
激光点云自动化地面提取方法.pdf

音景****ka


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

激光点云自动化地面提取方法.pdf
本发明提供了一种激光点云自动化地面提取方法,包括:输入激光点云地图包中的单帧点云,对所述单帧点云进行盒子滤波,确定感兴趣区并提取得到单帧感兴趣区点云,然后判断所述单帧感兴趣区点云的累计帧数是否不小于第一阈值;将提取的所有单帧感兴趣区点云进行叠加,得到叠加感兴趣区点云,然后采用区域生长法对所述叠加感兴趣区点云进行噪点去除,得到目标感兴趣区点云;计算所述目标感兴趣区点云的地面起伏程度;针对目标点云地图,根据所述地面起伏程度,利用布料滤波完成地面提取。本发明提高CSF提取地面的自动化程度;杜绝除了道路上一些车辆

地面激光点云的建筑区域快速提取方法.docx
地面激光点云的建筑区域快速提取方法地面激光点云的建筑区域快速提取方法摘要:随着激光点云技术的发展,建筑区域的快速提取成为地面激光点云处理中的重要任务之一。本文综述了当前常用的地面激光点云建筑区域提取方法,并提出了一种基于xxx的新方法。实验结果表明,该方法在准确性和效率方面都有显著的改进。引言:地面激光点云的建筑区域提取在城市规划、三维建筑信息提取、环境监测等领域具有广泛的应用。然而,由于地面激光点云中存在大量的噪声、遮挡和杂乱点,使得建筑区域的提取成为一个具有挑战性的任务。因此,开展地面激光点云建筑区域

基于地面激光雷达点云数据的树木胸径及树干形态提取方法研究.docx
基于地面激光雷达点云数据的树木胸径及树干形态提取方法研究摘要:随着激光雷达技术的发展,其在三维数据获取和处理领域中的应用越来越广泛。本论文研究了一种基于地面激光雷达点云数据的树木胸径及树干形态提取方法。通过分析地面激光雷达点云数据,结合相关算法和模型,实现了对树木胸径及树干形态的自动提取。实验结果表明,该方法能够准确地提取树木胸径及树干形态,并具有较高的精度和效率。关键词:激光雷达,点云数据,树木胸径,树干形态,提取方法1.引言激光雷达技术可以通过发射激光束并测量返回的反射信号,获取目标物体的三维坐标信息

基于Mesh的地面激光点云分离方法研究.docx
基于Mesh的地面激光点云分离方法研究摘要地面激光点云分离是激光点云处理中的重要任务之一,该任务的主要目的是从激光点云数据中分离出地面点云以及非地面点云。本论文针对基于Mesh的地面激光点云分离方法进行了深入的研究与探索。首先,介绍了地面激光点云分离的背景与意义,以及目前常用的地面激光点云分离方法。然后,详细介绍了基于Mesh的地面激光点云分离方法的原理与流程,并列举了其优势与不足之处。最后,通过实验验证了基于Mesh的地面激光点云分离方法的有效性与实用性,并总结了研究结果与展望了未来的研究方向。1.引言
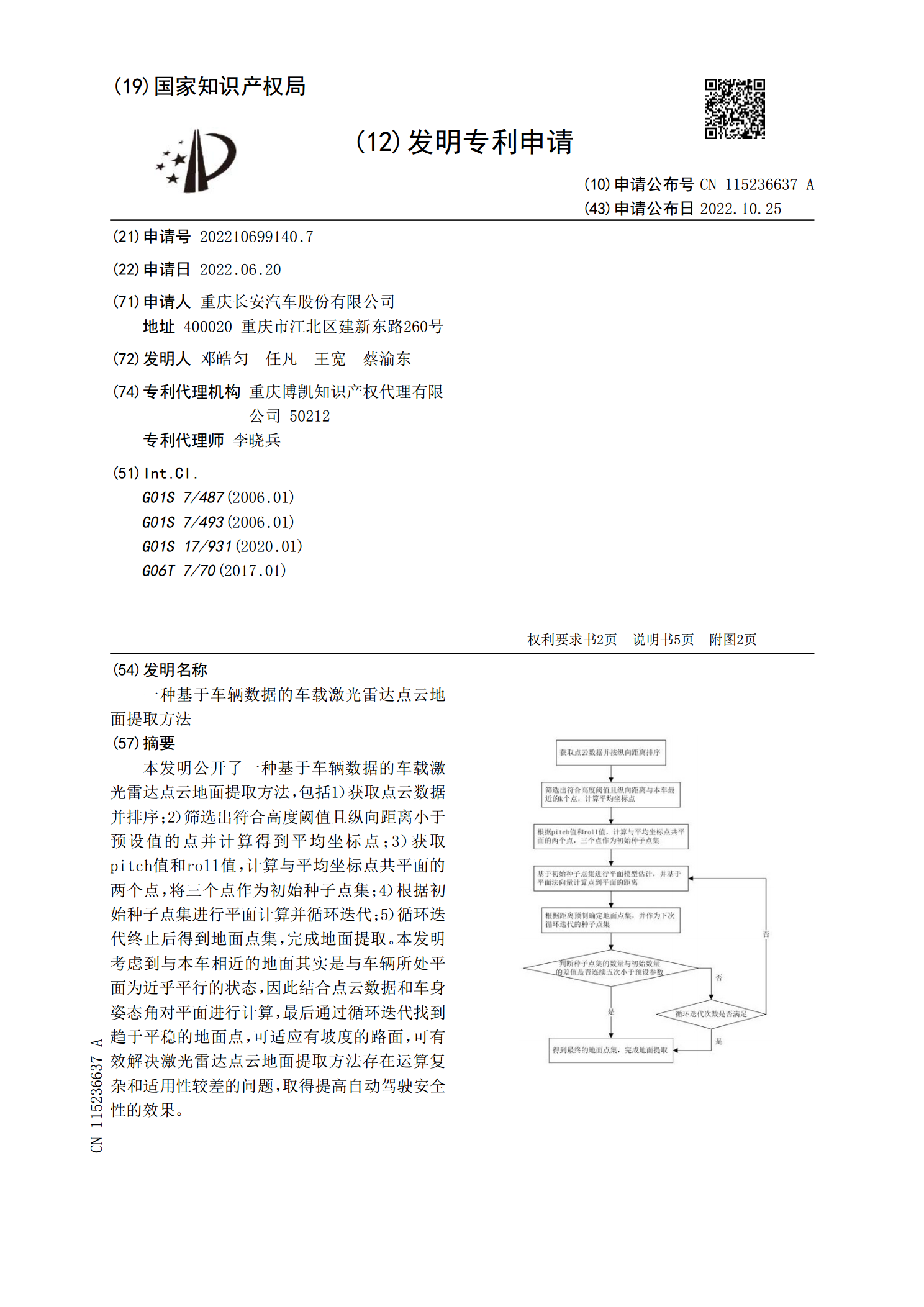
一种基于车辆数据的车载激光雷达点云地面提取方法.pdf
本发明公开了一种基于车辆数据的车载激光雷达点云地面提取方法,包括1)获取点云数据并排序;2)筛选出符合高度阈值且纵向距离小于预设值的点并计算得到平均坐标点;3)获取pitch值和roll值,计算与平均坐标点共平面的两个点,将三个点作为初始种子点集;4)根据初始种子点集进行平面计算并循环迭代;5)循环迭代终止后得到地面点集,完成地面提取。本发明考虑到与本车相近的地面其实是与车辆所处平面为近乎平行的状态,因此结合点云数据和车身姿态角对平面进行计算,最后通过循环迭代找到趋于平稳的地面点,可适应有坡度的路面,可有