
用于回声消除的滤波器自适应步长控制.pdf

猫巷****雪凝

1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于回声消除的滤波器自适应步长控制.pdf
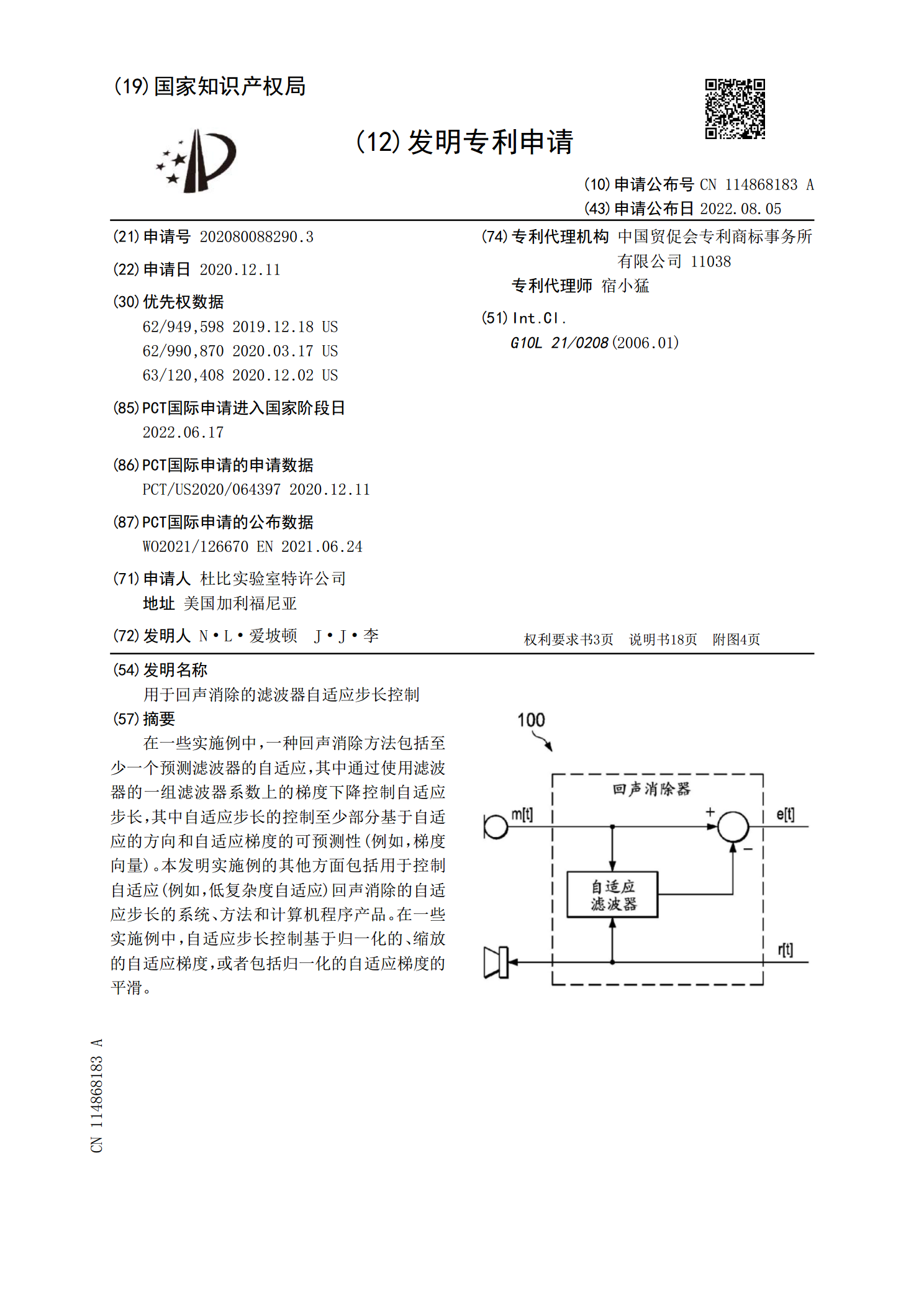
在一些实施例中,一种回声消除方法包括至少一个预测滤波器的自适应,其中通过使用滤波器的一组滤波器系数上的梯度下降控制自适应步长,其中自适应步长的控制至少部分基于自适应的方向和自适应梯度的可预测性(例如,梯度向量)。本发明实施例的其他方面包括用于控制自适应(例如,低复杂度自适应)回声消除的自适应步长的系统、方法和计算机程序产品。在一些实施例中,自适应步长控制基于归一化的、缩放的自适应梯度,或者包括归一化的自适应梯度的平滑。

lms算法自适应滤波器应用于自适应回声消除matlab基本步骤.pdf
lms算法自适应滤波器应用于自适应回声消除matlab基本步骤1.引言1.1概述LMS算法自适应滤波器应用于自适应回声消除是一种有效的信号处理技术。在通信系统、音频处理等领域,回声是一个常见的问题,它会导致信号质量下降和通信效果的恶化。为了解决这个问题,自适应滤波器和LMS算法被广泛采用。本文旨在介绍LMS算法自适应滤波器在自适应回声消除中的应用,并详细讲解其基本步骤。首先,我们将对LMS算法和自适应滤波器进行介绍,包括其原理和基本概念。然后,我们将探讨自适应回声消除的原理,并介绍LMS算法在回声消除中的

变步长和变正则化因子的自适应回声消除算法.docx
变步长和变正则化因子的自适应回声消除算法自适应回声消除是一种用于在语音通信和音频处理中去除回声的算法。回声通常是由于音频信号在录音期间通过扬声器播放后又被麦克风捕捉到而产生的。这导致了混叠效应,降低了音频质量和清晰度。为了解决这个问题,许多自适应回声消除算法已经提出。其中一种方法是变步长和变正则化因子的自适应回声消除算法。该算法利用自适应滤波器来估计回声路径,并减少回声对于原始信号的干扰。本论文将对此算法进行研究和分析,并讨论其在实际应用中的优势和局限性。变步长和变正则化因子的自适应回声消除算法的核心思想

基于自适应滤波器的回声消除算法研究及应用.docx
基于自适应滤波器的回声消除算法研究及应用基于自适应滤波器的回声消除算法研究及应用摘要:回声是由于声音在传播过程中被反射而产生的冗余声音,会严重降低语音通信的质量和可理解性。为了解决这一问题,本文研究并应用了基于自适应滤波器的回声消除算法。首先介绍了回声的形成原理和常见的回声消除方法,并分析了它们的优缺点。然后,详细介绍了自适应滤波器的原理和算法,并讨论了其在回声消除中的应用。最后,通过实验验证了自适应滤波器在回声消除中的有效性和可行性。关键词:回声消除、自适应滤波器、语音通信、质量、可理解性1.引言回声是

变步长和变正则化因子的自适应回声消除算法的任务书.docx
变步长和变正则化因子的自适应回声消除算法的任务书背景在医学超声图像处理中,回声是声波在组织内部反射后产生的信号,而回声消除则是对这些信号进行降噪和增强来更好地展示超声图像。目前,存在一些回声消除算法,但是常规的回声消除算法会受到超声图像的噪声干扰和影响,较难消除全部回声。因此,人们需要设计新的自适应回声消除算法来更好地解决这个问题。任务本次任务的主要目标是设计并实现一个基于变步长和变正则化因子的自适应回声消除算法,可以在超声图像中消除尽可能多的回声,最后可以通过评估算法质量的指标来验证算法是否有效。具体包