
一种自动垃圾分类系统和方法.pdf

论文****轩吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种自动垃圾分类系统和方法.pdf
本发明涉及一种自动垃圾分类系统包括垃圾分拣容器、主控制器、子控制器、机械手模块、侧方位摄像头和俯视摄像头模块;垃圾分拣容器包括处理仓和至少一种垃圾桶,处理仓用于容纳待分拣垃圾,垃圾桶用于容纳各类型垃圾;机械手模块包括机械手,机械手设置在处理仓顶部;侧方位摄像头设置在处理仓侧壁中部;俯视摄像头模块包括两个可调焦摄像头,两个可调焦摄像头分别设置在处理仓顶部不相邻的位置;主控制器包括逻辑控制模块和神经网络模块;逻辑控制模块用于控制垃圾分类流程;子控制器与逻辑控制模块和机械手连接,控制机械手移动。本发明通过视觉识
一种垃圾自动分类系统及方法.pdf
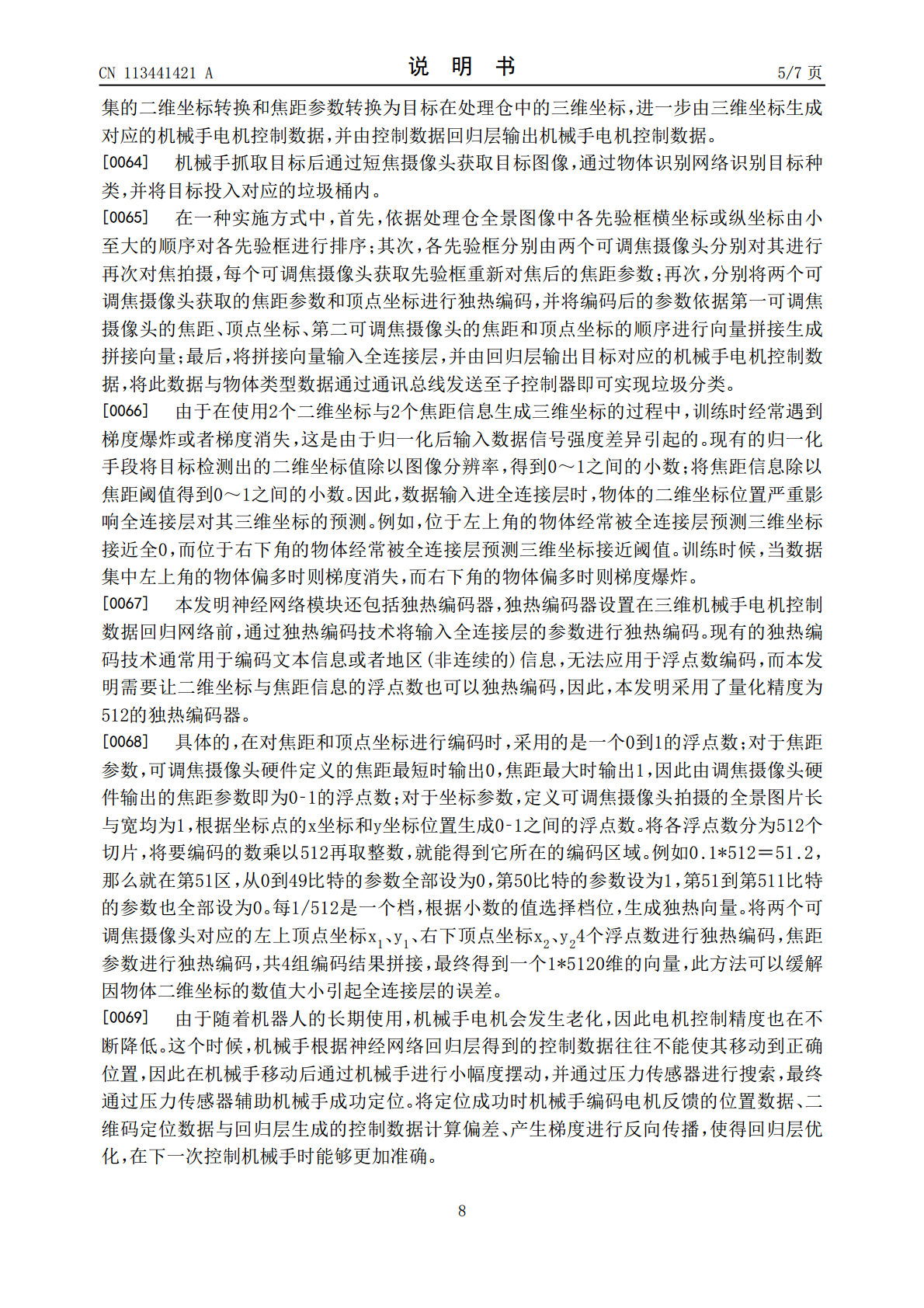
本发明公开了一种垃圾自动分类系统及方法,属于垃圾分类技术领域。包括机架和垃圾桶,安装在机架上的触发器、摄像头、中央处理器、滑动轨道、分类执行器、垃圾接收平台和安装在滑动轨道上的激光扫描仪,激光扫描仪与滑动轨道滑动连接;中央处理器分别与触发器、摄像头、分类执行器、垃圾接收平台和激光扫描仪连接,并控制其运行。本发明使用图像与三维点云结合的方式对垃圾进行扫描获取彩色轮廓,并进行高准确度的自动分类;可视情况分成多种类别,仅需增加分类执行器和垃圾桶即可;本发明可对带火星的物质进行识别,并直接进行喷淋,杜绝了火源进入
一种自动垃圾分类的智能垃圾桶和制备方法.pdf
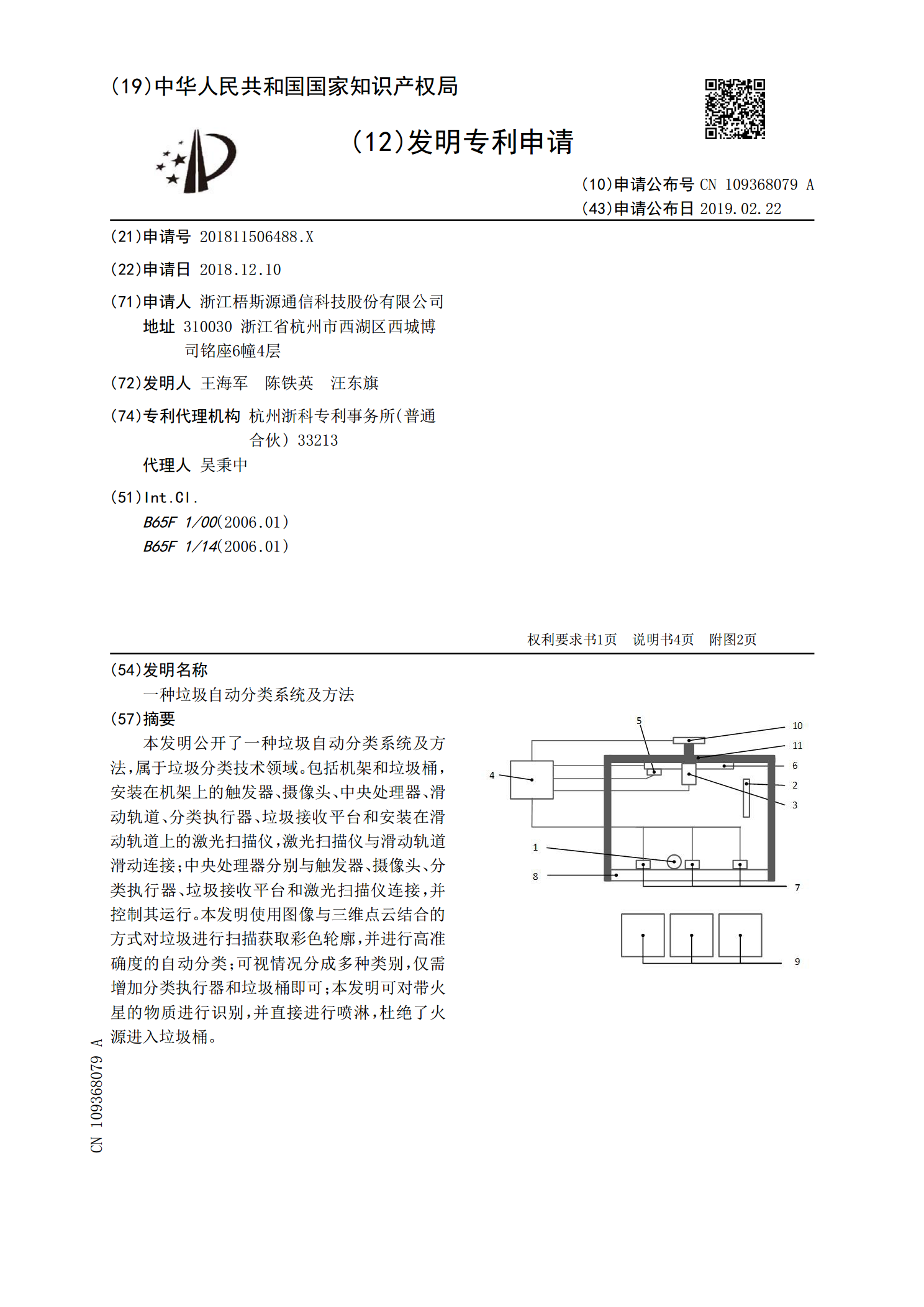
本发明公开了一种自动垃圾分类的智能垃圾桶和制备方法,该垃圾桶包括主桶体、桶盖、推扫扇、分桶和分桶门五个部分,以及触发开关、语音识别模块、推扫扇马达、分桶门马达和限位器关键元器件,制备方法包括四个步骤,即制作主桶体,中间的十字支撑杆用来固定推扫扇和推扫扇马达;制作横截面为1/4圆的四个分桶;制作桶盖,桶盖上方放置触发开关,内部放置语音识别模块,模块的麦克风和扬声器位置制作蜂窝多孔结构;制作分桶门,分桶门下方放置马达,主桶体相应位置放置限位器。本发明的优点是:能智能进行垃圾分类,解决了用户不能正确垃圾分类的难

一种基于垃圾识别的垃圾分类系统和方法.pdf
本发明提供一种基于垃圾识别的垃圾分类系统和方法,涉及垃圾分类处理领域。所述基于垃圾识别的垃圾分类系统通过数据爬虫、图像识别器和语意识别器相结合,将互联网上有关“可回收垃圾”、“有害垃圾”、“厨余垃圾”和“其他垃圾”的图片爬取下来,通过图像识别器为图片打上标签,通过语意识别器将“实物名词”保留到“垃圾分类标签库”中,通过建立“垃圾分类标签库”并将用户所上传图像的标签在“垃圾分类标签库”中进行检索,从而实现对垃圾的识别分类,无需人工对训练图像打标签,避免了筛选素材存在的人为导向,识别盲区等问题;同时语意识别器

一种垃圾分类智能学习系统和方法.pdf
一种垃圾分类智能学习系统和方法,该系统包括处理器、触摸屏和二维码扫描装置,其中,处理器用于:控制触摸屏显示第一二维码,以进行注册或登录;控制触摸屏显示第二二维码,以购买垃圾袋;接收用户选择的垃圾袋对应的垃圾类型;控制触摸屏显示垃圾图例,接收用户将垃圾图例拖动至垃圾袋的操作;控制触摸屏在垃圾袋上显示第三二维码,以绑定垃圾袋;控制触摸屏显示多个分类垃圾箱,并接收用户的选择指令;控制用户端显示垃圾袋,通过二维码扫描装置扫描垃圾袋上的二维码,以开启分类垃圾箱;接收用户将垃圾袋拖动到垃圾箱的操作,以完成垃圾投放;根