
一种基于定位的区域光标签快速部署方法.pdf

莉娜****ua


1/7

2/7

3/7

4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于定位的区域光标签快速部署方法.pdf
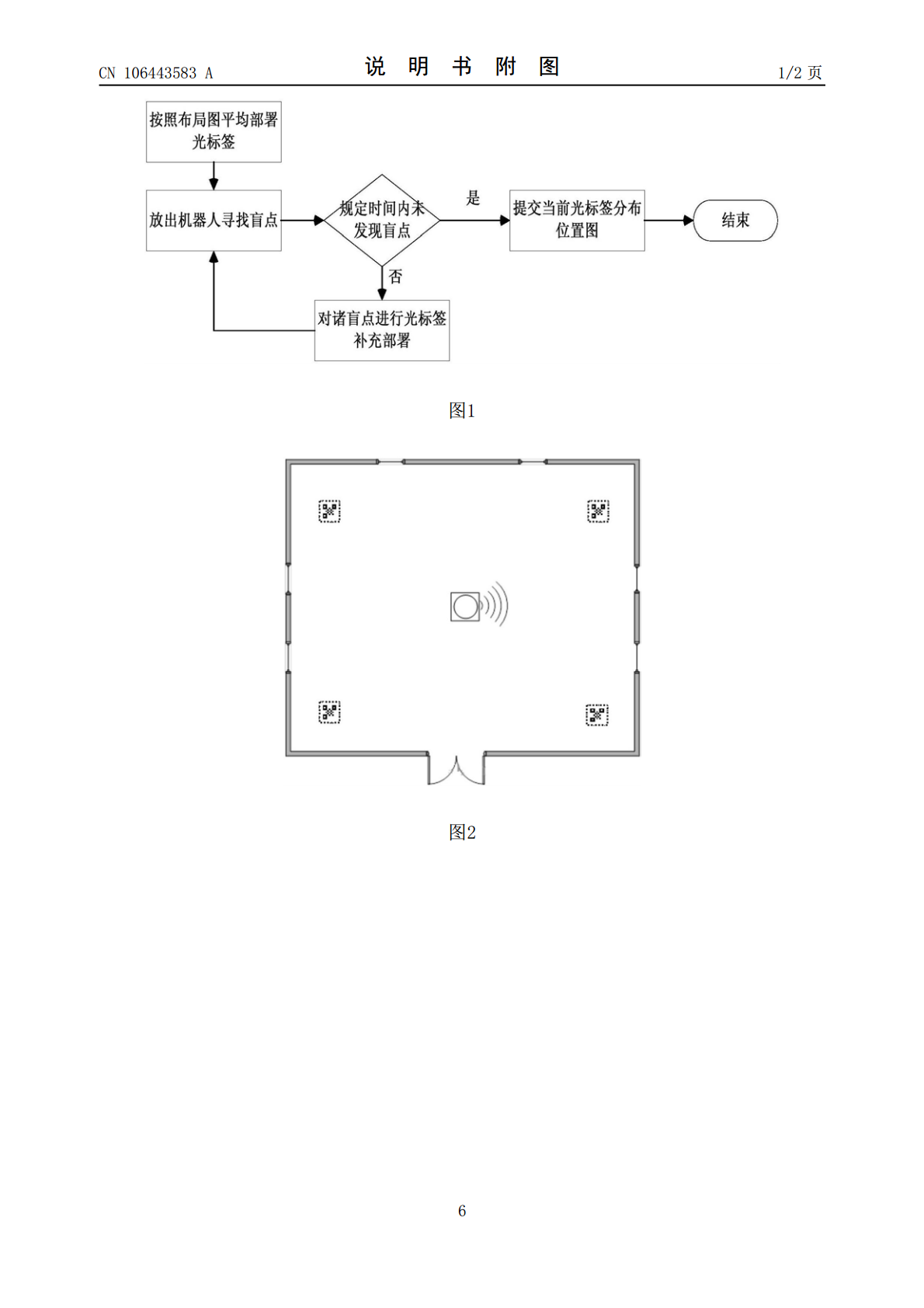
本发明公开了一种基于定位的区域光标签快速部署方法,包括:1)现初步在待部署区域部署光标签;2)将若干台机器人放置到待部署区域中,其中,各台机器人上均安装有基于光标签定位的移动识别设备;3)机器人在待部署区域进行随机游走行进,机器人在行进过程中,机器人上的基于光标签定位的移动识别设备对机器人进行定位,当定位成功时,则机器人继续行进;当没有定位成功时,则机器人停止行进,并机器人当前所在区域记作定位盲区,并执行步骤4);当机器人遍历完待部署光标签区域后,没有发现定位盲区时,完成光标签的部署;4)根据定位盲区的形

一种基于区域划分的标签压缩方法.pdf
本发明提供一种基于区域划分的标签压缩方法,该方法包括以下步骤:步骤一:确定关键节点与普通节点;步骤二:划分区域,将节点按照直连关系划分区域,当关键节同时属于多个区域时,充当连接区域的媒介;步骤三:计算属于同一区域内任意两普通节点间的路径;步骤四:计算关键节点间的路径;步聚五:拼接除关键节点间以外的路径;该方法还针对拓扑中没有关键节点及没有普通节点的情况,提出了相应的路径计算方法,完成路径计算之后,只保留路径中的关键节点和中继节点,即完成了标签压缩,无需二次计算。该标签压缩方法降低了计算量,提供了灵活、轻便
一种检测罐体标签快速定位装置.pdf
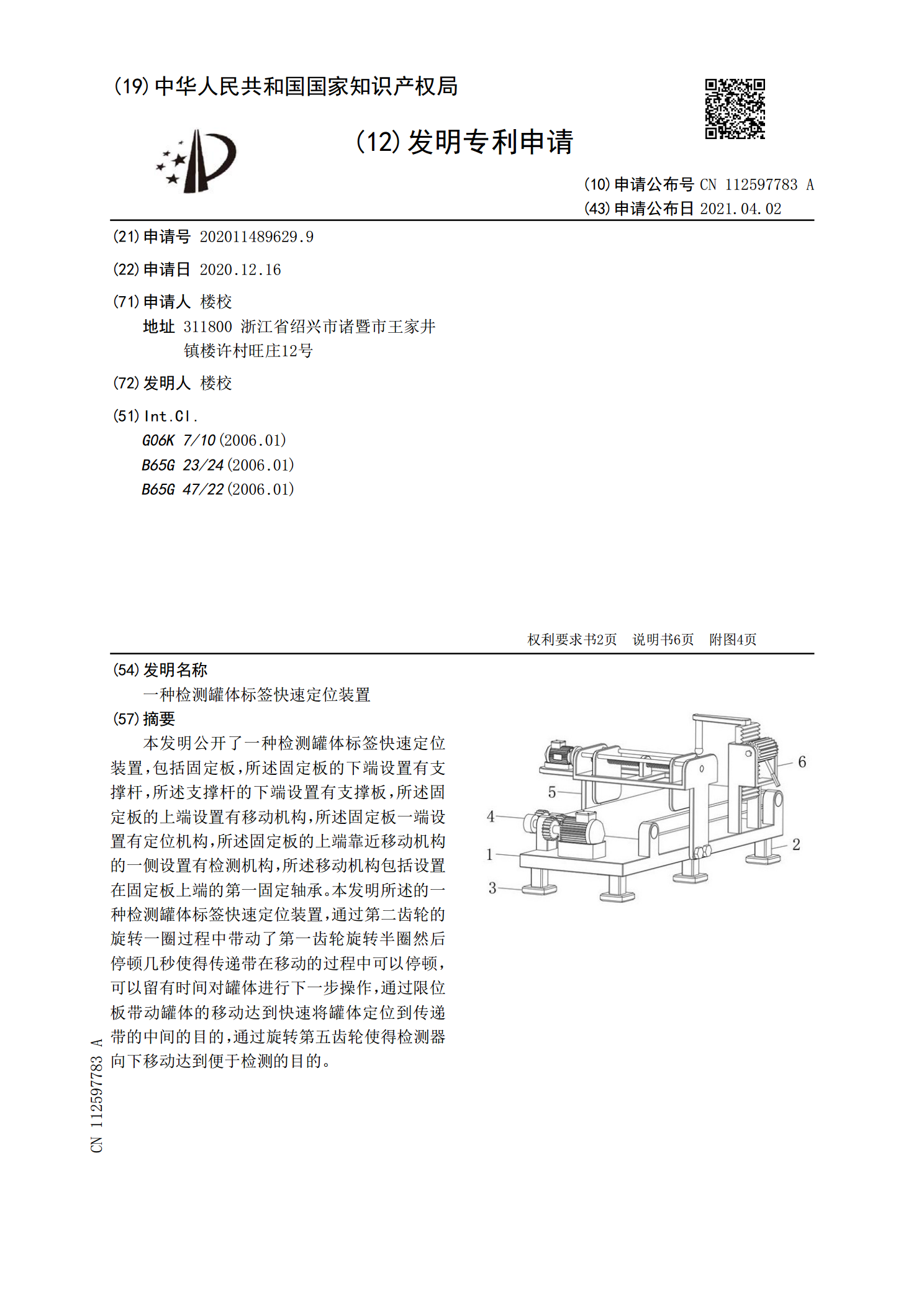
本发明公开了一种检测罐体标签快速定位装置,包括固定板,所述固定板的下端设置有支撑杆,所述支撑杆的下端设置有支撑板,所述固定板的上端设置有移动机构,所述固定板一端设置有定位机构,所述固定板的上端靠近移动机构的一侧设置有检测机构,所述移动机构包括设置在固定板上端的第一固定轴承。本发明所述的一种检测罐体标签快速定位装置,通过第二齿轮的旋转一圈过程中带动了第一齿轮旋转半圈然后停顿几秒使得传递带在移动的过程中可以停顿,可以留有时间对罐体进行下一步操作,通过限位板带动罐体的移动达到快速将罐体定位到传递带的中间的目的,

一种基于微服务架构的快速部署方法.pdf
本发明公开了一种基于微服务架构的快速部署方法,包括以下步骤:步骤1:获取归属于待部署微服务的算法文件;确定所述待部署微服务的编程语言类型;步骤2:客户端的部署模块根据指定的工P与服务端进行socket通讯;接收模块对请求进行监听,如果发现有客户端对部署服务进行请求,则对要部署的程序进行接收;本发明对于待部署微服务,能够获取归属于该待部署微服务的算法文件并识别确定待部署微服务的编程语言类型,从而基于该编程语言类型,生成对应待部署微服务的多种AP工接口。由于每种AP工接口分别对应一种编程语言类,因此基于该算法

基于区域分割的快速KNN定位算法.docx
基于区域分割的快速KNN定位算法一、引言:随着无线通信技术的迅速发展,定位技术在移动互联网领域中扮演了至关重要的角色。在广泛的应用中,KNN算法的定位精度高、实现简单,已经被广泛采用。然而,KNN算法的计算复杂度很高,如何提高算法的定位速度是众多学者所关注的问题。本文提出了一种基于区域分割的快速KNN定位算法,从而缩短KNN算法计算时间,提高算法效率。二、相关工作:KNN算法是一种简单的分类算法,它可以快速找到它周围最近的k个邻居,进而进行定位、预测等等。其基本流程为:输入n个训练样本及一个待测样本,按照