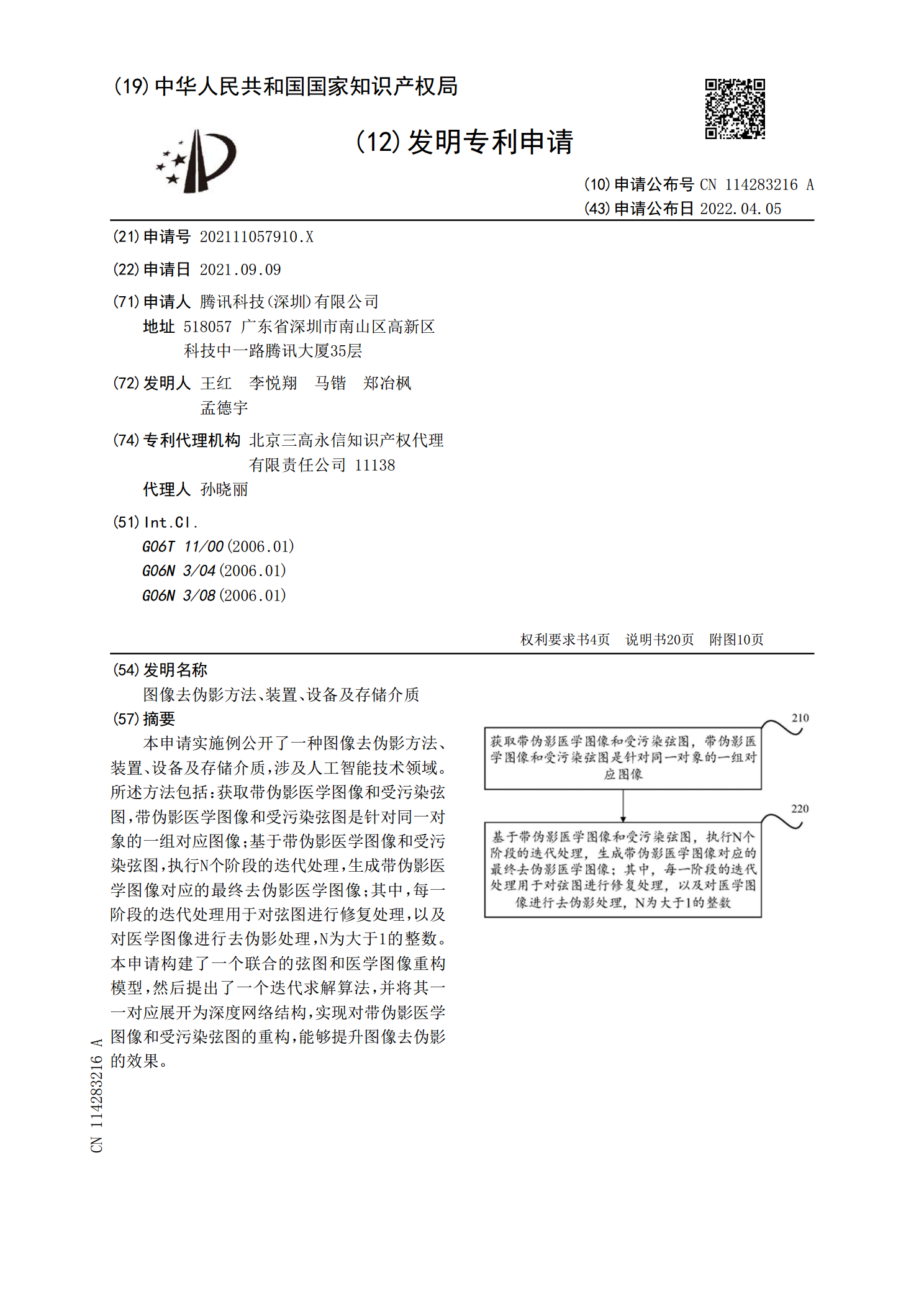
本申请实施例公开了一种图像去伪影方法、装置、设备及存储介质,涉及人工智能技术领域。所述方法包括:获取带伪影医学图像和受污染弦图,带伪影医学图像和受污染弦图是针对同一对象的一组对应图像;基于带伪影医学图像和受污染弦图,执行N个阶段的迭代处理,生成带伪影医学图像对应的最终去伪影医学图像;其中,每一阶段的迭代处理用于对弦图进行修复处理,以及对医学图像进行去伪影处理,N为大于1的整数。本申请构建了一个联合的弦图和医学图像重构模型,然后提出了一个迭代求解算法,并将其一一对应展开为深度网络结构,实现对带伪影医学图像和
图像去伪影方法、装置、设备及存储介质.pdf
本申请实施例公开了一种图像去伪影方法、装置、设备及存储介质,涉及人工智能技术领域。所述方法包括:获取带伪影医学图像和受污染弦图,带伪影医学图像和受污染弦图是针对同一对象的一组对应图像;基于带伪影医学图像和受污染弦图,执行N个阶段的迭代处理,生成带伪影医学图像对应的最终去伪影医学图像;其中,每一阶段的迭代处理用于对弦图进行修复处理,以及对医学图像进行去伪影处理,N为大于1的整数。本申请构建了一个联合的弦图和医学图像重构模型,然后提出了一个迭代求解算法,并将其一一对应展开为深度网络结构,实现对带伪影医学图像和