
一种泡塑机泡塑产品自动提取机械手.pdf

睿德****找我

1/7
2/7
3/7
4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种泡塑机泡塑产品自动提取机械手.pdf
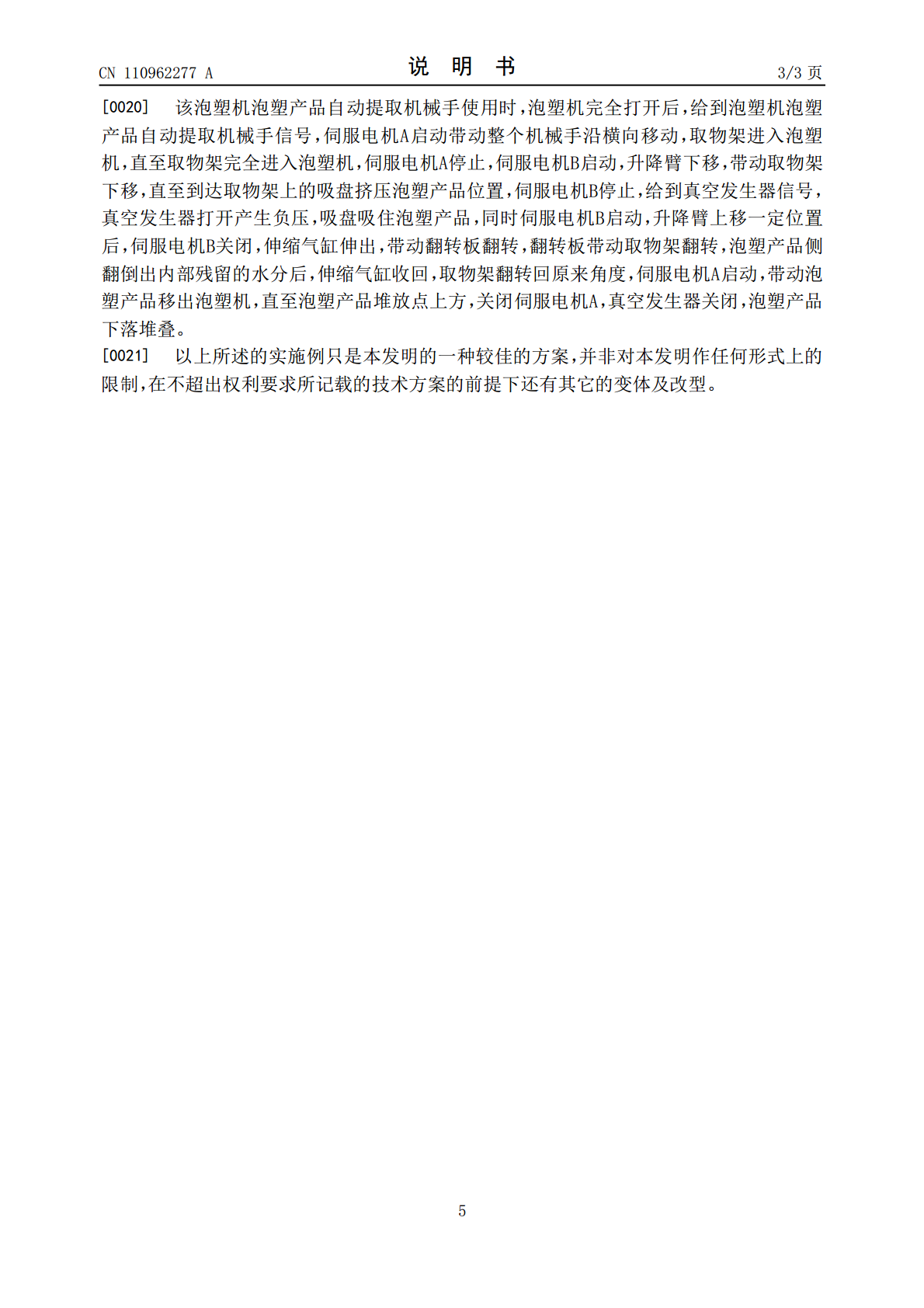
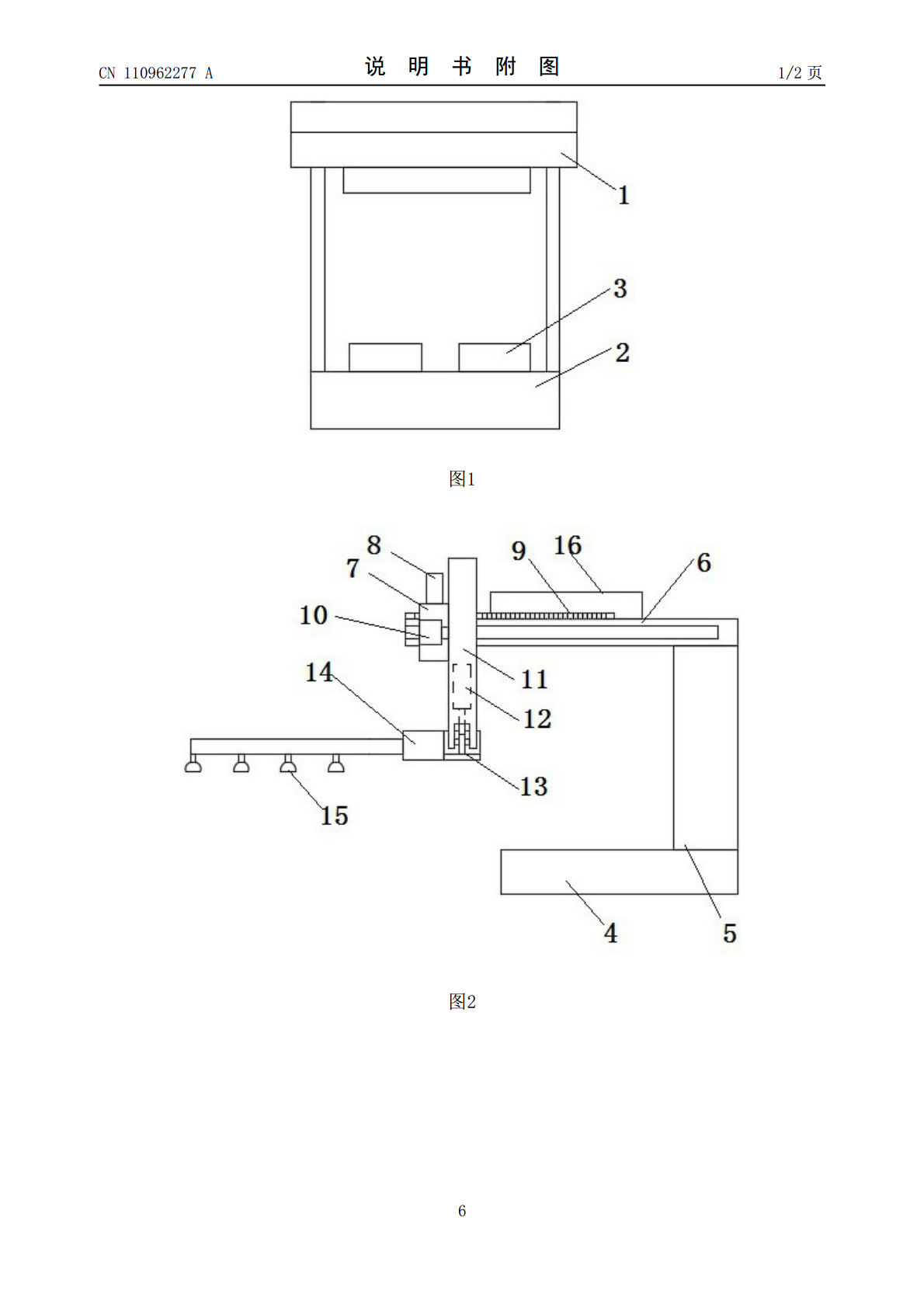
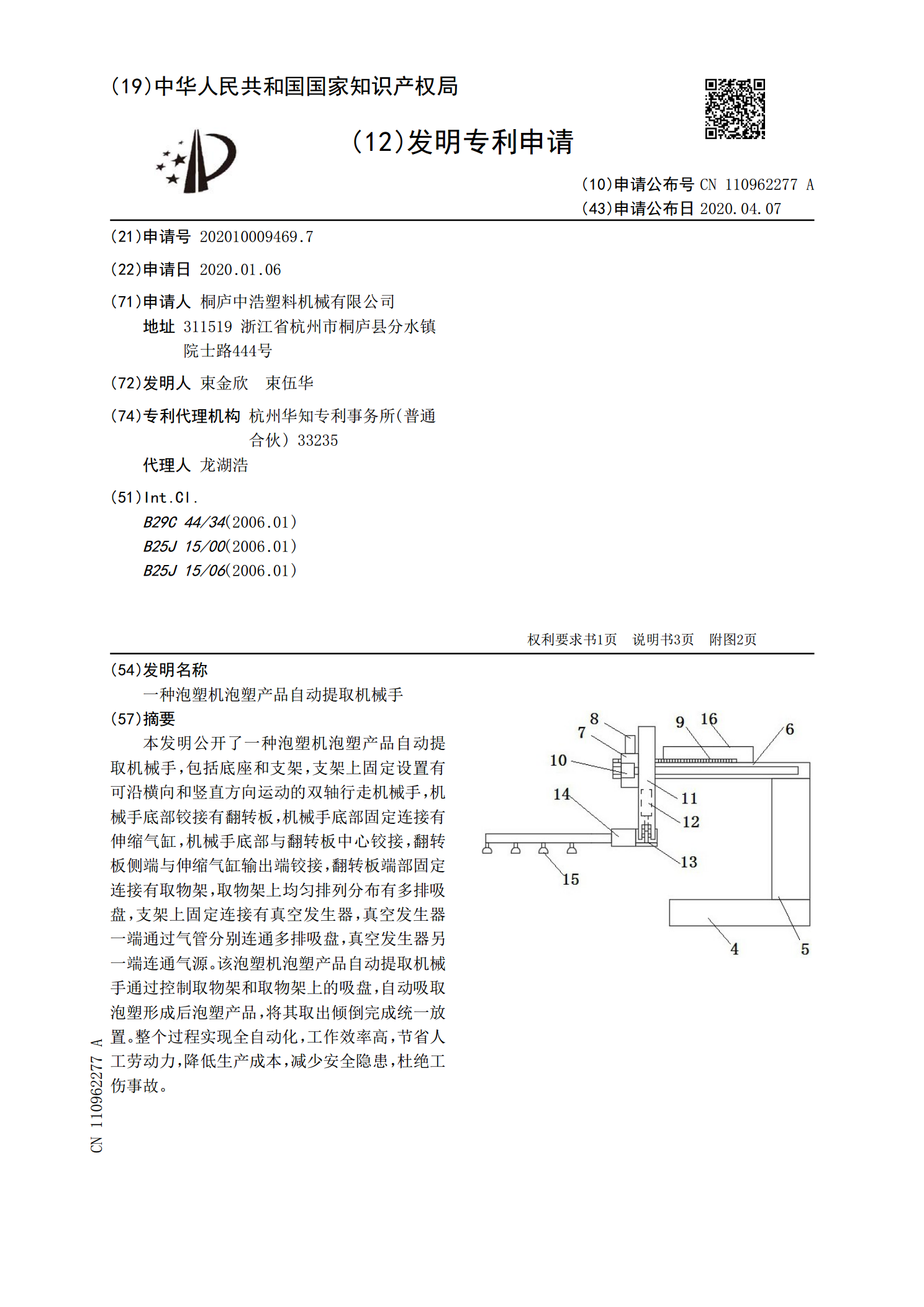
本发明公开了一种泡塑机泡塑产品自动提取机械手,包括底座和支架,支架上固定设置有可沿横向和竖直方向运动的双轴行走机械手,机械手底部铰接有翻转板,机械手底部固定连接有伸缩气缸,机械手底部与翻转板中心铰接,翻转板侧端与伸缩气缸输出端铰接,翻转板端部固定连接有取物架,取物架上均匀排列分布有多排吸盘,支架上固定连接有真空发生器,真空发生器一端通过气管分别连通多排吸盘,真空发生器另一端连通气源。该泡塑机泡塑产品自动提取机械手通过控制取物架和取物架上的吸盘,自动吸取泡塑形成后泡塑产品,将其取出倾倒完成统一放置。整个过程
高速铝塑泡罩机.pdf
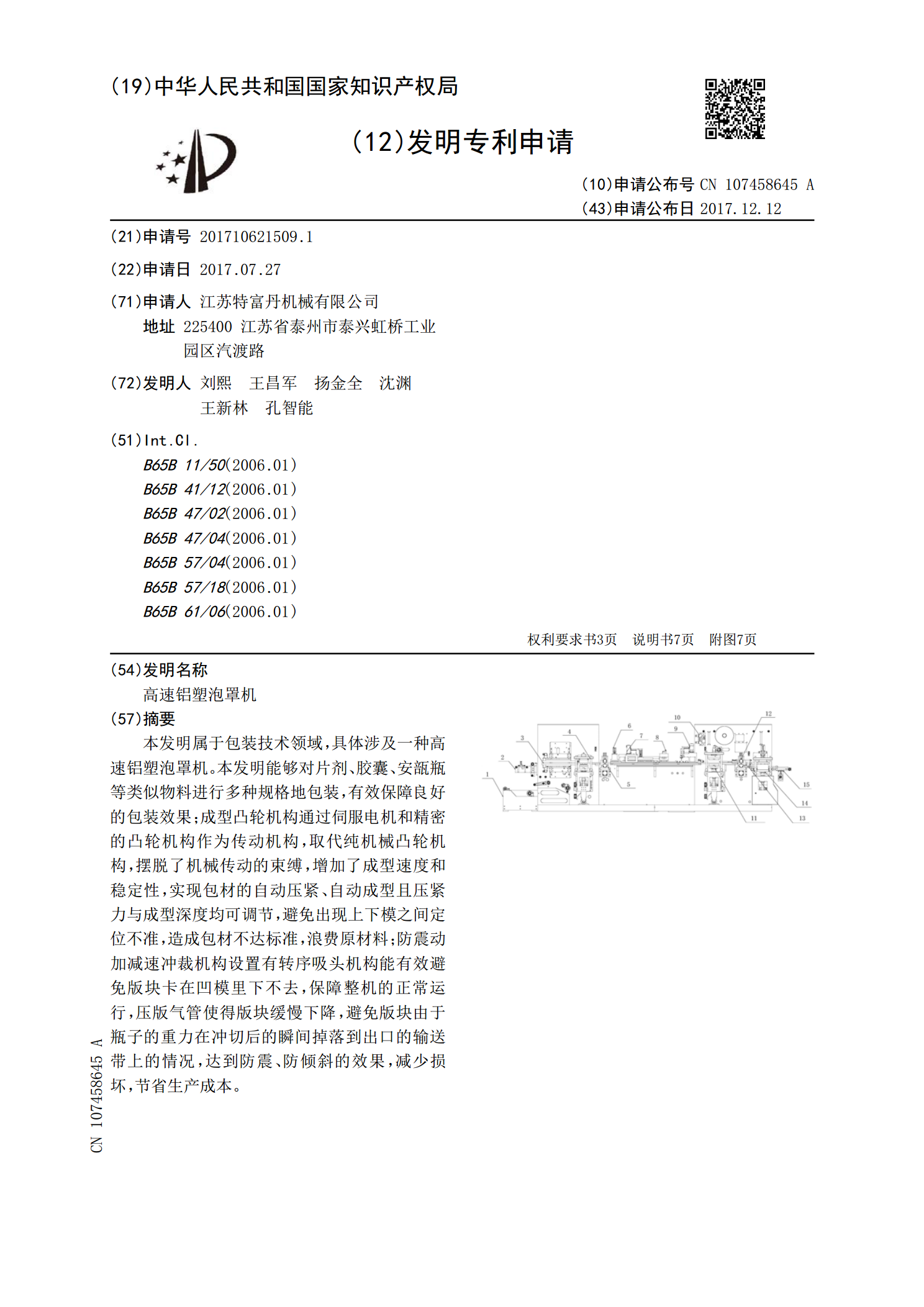
本发明属于包装技术领域,具体涉及一种高速铝塑泡罩机。本发明能够对片剂、胶囊、安瓿瓶等类似物料进行多种规格地包装,有效保障良好的包装效果;成型凸轮机构通过伺服电机和精密的凸轮机构作为传动机构,取代纯机械凸轮机构,摆脱了机械传动的束缚,增加了成型速度和稳定性,实现包材的自动压紧、自动成型且压紧力与成型深度均可调节,避免出现上下模之间定位不准,造成包材不达标准,浪费原材料;防震动加减速冲裁机构设置有转序吸头机构能有效避免版块卡在凹模里下不去,保障整机的正常运行,压版气管使得版块缓慢下降,避免版块由于瓶子的重力在

一种泡塑机的包装装置.pdf
本发明涉及泡塑机技术领域,且公开了一种泡塑机的包装装置,包括传送带,所述传送带的一侧设置有主动轮,所述主动轮的一侧固定连接有电机,所述传送带的远离主动轮的一侧设置有从动轮,所述传送带的两侧均搭接有挡板,所述挡板的底部固定连接有支撑座,所述支撑座的一侧固定连接有支撑架。该泡塑机的包装装置解决了现有的泡塑机生产的泡塑成品需要另外进行输送包装导致效率低下的问题,通过传送带、主动轮、电机、从动轮、挡板、支撑座、支撑架、接料筐、固定板、控制箱、空腔、第一电动推杆、第一封口板、第二电动推杆、第二封口板和加热装置,使得
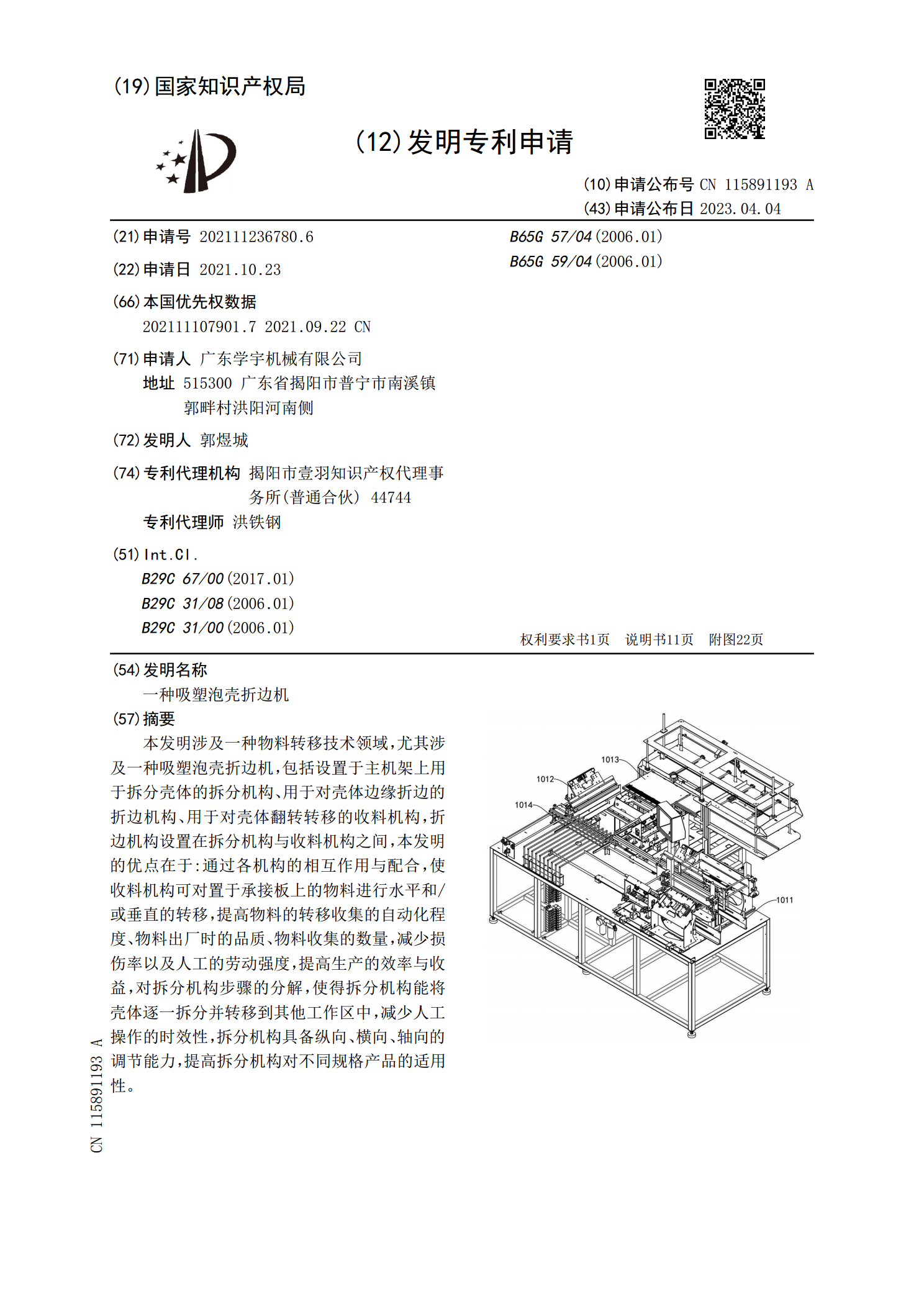
一种吸塑泡壳折边机.pdf
本发明涉及一种物料转移技术领域,尤其涉及一种吸塑泡壳折边机,包括设置于主机架上用于拆分壳体的拆分机构、用于对壳体边缘折边的折边机构、用于对壳体翻转转移的收料机构,折边机构设置在拆分机构与收料机构之间,本发明的优点在于:通过各机构的相互作用与配合,使收料机构可对置于承接板上的物料进行水平和/或垂直的转移,提高物料的转移收集的自动化程度、物料出厂时的品质、物料收集的数量,减少损伤率以及人工的劳动强度,提高生产的效率与收益,对拆分机构步骤的分解,使得拆分机构能将壳体逐一拆分并转移到其他工作区中,减少人工操作的时
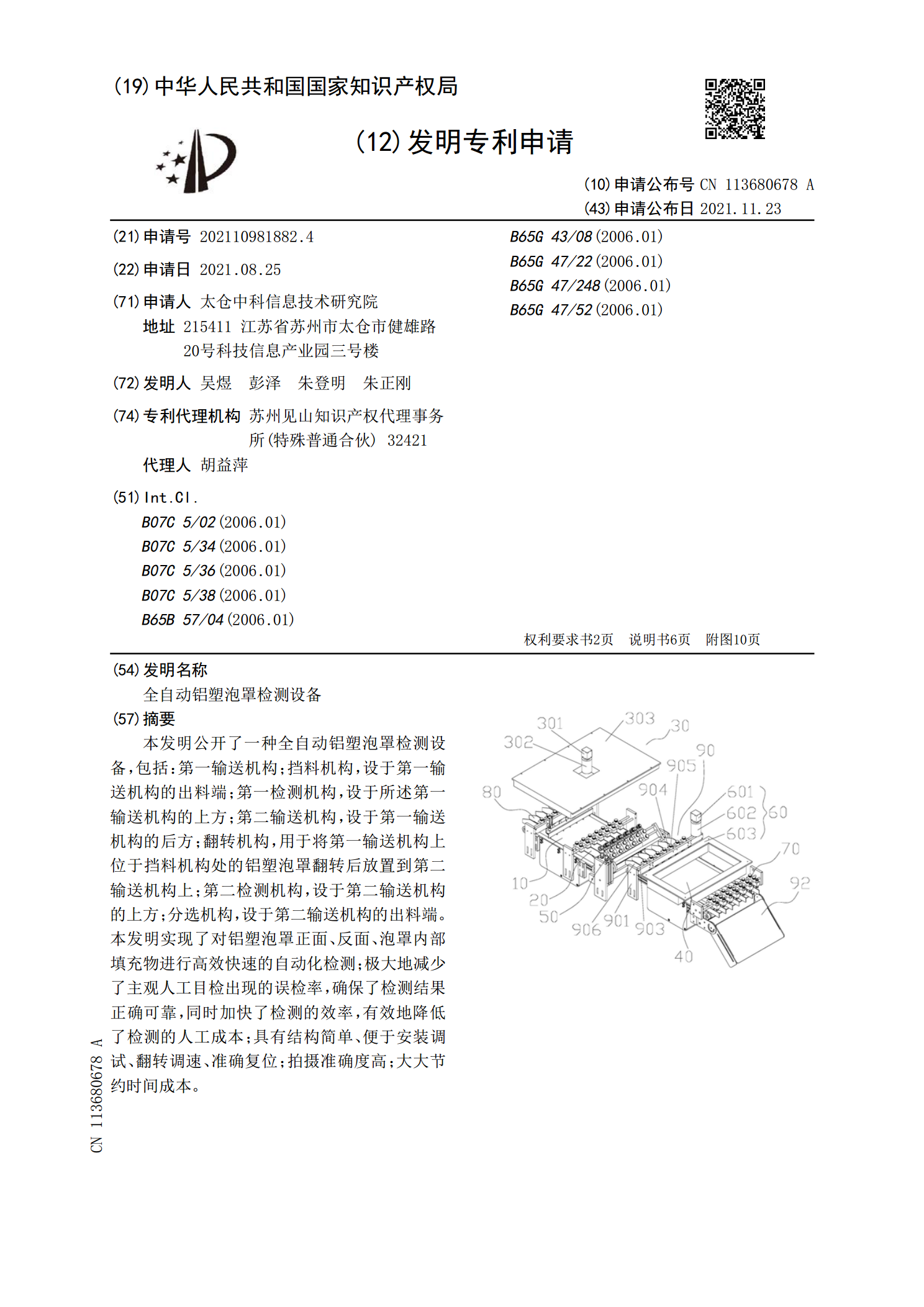
全自动铝塑泡罩检测设备.pdf
本发明公开了一种全自动铝塑泡罩检测设备,包括:第一输送机构;挡料机构,设于第一输送机构的出料端;第一检测机构,设于所述第一输送机构的上方;第二输送机构,设于第一输送机构的后方;翻转机构,用于将第一输送机构上位于挡料机构处的铝塑泡罩翻转后放置到第二输送机构上;第二检测机构,设于第二输送机构的上方;分选机构,设于第二输送机构的出料端。本发明实现了对铝塑泡罩正面、反面、泡罩内部填充物进行高效快速的自动化检测;极大地减少了主观人工目检出现的误检率,确保了检测结果正确可靠,同时加快了检测的效率,有效地降低了检测的人