
臂架位置确定方法、装置、设备及作业机械.pdf

朋兴****en

1/10
2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
臂架位置确定方法、装置、设备及作业机械.pdf
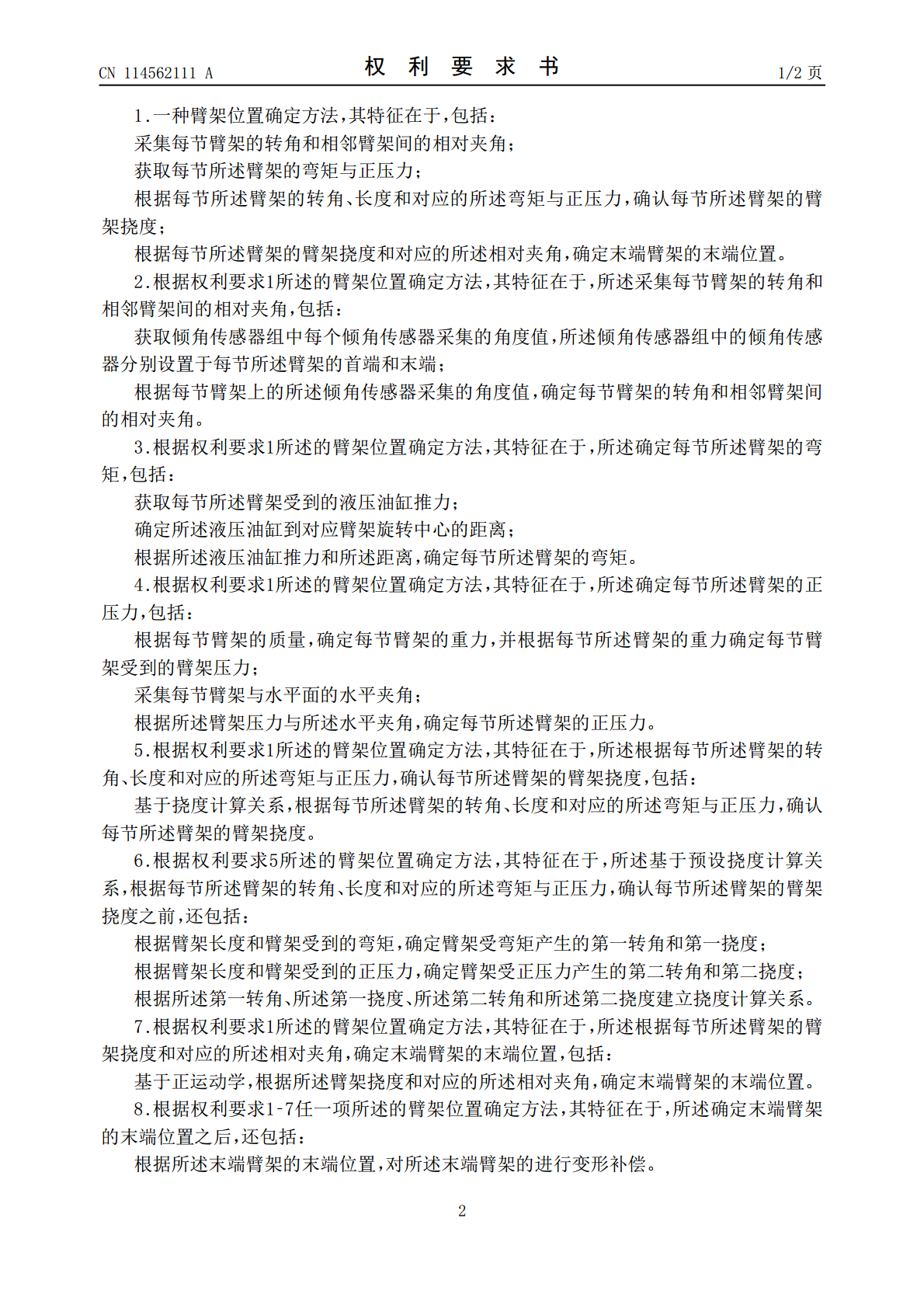
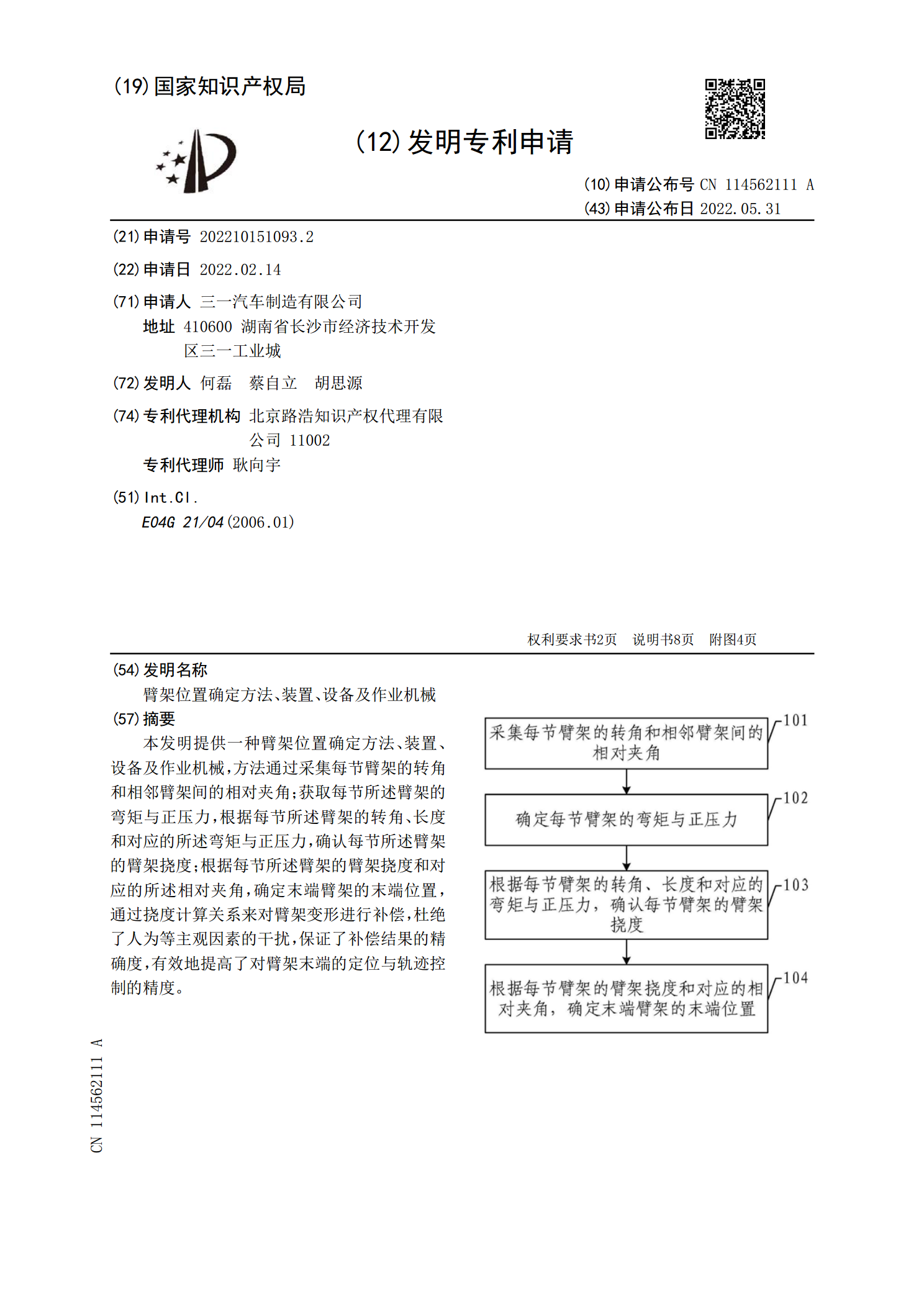
本发明提供一种臂架位置确定方法、装置、设备及作业机械,方法通过采集每节臂架的转角和相邻臂架间的相对夹角;获取每节所述臂架的弯矩与正压力,根据每节所述臂架的转角、长度和对应的所述弯矩与正压力,确认每节所述臂架的臂架挠度;根据每节所述臂架的臂架挠度和对应的所述相对夹角,确定末端臂架的末端位置,通过挠度计算关系来对臂架变形进行补偿,杜绝了人为等主观因素的干扰,保证了补偿结果的精确度,有效地提高了对臂架末端的定位与轨迹控制的精度。
机械臂控制方法、装置及作业机械.pdf
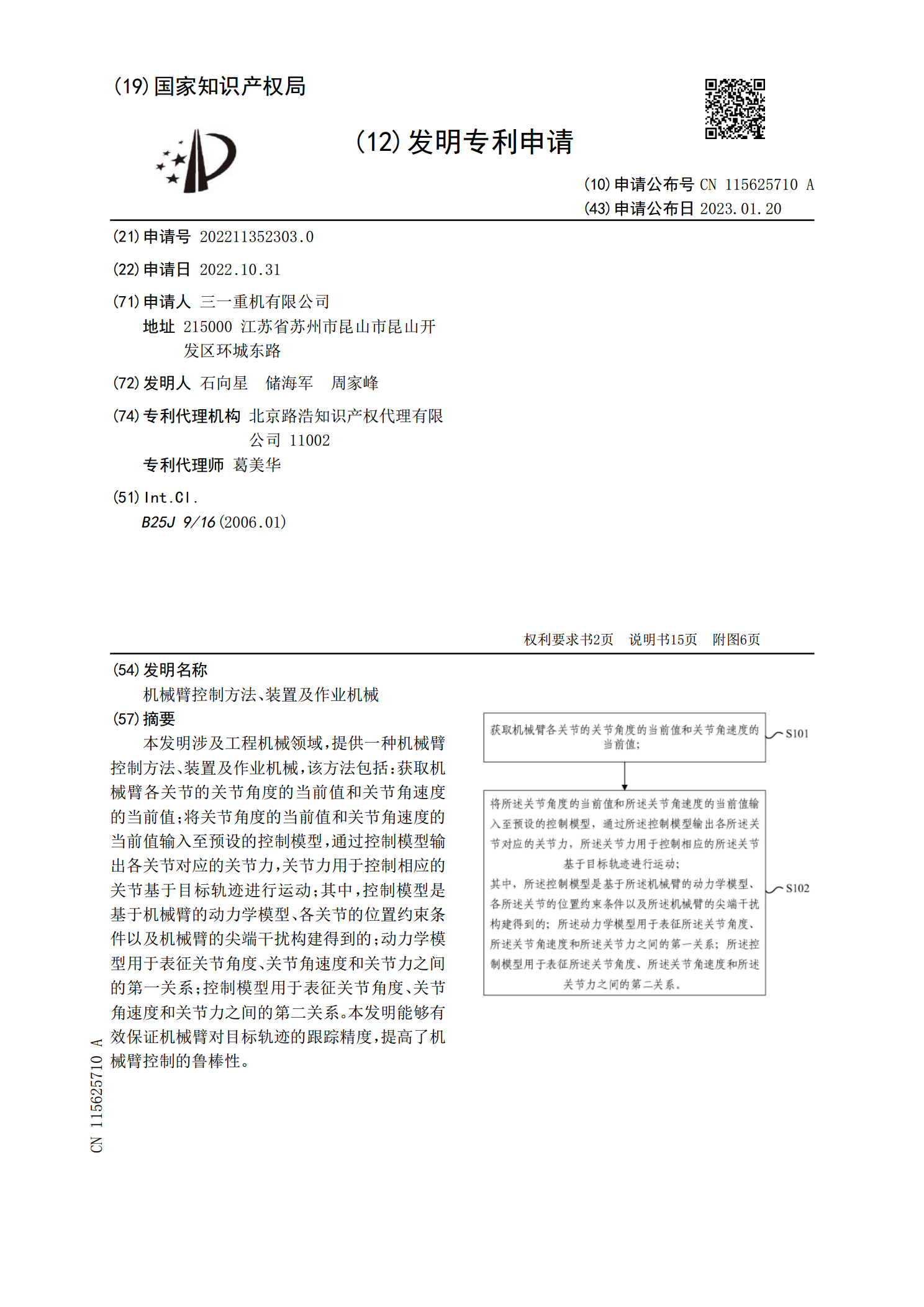
本发明涉及工程机械领域,提供一种机械臂控制方法、装置及作业机械,该方法包括:获取机械臂各关节的关节角度的当前值和关节角速度的当前值;将关节角度的当前值和关节角速度的当前值输入至预设的控制模型,通过控制模型输出各关节对应的关节力,关节力用于控制相应的关节基于目标轨迹进行运动;其中,控制模型是基于机械臂的动力学模型、各关节的位置约束条件以及机械臂的尖端干扰构建得到的;动力学模型用于表征关节角度、关节角速度和关节力之间的第一关系;控制模型用于表征关节角度、关节角速度和关节力之间的第二关系。本发明能够有效保证机械

臂架装置及作业车辆.pdf
本发明涉及工程机械技术领域,具体涉及一种臂架装置及作业车辆,臂架装置包括第一臂架、第二臂架,第一臂架的一端与第二臂架的一端铰接,在臂架装置的折叠状态,第一臂架与第二臂架上下层叠设置,第一臂架上与第二臂架铰接的一端设有弯折臂段,弯折臂段向远离第二臂架的方向弯折。能够使第一臂架在与第二臂架铰接的一端的箱体截面做高,从而提升第一臂架的刚性和抗扭性,同时由于第一臂架的弯折臂段向远离第二臂架的方向弯折,也给第二臂架与第一臂架铰接的一端留有空间,可使第二臂架箱体截面做高,进而使得第二臂架的刚性和抗扭性得到明显提升。

臂架液压系统的故障诊断方法、装置及作业机械.pdf
本发明提供一种臂架液压系统的故障诊断方法、装置及作业机械,所述臂架液压系统包括多节臂架,所述方法包括:获取每一节臂架的倾角数据;基于所述臂架的倾角数据,从所述多节臂架中确定目标臂架;在未接收到所述目标臂架的控制信号的情况下,确定所述臂架液压系统发生故障。该方法通过获取臂架的倾角数据和控制信号,实现臂架液压系统的故障诊断,克服了现有技术无法实现臂架液压系统故障诊断的缺陷,无需增设其他传感器,有效降低了故障诊断的检测成本。

确定设备位置的方法和装置.pdf
本申请提供了一种确定设备位置的方法和装置,该方法包括:第一设备向第二设备发送第一指示信息,所述第一指示信息用于指示所述第二设备发送第一音频信号;所述第一设备检测所述第一音频信号;所述第一设备根据所述第一音频信号的检测结果确定所述第一设备与所述第二设备的位置关系。第一音频信号的具体形式可以由第一设备确定后通知第二设备,或者第一音频信号的具体形式可以由第二设备确定后通知第一设备。无论哪种情况,作为检测设备的第一设备均可以更加准确地从环境噪音中确定待检测的音频信号,并且采取针对性的检测措施进行检测,相比于第一设