
点云探测系统的信号处理方法和点云探测系统.pdf

一只****ua


1/1
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
点云探测系统的信号处理方法和点云探测系统.pdf
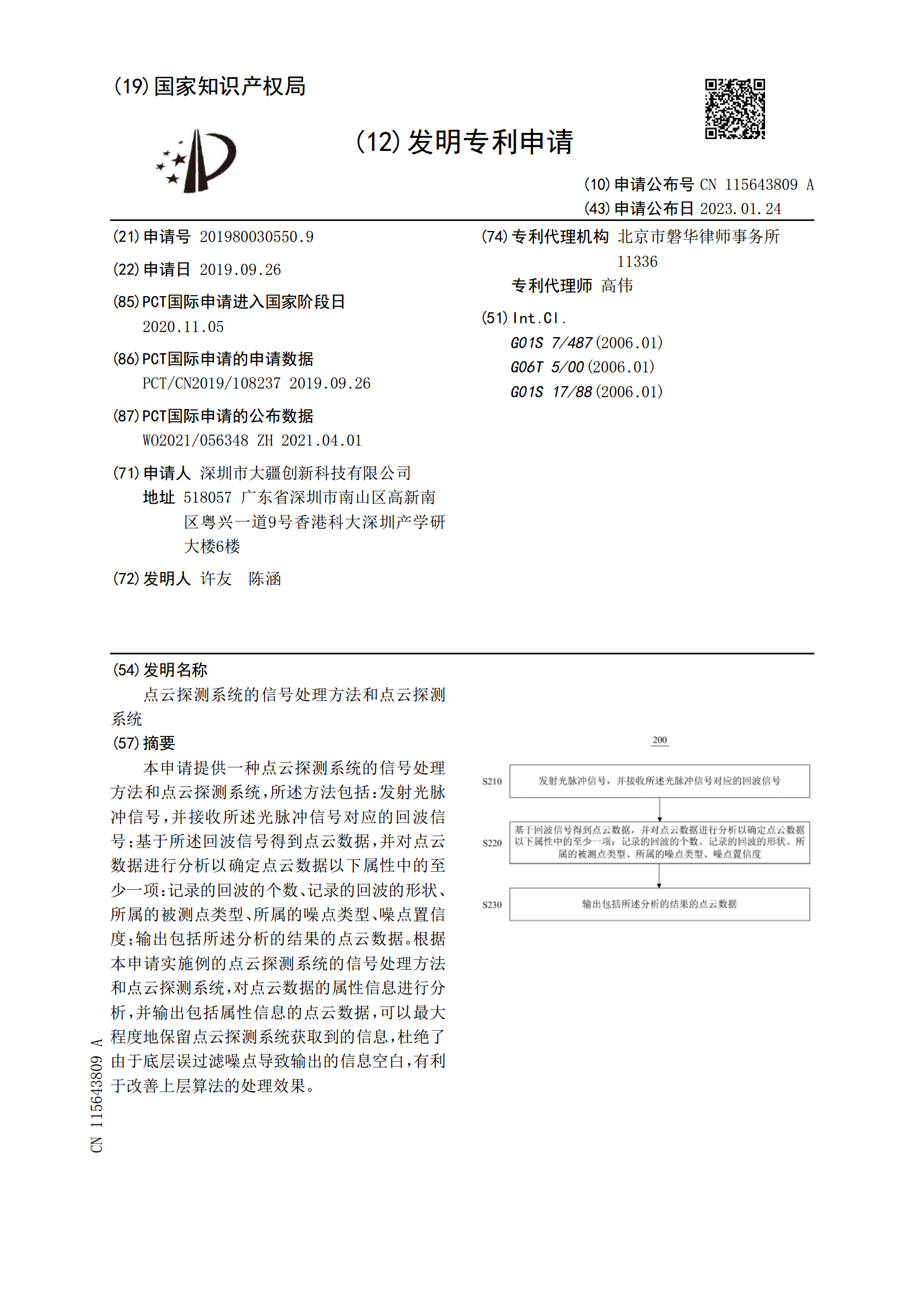
本申请提供一种点云探测系统的信号处理方法和点云探测系统,所述方法包括:发射光脉冲信号,并接收所述光脉冲信号对应的回波信号;基于所述回波信号得到点云数据,并对点云数据进行分析以确定点云数据以下属性中的至少一项:记录的回波的个数、记录的回波的形状、所属的被测点类型、所属的噪点类型、噪点置信度;输出包括所述分析的结果的点云数据。根据本申请实施例的点云探测系统的信号处理方法和点云探测系统,对点云数据的属性信息进行分析,并输出包括属性信息的点云数据,可以最大程度地保留点云探测系统获取到的信息,杜绝了由于底层误过滤噪

一种点云融合方法、装置及探测系统.pdf
一种点云融合方法、装置及探测系统。所述方法包括:获取第一目标点,确定与所述第一目标点相似的第二目标点,根据所述第二目标点的相似点分布,确定所述第二目标点的目标区域,当所述目标区域与所述第一目标点满足预设位置关系时,将所述第一目标点和所述第二目标点进行融合。在点云融合时,根据第二目标点的周围相似点分布情况为第二目标点确定一个目标区域,根据第一目标点和目标区域的位置关系确定第一目标点是否可以融合第二目标点,综合考虑了第二目标点周围的分布情况,很好地保留了三维场景的细节。
信号处理方法、装置和液面探测系统.pdf
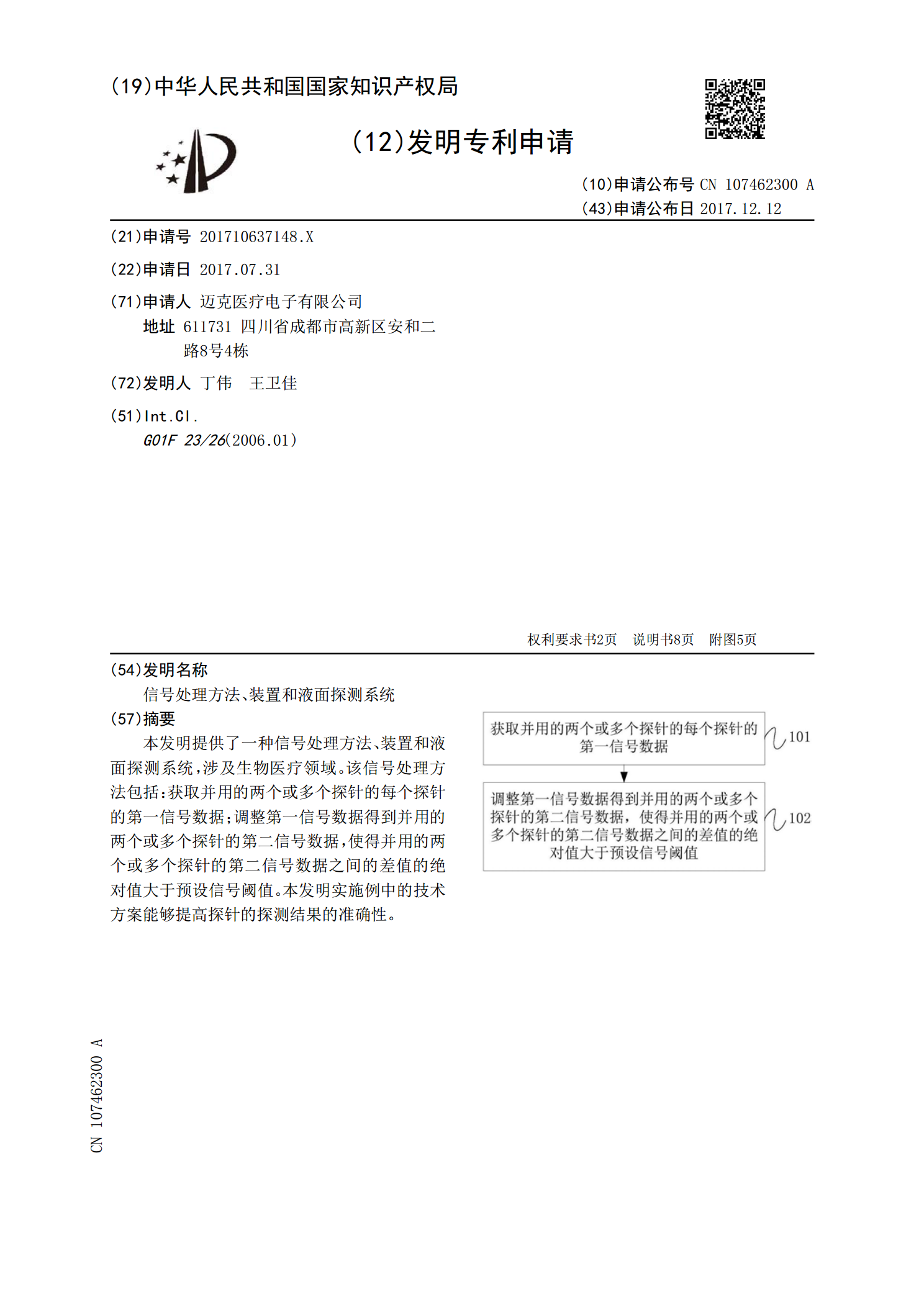
本发明提供了一种信号处理方法、装置和液面探测系统,涉及生物医疗领域。该信号处理方法包括:获取并用的两个或多个探针的每个探针的第一信号数据;调整第一信号数据得到并用的两个或多个探针的第二信号数据,使得并用的两个或多个探针的第二信号数据之间的差值的绝对值大于预设信号阈值。本发明实施例中的技术方案能够提高探针的探测结果的准确性。

云水资源探测系统及方法.pdf
本发明实施例提供一种云水资源探测系统及方法。所述系统包括计算设备及与计算设备通信连接的拉曼激光雷达、微波辐射计、毫米波云雷达、风廓线雷达、多普勒测风激光雷达。拉曼激光雷达及微波辐射计用于获得云系温湿度数据。毫米波云雷达及微波辐射计用于获得云水含量廓线。风廓线雷达用于获得云系水平风速。多普勒测风激光雷达用于获得云底的垂直运动速度。计算设备用于根据云系温湿度数据、云水含量廓线、云系水平风速及云底的垂直运动速度计算得到总云水量,实现云水资源探测。所述系统能够融合多源观测数据,获得总云水量,分析区域云水资源的分布
一种点云数据的处理方法及装置和点云渲染方法及装置.pdf
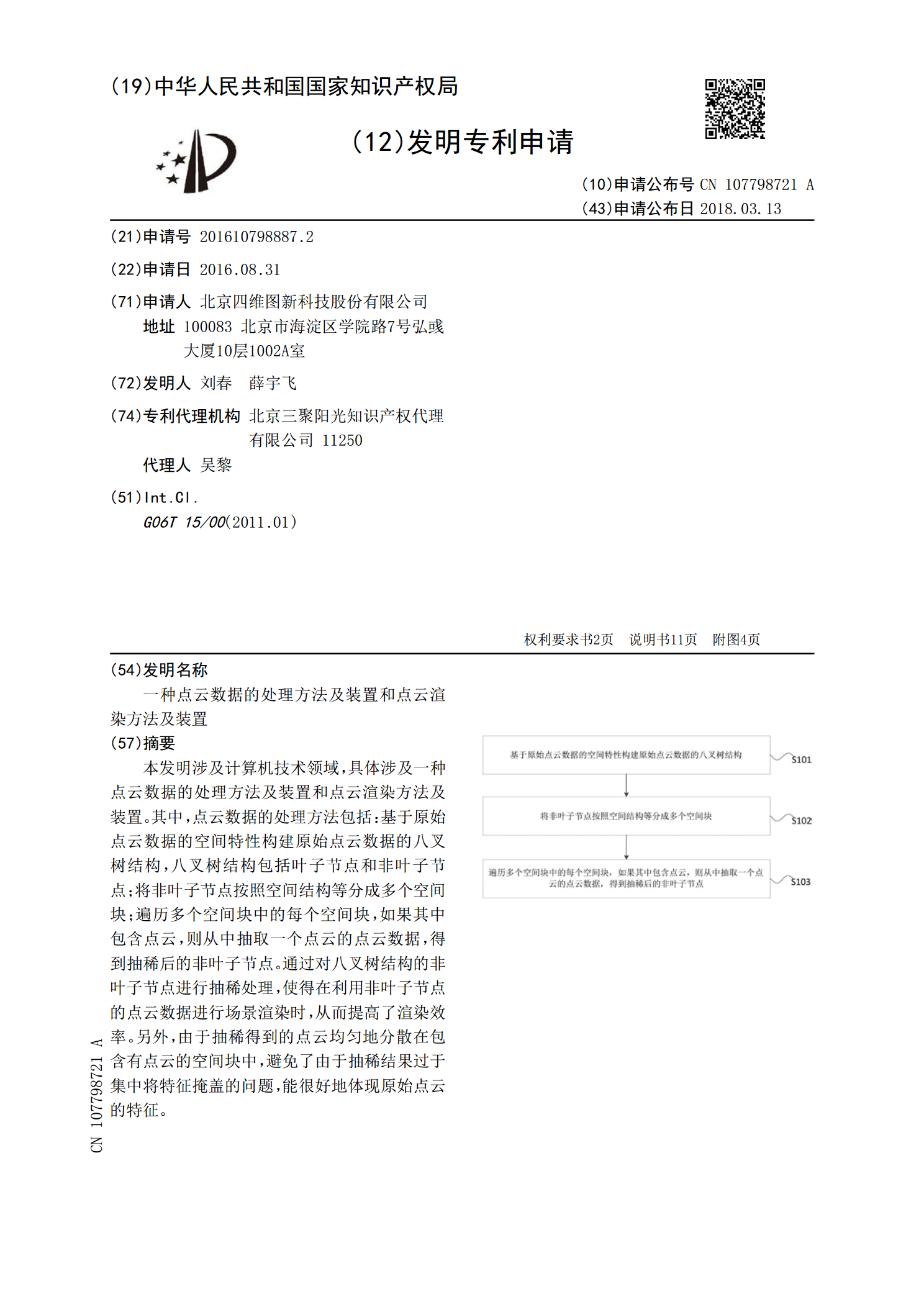
本发明涉及计算机技术领域,具体涉及一种点云数据的处理方法及装置和点云渲染方法及装置。其中,点云数据的处理方法包括:基于原始点云数据的空间特性构建原始点云数据的八叉树结构,八叉树结构包括叶子节点和非叶子节点;将非叶子节点按照空间结构等分成多个空间块;遍历多个空间块中的每个空间块,如果其中包含点云,则从中抽取一个点云的点云数据,得到抽稀后的非叶子节点。通过对八叉树结构的非叶子节点进行抽稀处理,使得在利用非叶子节点的点云数据进行场景渲染时,从而提高了渲染效率。另外,由于抽稀得到的点云均匀地分散在包含有点云的空间