
一种基于标签识别的定位块出入库方法及设备.pdf

运升****魔王


1/9

2/9
3/9
4/9
5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于标签识别的定位块出入库方法及设备.pdf
本发明提供一种基于标签识别的定位块出入库方法,入库时,上位机收集定位块尺寸数据和被贴上标签的定位块标签数据;控制器读入上位机所存储的定位块尺寸数据以及与定位块一一对应的标签数据,并为每一定位块在仓库中指定一放置仓;抓取机构将经标签读头识别后的定位块传送至相应的放置仓内。出库时,上位机根据待组装工件的尺寸要求指定需要的定位块组;控制器读入上位机指定的符合要求的定位块的尺寸数据和标签数据;抓取机构将符合要求的定位块传送至盛具内。该出入库方法可以有效的杜绝人为取错定位块,防止由于定位块错选而导致组装工件加工的偏

一种基于RFID识别的设备定位方法.pdf
本发明提供的一种基于RFID识别的设备定位方法,涉及射频识别技术领域。在本发明中,设备定位方法包括:获取射频识别设备发送的多条运行定位数据,其中,多个射频识别设备分别设置于目标生产设备的多个目标生产结构,每一个射频识别设备用于在目标生产设备的生产过程中采集对应的目标生产结构的当前位置数据,得到对应的多条运行定位数据;基于每一个射频识别设备发送的多条运行定位数据,进行体征提取处理得到对应的运行定位特征信息;基于运行定位特征信息对目标生产设备的设备性能进行定位处理,得到对应的设备性能参数。基于上述设备定位方法
一种基于定位的区域光标签快速部署方法.pdf
本发明公开了一种基于定位的区域光标签快速部署方法,包括:1)现初步在待部署区域部署光标签;2)将若干台机器人放置到待部署区域中,其中,各台机器人上均安装有基于光标签定位的移动识别设备;3)机器人在待部署区域进行随机游走行进,机器人在行进过程中,机器人上的基于光标签定位的移动识别设备对机器人进行定位,当定位成功时,则机器人继续行进;当没有定位成功时,则机器人停止行进,并机器人当前所在区域记作定位盲区,并执行步骤4);当机器人遍历完待部署光标签区域后,没有发现定位盲区时,完成光标签的部署;4)根据定位盲区的形
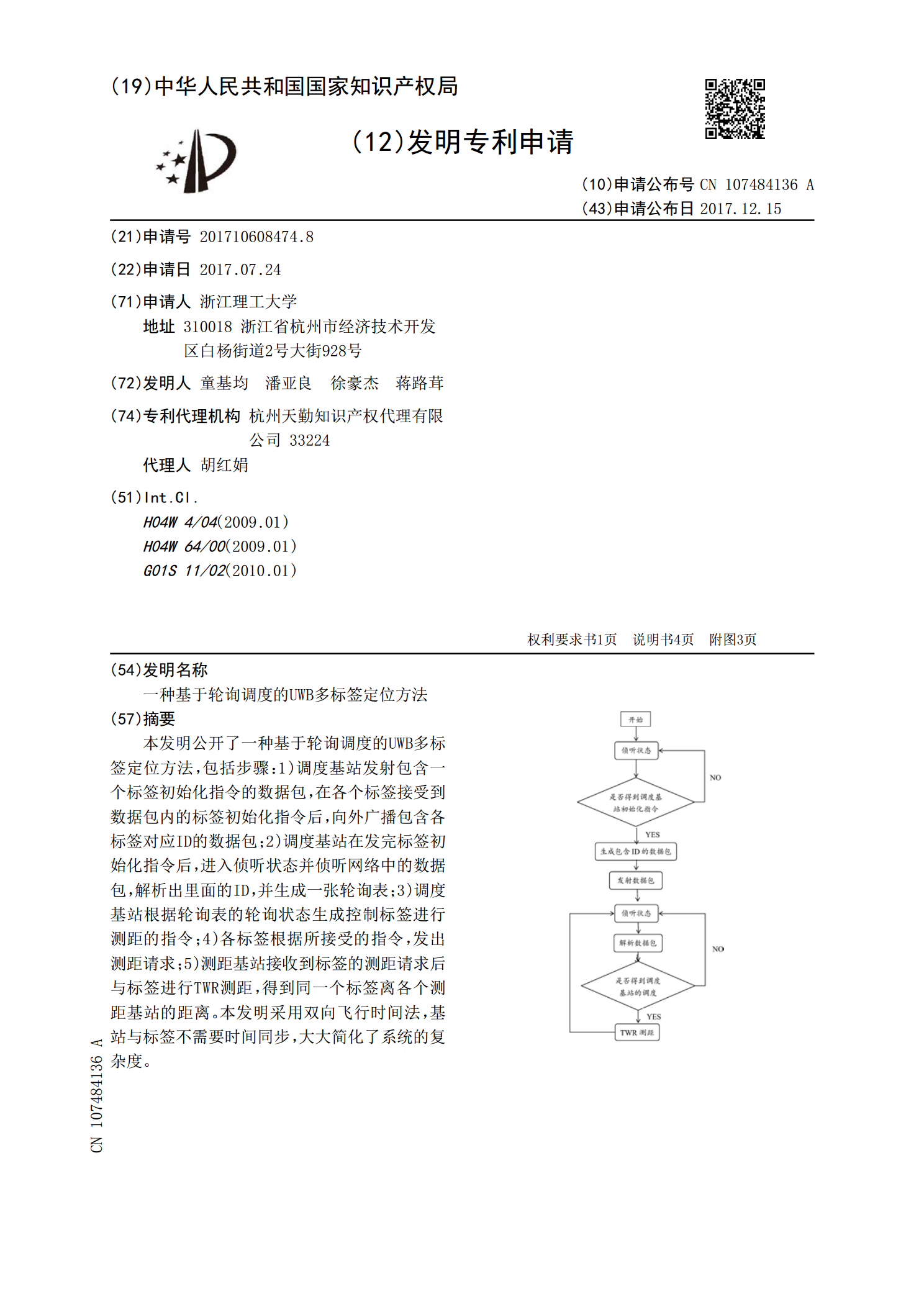
一种基于轮询调度的UWB多标签定位方法.pdf
本发明公开了一种基于轮询调度的UWB多标签定位方法,包括步骤:1)调度基站发射包含一个标签初始化指令的数据包,在各个标签接受到数据包内的标签初始化指令后,向外广播包含各标签对应ID的数据包;2)调度基站在发完标签初始化指令后,进入侦听状态并侦听网络中的数据包,解析出里面的ID,并生成一张轮询表;3)调度基站根据轮询表的轮询状态生成控制标签进行测距的指令;4)各标签根据所接受的指令,发出测距请求;5)测距基站接收到标签的测距请求后与标签进行TWR测距,得到同一个标签离各个测距基站的距离。本发明采用双向飞行时
一种基于UWB定位系统的获得标签定位坐标的方法.pdf
本发明提供了一种基于UWB定位系统的获得标签定位坐标的方法,待定位目标所携带的标签向其周围布署不少于3个用于定位的基站发送无线电信号,基站测量并记录N+1个所述标签的TOA值,利用经校准后的TOA值,优化定位坐标的算法,并通过卡尔曼滤波器算法过滤掉噪声,得到所述标签的最终定位坐标值。本发明可以在适用于超过3个信号接收装置时的应用场合时,确保定位结果的实时性和稳定性,并且也很好地改善了因噪声干扰而带来的定位结果不稳定的问题。