
具有可变飞行特性的多旋翼直升机.pdf

秀美****甜v


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共31页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

具有可变飞行特性的多旋翼直升机.pdf
提供一种飞行器(40a),该飞行器包括多个臂(41、42、43、44),其中,选定的臂或者能够调整其长度,使臂节段可操作成在二维或三维中绕铰接接头运动,或者能够使得一个臂可操作成调整一个臂与另一臂之间的角度,或者能够实现前述内容的任意组合。推力发生器可重定位地安装在所述选定臂上,控制系统使得能够在飞行中和在地面上保持对飞行器的方向控制的同时:自动、机载或远程控制推力发生器;对臂上的推力发生器进行重定位;调整选定臂的长度;使选定臂绕铰接接头运动以及调整两个或更多臂之间的角度。飞行器具有超过现有设计的操作能力
多旋翼直升机.pdf
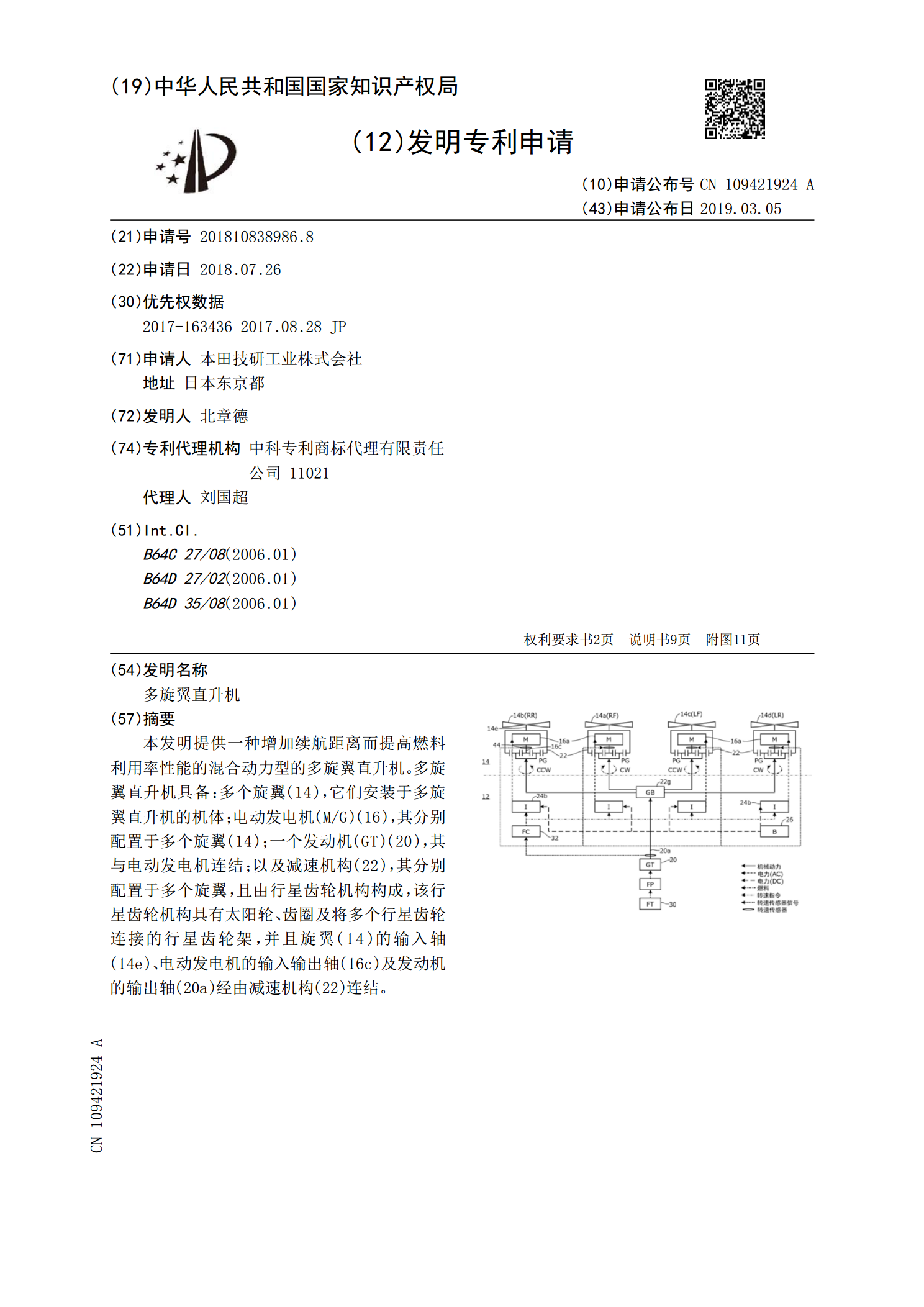
本发明提供一种增加续航距离而提高燃料利用率性能的混合动力型的多旋翼直升机。多旋翼直升机具备:多个旋翼(14),它们安装于多旋翼直升机的机体;电动发电机(M/G)(16),其分别配置于多个旋翼(14);一个发动机(GT)(20),其与电动发电机连结;以及减速机构(22),其分别配置于多个旋翼,且由行星齿轮机构构成,该行星齿轮机构具有太阳轮、齿圈及将多个行星齿轮连接的行星齿轮架,并且旋翼(14)的输入轴(14e)、电动发电机的输入输出轴(16c)及发动机的输出轴(20a)经由减速机构(22)连结。

一种可变轴距的多旋翼飞行器.pdf
本发明一种可变轴距的多旋翼飞行器涉及航空飞行器领域,特别是一种可变轴距的六轴多旋翼飞行器。包括机体、电机、电机座、叶浆、支撑短臂、变距机臂和齿轮传动装置;电机、电机座、叶浆、支撑短臂、变距机臂和齿轮传动装置组成旋翼;所述机体由上、下两块正六边形机架夹合而成,上机架为上机体,下机架为下机体;整个机体为正六边体;机体通过连接扣与支撑短臂相连;电机座安装在远离支撑短臂的变距机臂端部,电机卡嵌在电机座顶端;支撑短臂通过连接隼和连接扣与变距机臂相连,形成硬性连接;叶浆与电机通过螺纹连接;在下机体下部安装有步进电机;

多旋翼飞行原理.docx
四旋翼飞行器结构和原理1.结构形式旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。结构形式如图1.1所示。.工作原理四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。四旋翼飞行器的电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转

电控旋翼直升机飞行动力学特性研究的中期报告.docx
电控旋翼直升机飞行动力学特性研究的中期报告摘要:本文旨在介绍电控旋翼直升机(ERH)的飞行动力学特性研究中期报告。首先,本文简要介绍了电控旋翼直升机的基本结构和特点。其次,针对ERH的飞行动力学问题,本文提出了一种基于MATLAB/Simulink的模型,包括主旋翼、尾旋翼、电机和电子控制系统等模块。然后,本文对ERH的主旋翼和尾旋翼进行了建模和仿真,分析了旋翼转速、迎角、侧滑角等参数对ERH飞行动力学特性的影响。最后,本文根据仿真结果,探讨了ERH的飞行控制问题,并提出了一种基于PID控制的控制策略。总