
一种家用巡视智能机器人.pdf

Ja****20


1/7

2/7

3/7

4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种家用巡视智能机器人.pdf
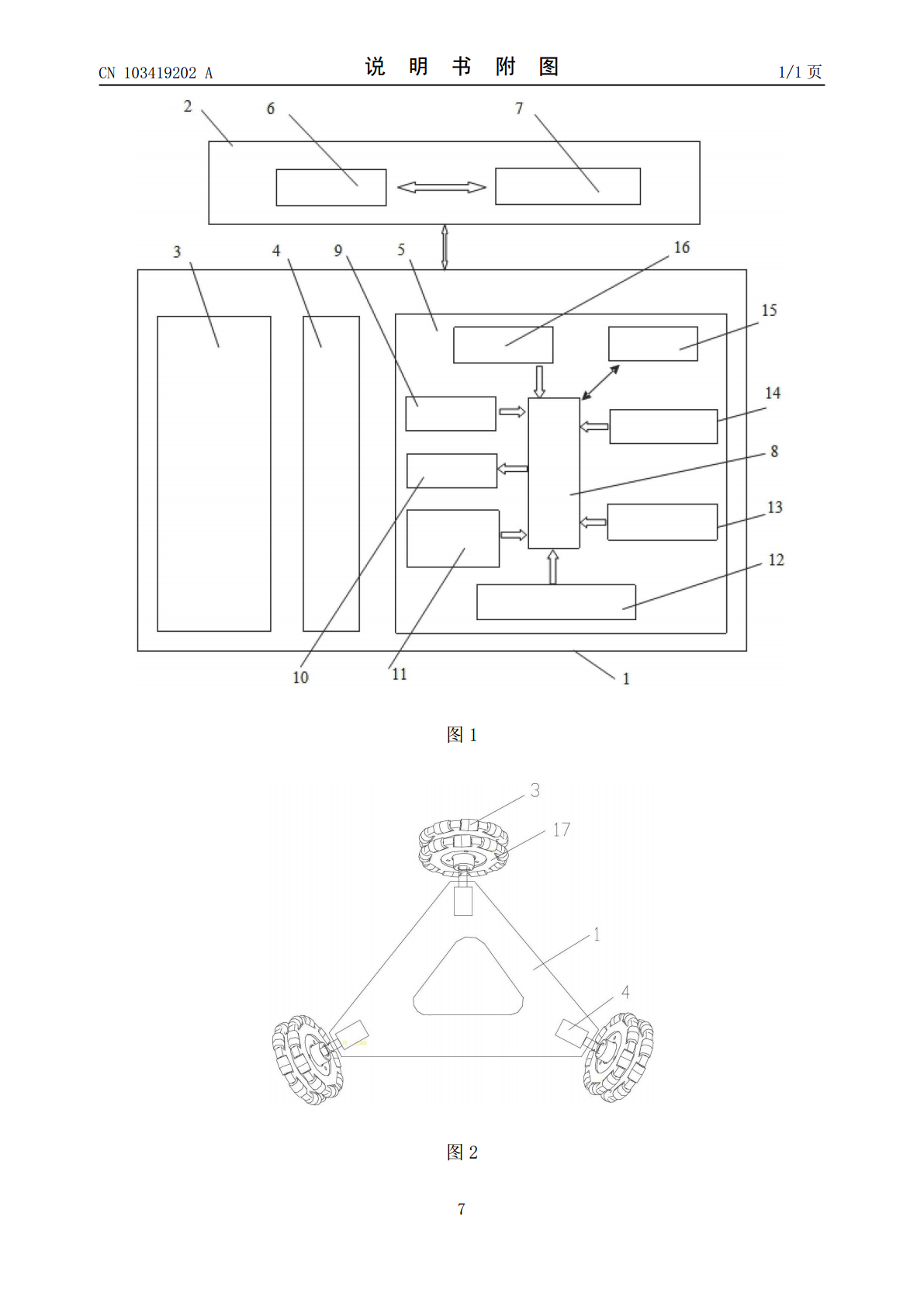
本发明涉及机器人技术领域,特别是指一种家用巡视智能机器人,包括移动底盘机构和上位机控制机构,所述上位机控制机构包括用于对整个机器人实施自动控制,对各种输入数据和信号进行分析处理的上位机和用于将用户命令发送给移动底盘机构的中央处理单元;所述移动底盘机构包括全向轮、动力机构和电气控制单元,所述电气控制单元,用于控制动力机构将电能转换为动能;动力机构,用于将电能转换为动能并控制全向轮运行;全向轮,用于带动移动底盘机构移动。

一种智能家用艾灸机器人.pdf
本发明公开了一种智能家用艾灸机器人,主要由底座、智能机械手臂、艾灸作业执行机构、艾灸辅助盒子给进机构、艾灸辅助盒子、控制器以及排烟系统构成,其中,底座用于整体支撑,艾灸作业执行机构与智能机械手臂连接,用于艾灸条的夹持、旋转等操作,艾灸辅助盒子给进机构与智能机械手臂和艾灸辅助盒子连接,在艾灸辅助盒子给进机构的驱动下,艾灸辅助盒子可实现位置的调整与艾灸作业执行机构配合,完成艾灸以及削灰等操作,通过控制器对智能机械手臂、距离传感器以及视觉传感器的信号采集,控制智能机械手臂与艾灸辅助盒子配合,以保持与传统手持灸工

一种家用垃圾收集智能机器人.pdf
本发明公开了一种家用垃圾收集智能机器人,其结构包括智能收集机器人、外壳、防撞条、入垃圾口、存仓、电机仓和收集装置,所述智能收集机器人的外部设有外壳,所述外壳的侧面设有防撞条,所述防撞条通过外壳与智能收集机器人固定连接,所述智能收集机器人的前方固定设有入垃圾口,所述入垃圾口的后方设有存仓,所述存仓的后方设有电机仓,所述电机仓的表面设有收集装置,本发明的一种家用垃圾收集智能机器人,可通过设置带有防撞条的外壳,增加了安全性,通过设置带有升降轴和旋轮的主轴杆,配合副轴杆,便于对收集装置进行各角度的调整,通过设置带

一种智能家用清扫机器人.pdf
本发明公开了一种智能家用清扫机器人,属于智能机器人领域;由左边刷机构1、右边刷机构7、滚刷机构2、底盘3、行走机构4、万向轮6、吸尘机构5和控制系统组成。控制系统包含主控系统、执行电机系统、传感器系统、液晶显示系统、电源系统和路径覆盖算法;通过控制系统控制实现机器人参数设置,机器人自我检测等功能,路径覆盖算法采用犁耕式清扫算法,大大提高了清扫机器人的清扫速度和清扫效率。与现有的家用清扫机器人相比,本发明设计的清扫机器人的机械结构更简单、更容易实现。

《家用智能机器人》.ppt
.................................................................................