
一种基于工业机器人的物体姿态调整装置及姿态调整方法.pdf

是雁****找我

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于工业机器人的物体姿态调整装置及姿态调整方法.pdf
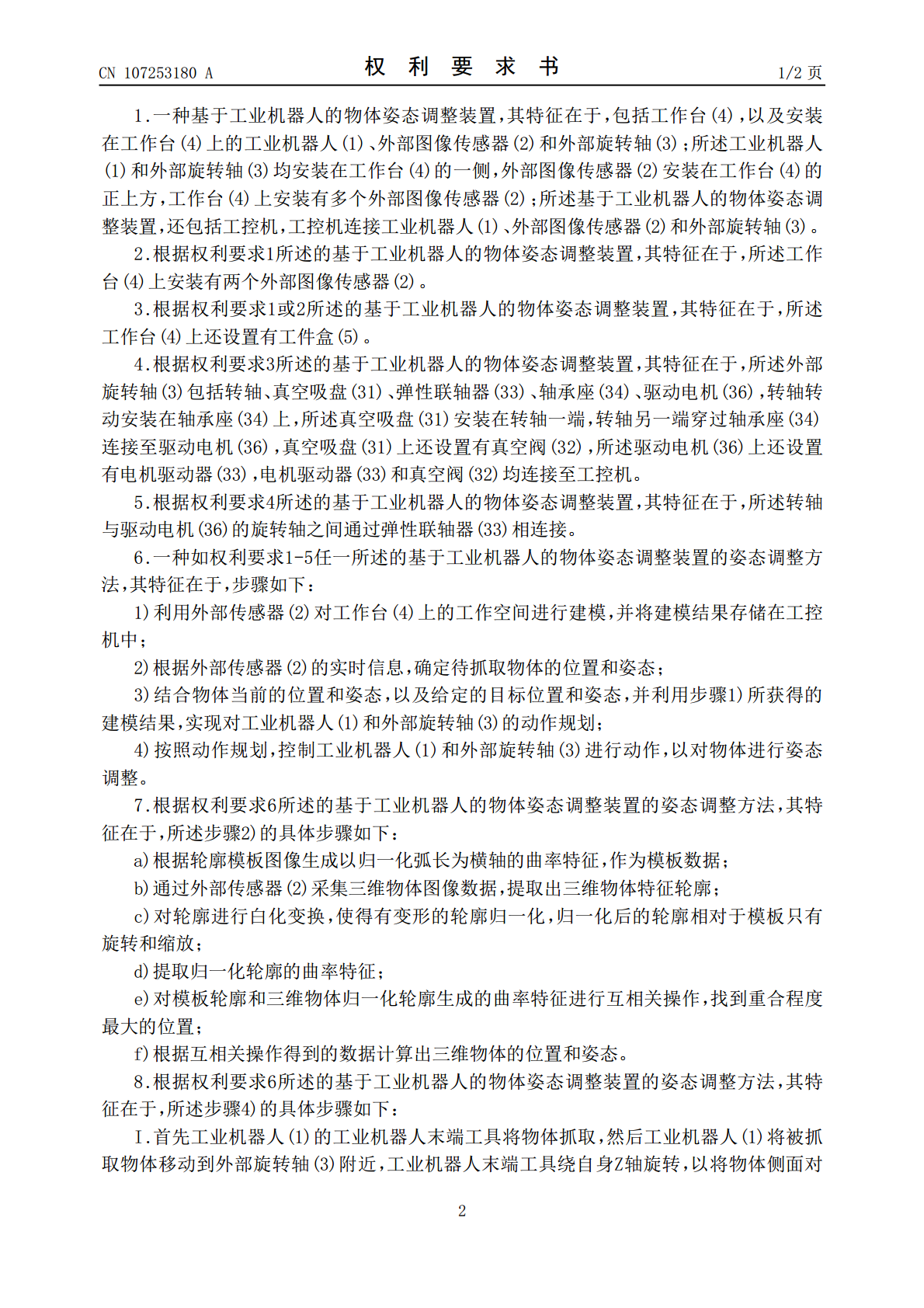
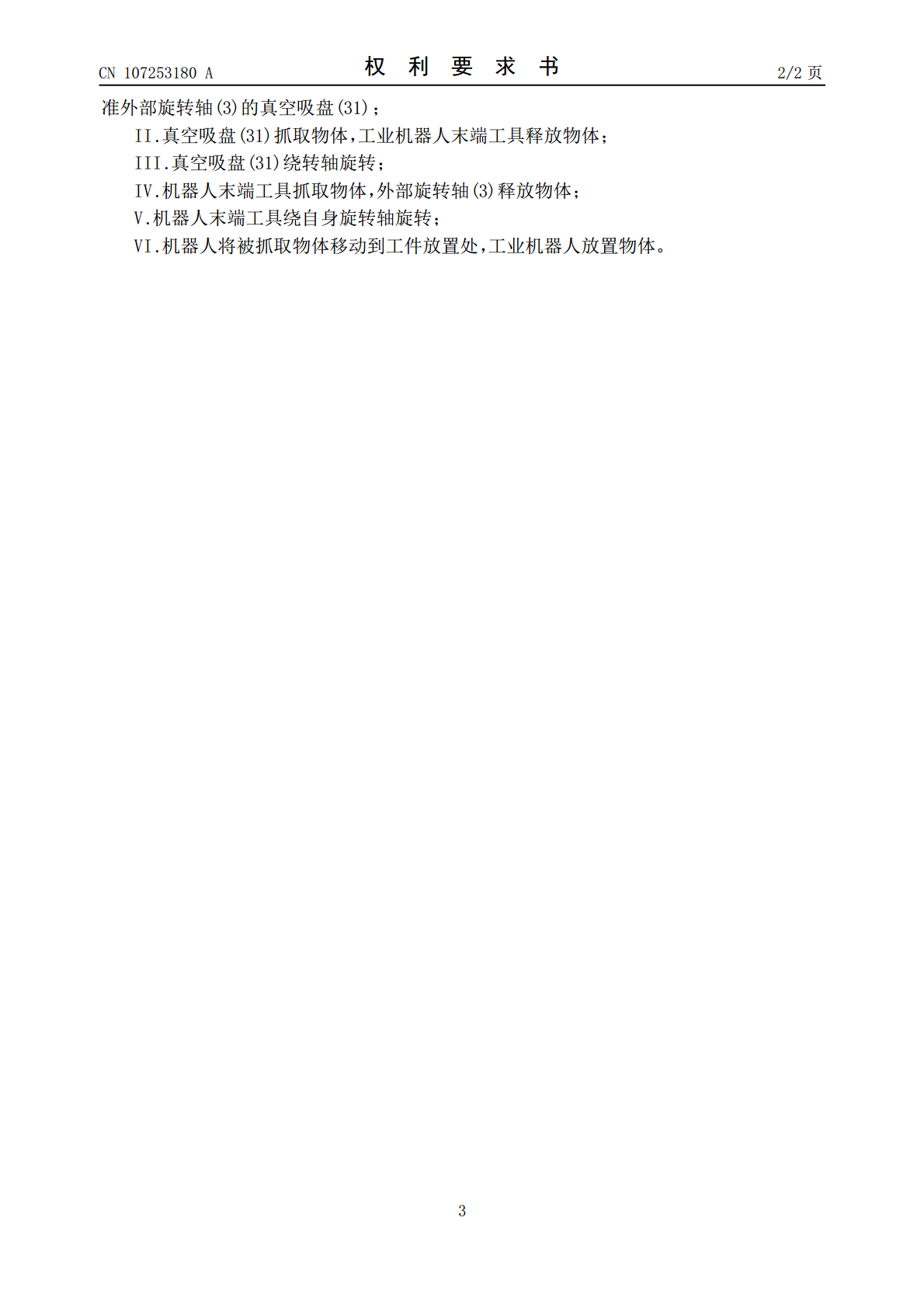
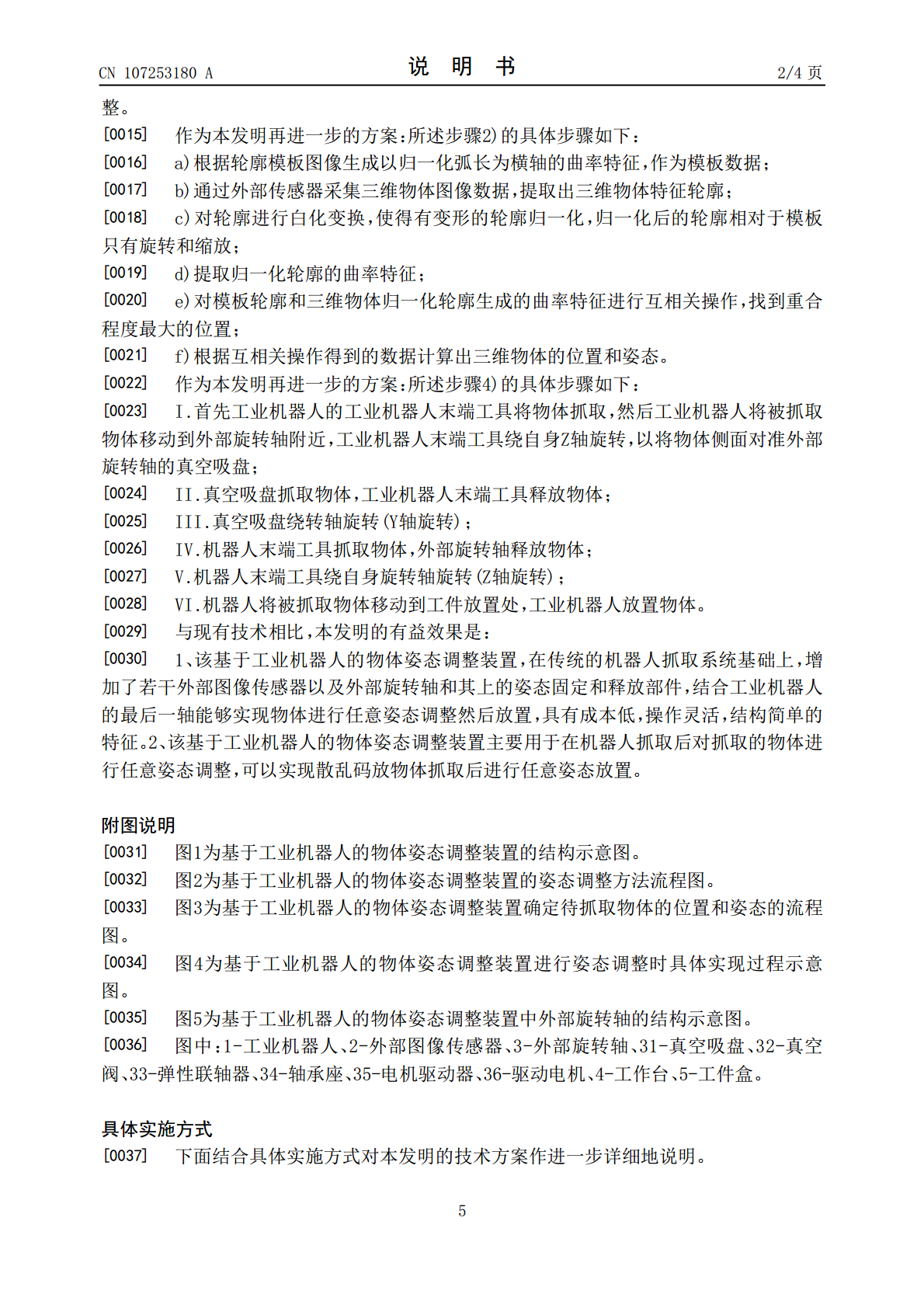
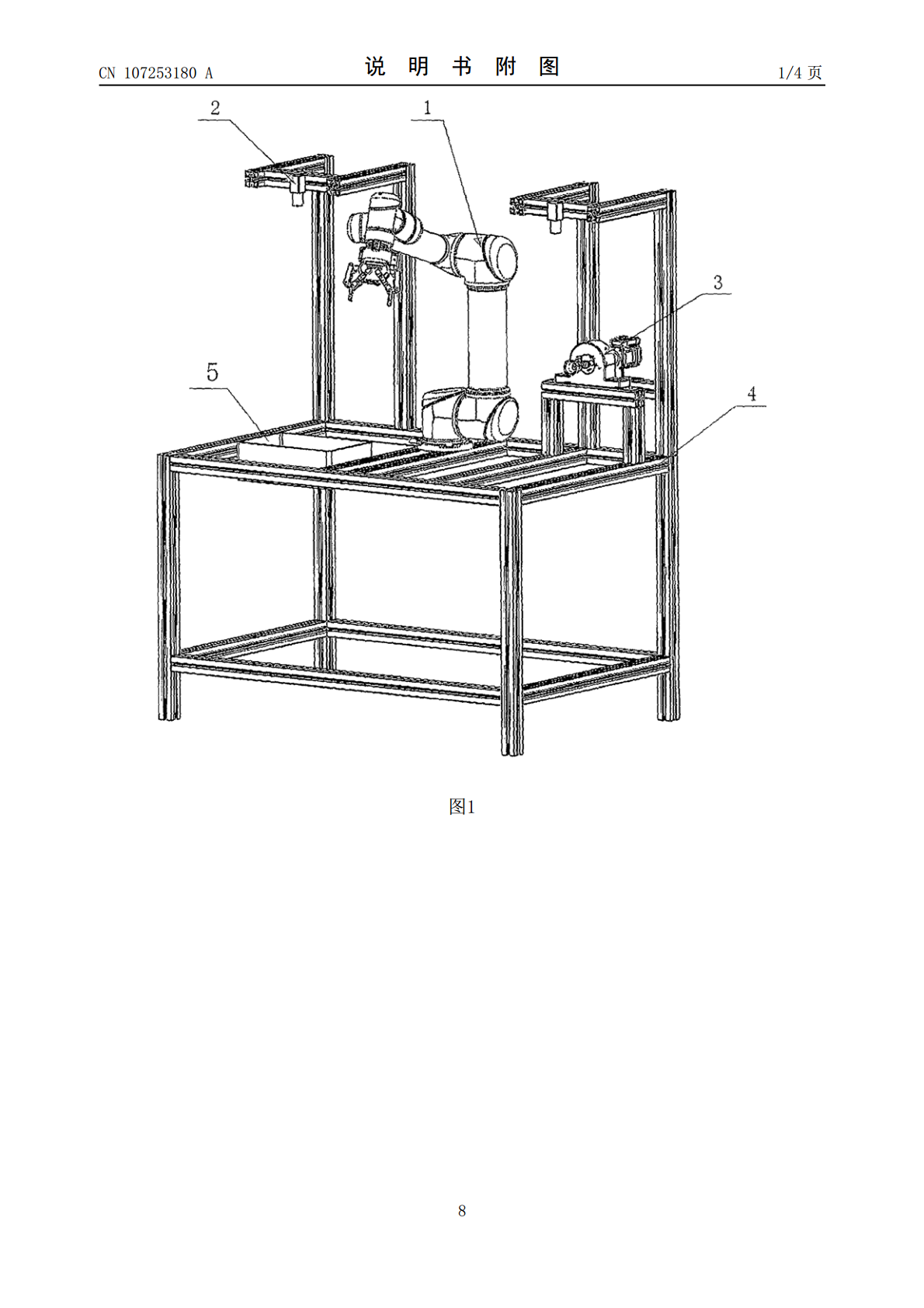
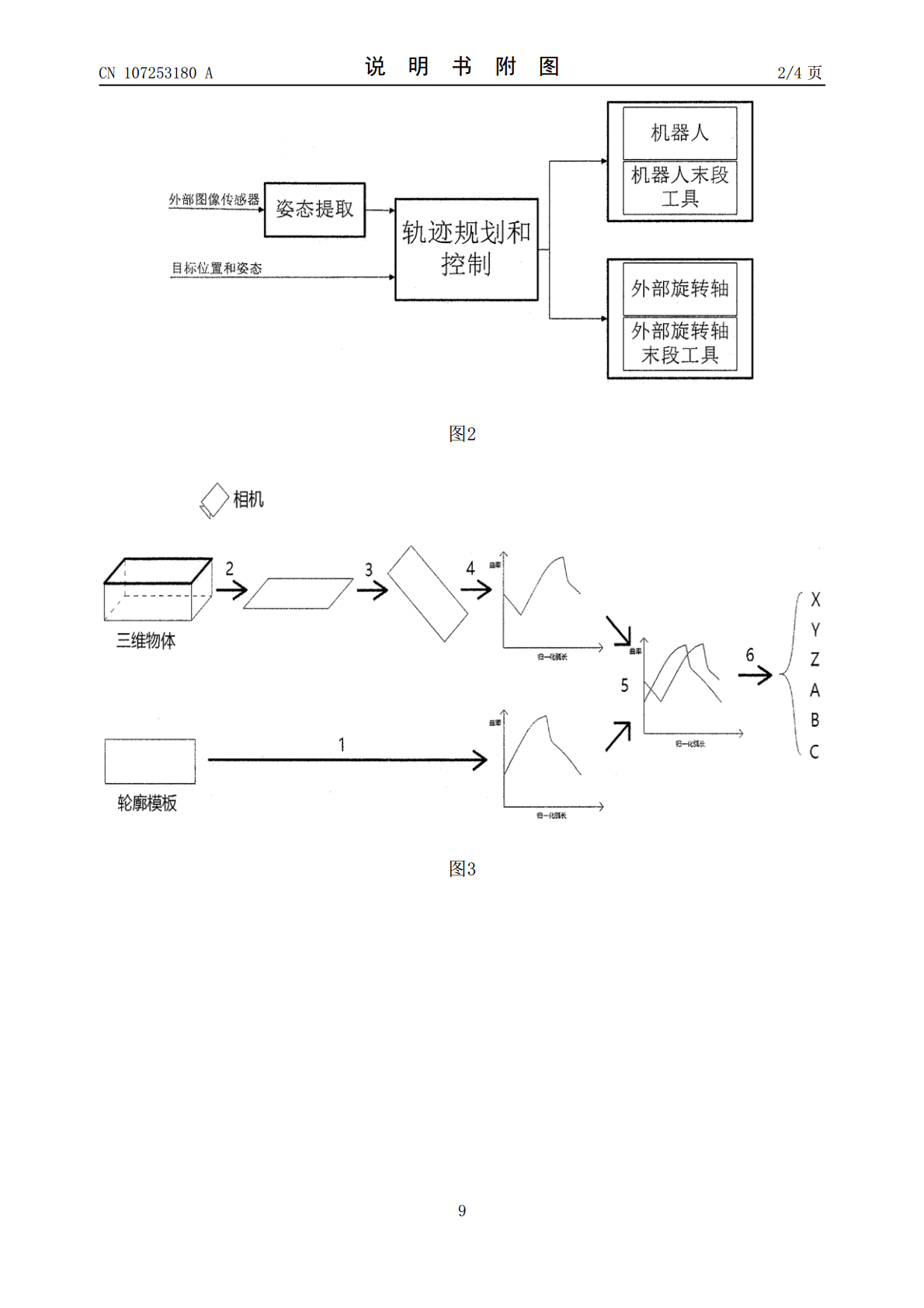
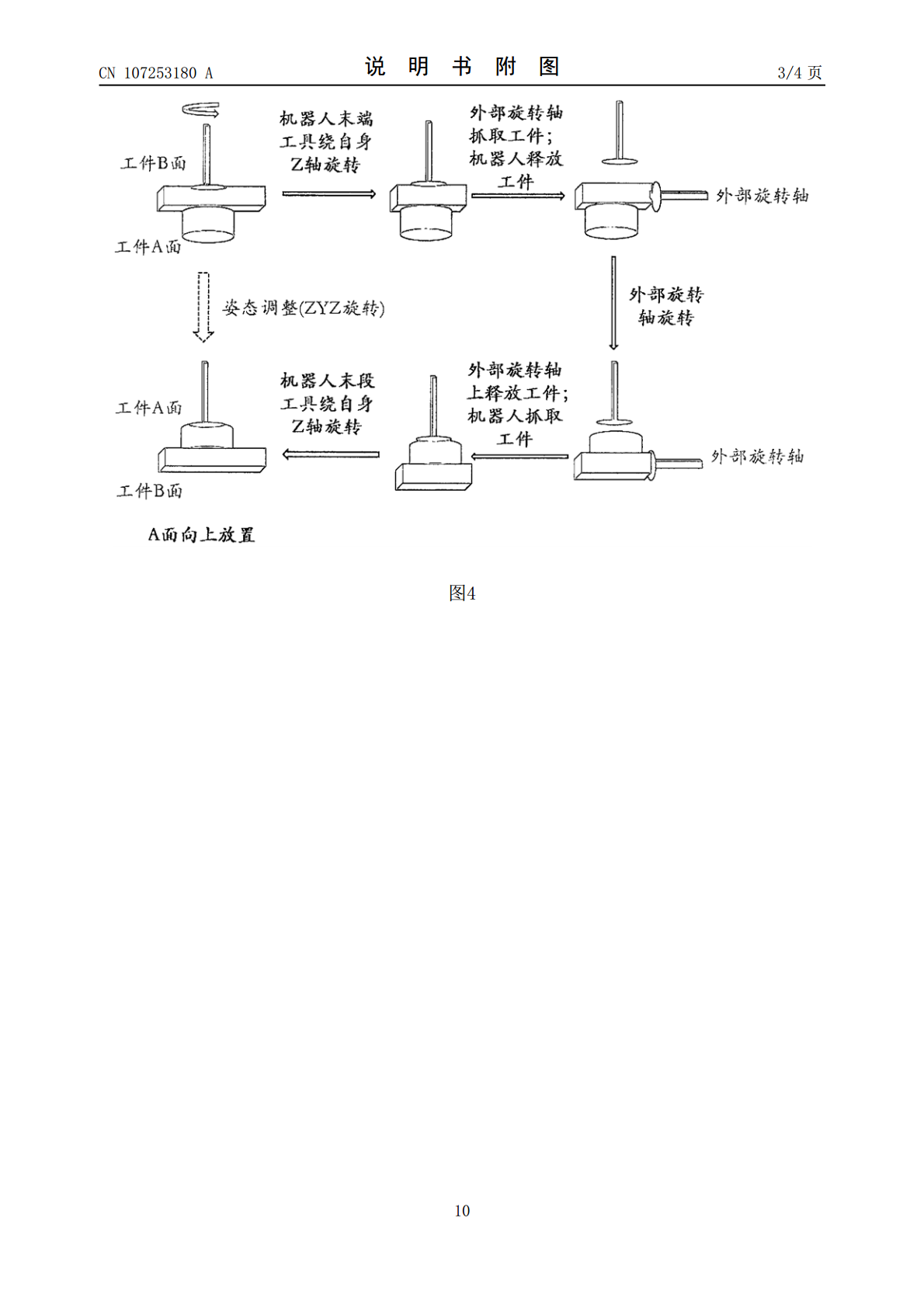
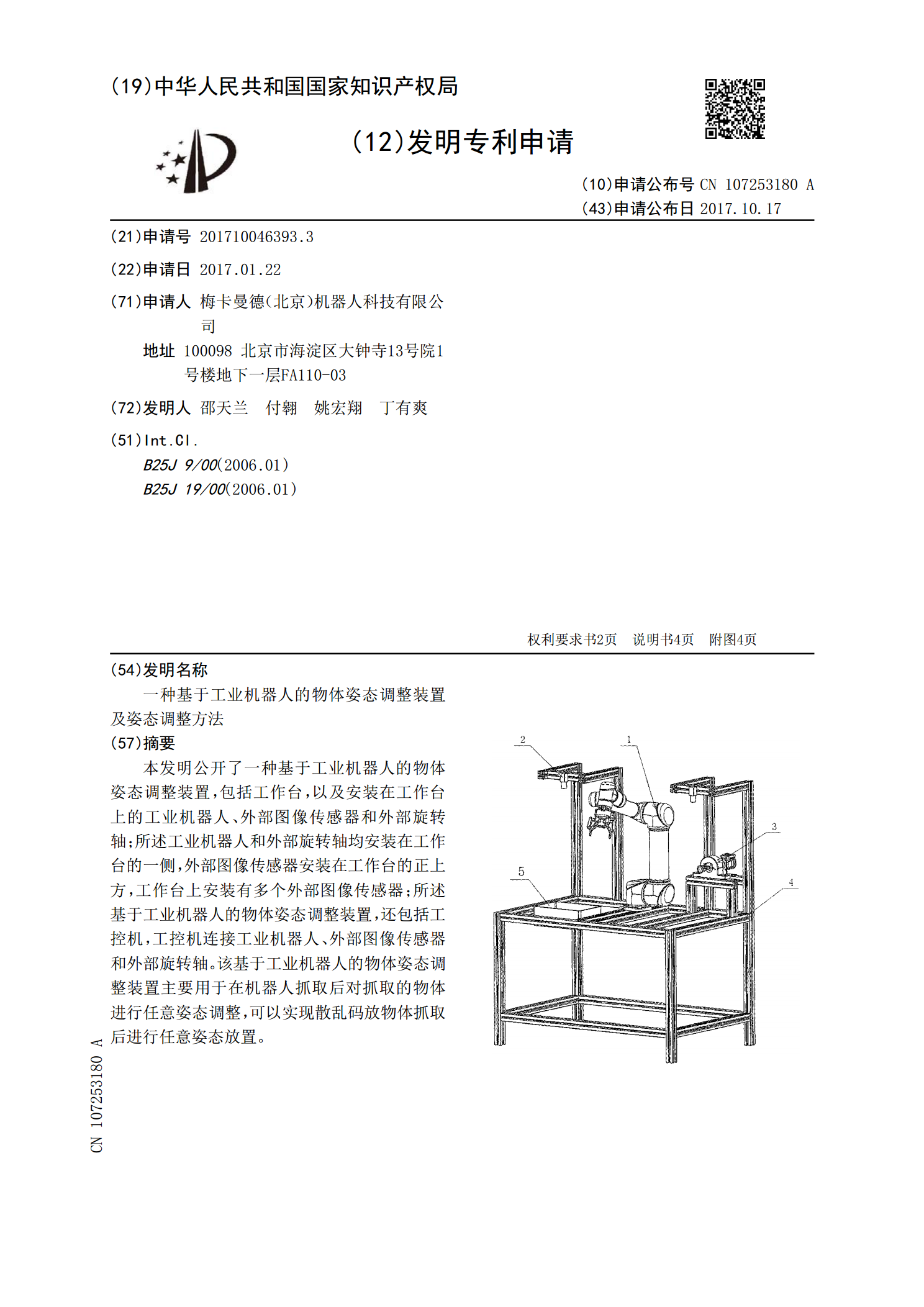
本发明公开了一种基于工业机器人的物体姿态调整装置,包括工作台,以及安装在工作台上的工业机器人、外部图像传感器和外部旋转轴;所述工业机器人和外部旋转轴均安装在工作台的一侧,外部图像传感器安装在工作台的正上方,工作台上安装有多个外部图像传感器;所述基于工业机器人的物体姿态调整装置,还包括工控机,工控机连接工业机器人、外部图像传感器和外部旋转轴。该基于工业机器人的物体姿态调整装置主要用于在机器人抓取后对抓取的物体进行任意姿态调整,可以实现散乱码放物体抓取后进行任意姿态放置。
人物姿态调整的方法及装置.pdf
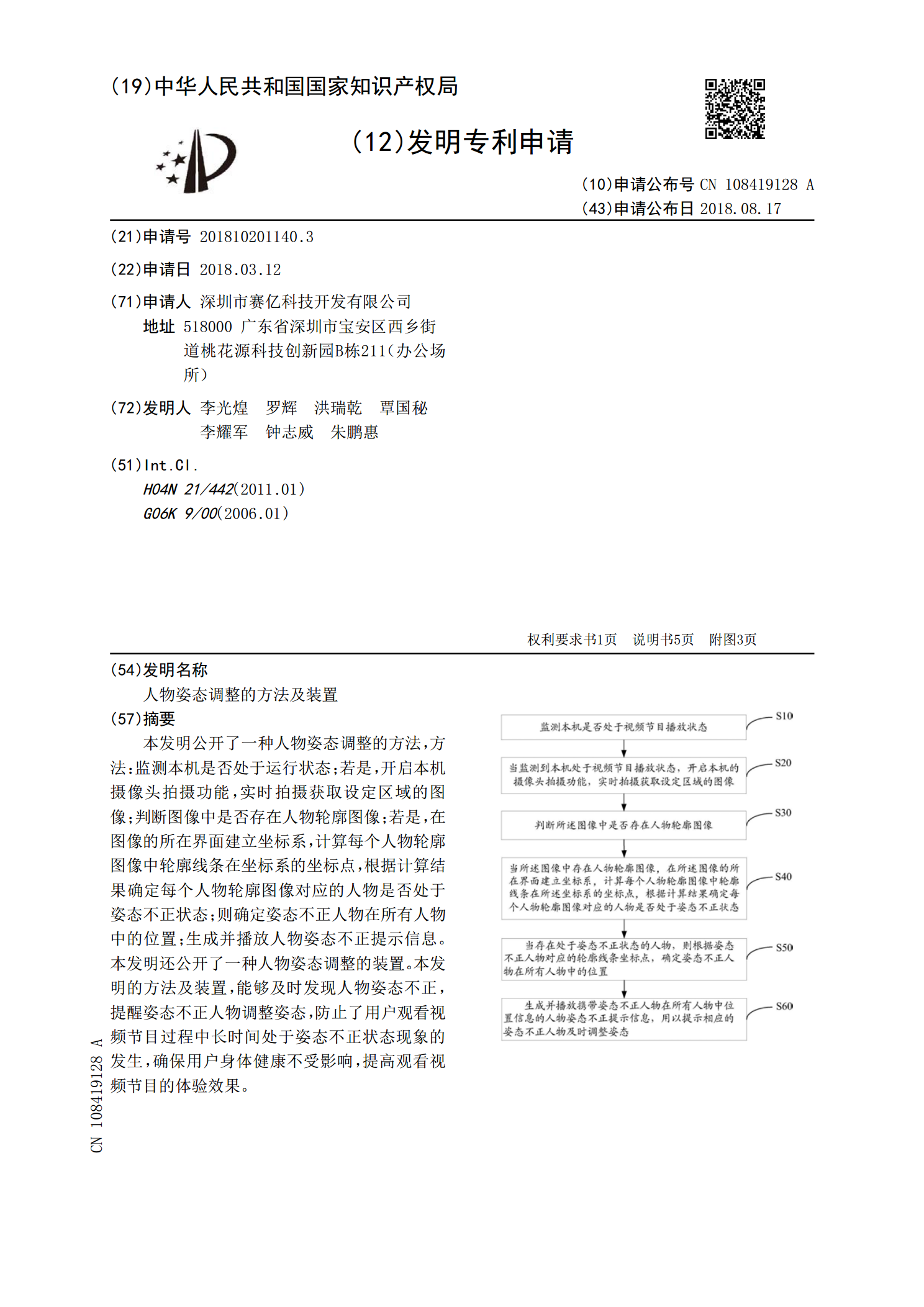
本发明公开了一种人物姿态调整的方法,方法:监测本机是否处于运行状态;若是,开启本机摄像头拍摄功能,实时拍摄获取设定区域的图像;判断图像中是否存在人物轮廓图像;若是,在图像的所在界面建立坐标系,计算每个人物轮廓图像中轮廓线条在坐标系的坐标点,根据计算结果确定每个人物轮廓图像对应的人物是否处于姿态不正状态;则确定姿态不正人物在所有人物中的位置;生成并播放人物姿态不正提示信息。本发明还公开了一种人物姿态调整的装置。本发明的方法及装置,能够及时发现人物姿态不正,提醒姿态不正人物调整姿态,防止了用户观看视频节目过程
一种苹果姿态精调装置及姿态调整设备.pdf
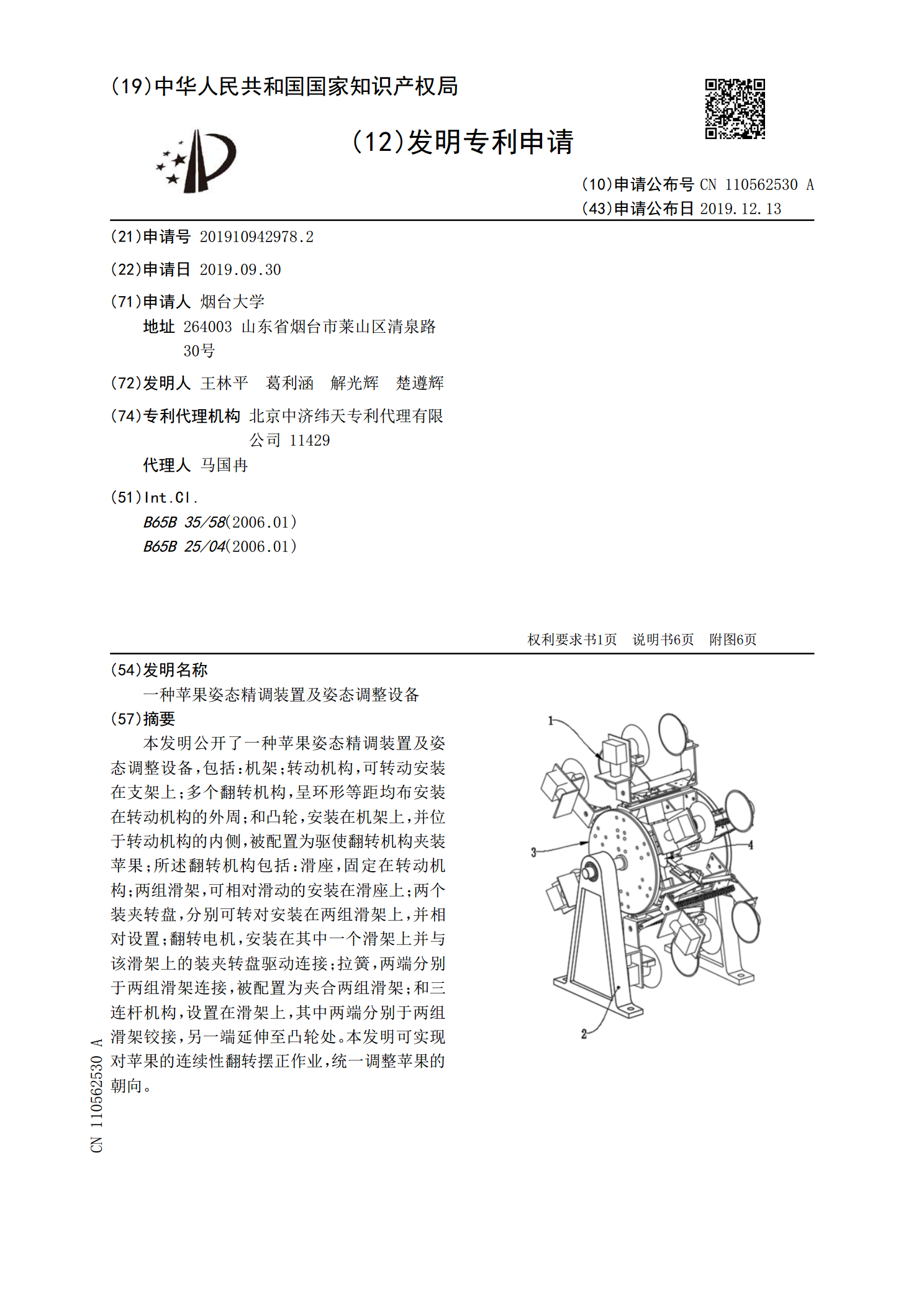
本发明公开了一种苹果姿态精调装置及姿态调整设备,包括:机架;转动机构,可转动安装在支架上;多个翻转机构,呈环形等距均布安装在转动机构的外周;和凸轮,安装在机架上,并位于转动机构的内侧,被配置为驱使翻转机构夹装苹果;所述翻转机构包括:滑座,固定在转动机构;两组滑架,可相对滑动的安装在滑座上;两个装夹转盘,分别可转对安装在两组滑架上,并相对设置;翻转电机,安装在其中一个滑架上并与该滑架上的装夹转盘驱动连接;拉簧,两端分别于两组滑架连接,被配置为夹合两组滑架;和三连杆机构,设置在滑架上,其中两端分别于两组滑架铰
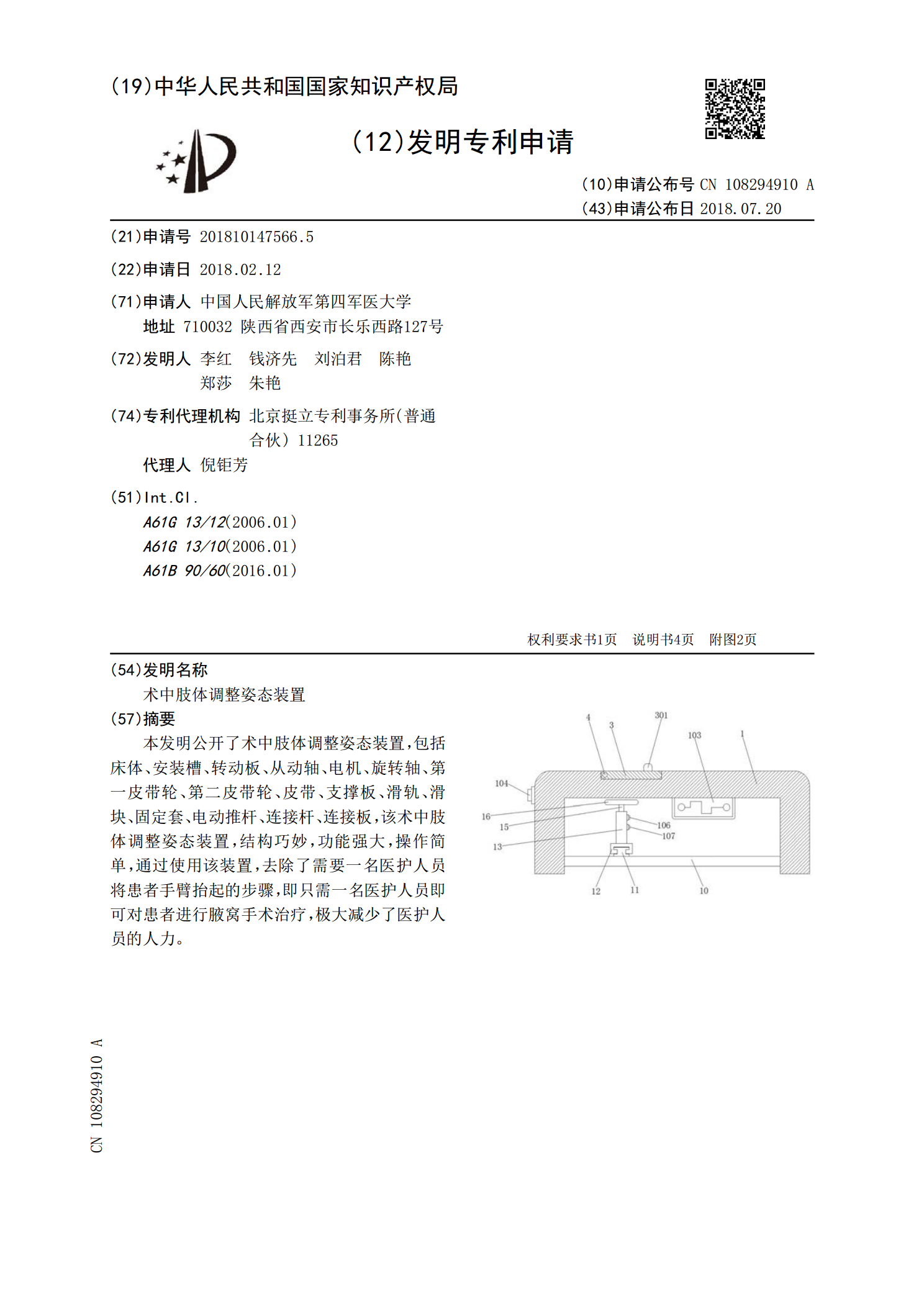
术中肢体调整姿态装置.pdf
本发明公开了术中肢体调整姿态装置,包括床体、安装槽、转动板、从动轴、电机、旋转轴、第一皮带轮、第二皮带轮、皮带、支撑板、滑轨、滑块、固定套、电动推杆、连接杆、连接板,该术中肢体调整姿态装置,结构巧妙,功能强大,操作简单,通过使用该装置,去除了需要一名医护人员将患者手臂抬起的步骤,即只需一名医护人员即可对患者进行腋窝手术治疗,极大减少了医护人员的人力。

运动姿态监测方法、调整方法、装置和终端.pdf
本发明实施例涉及运动数据分析领域,公开了一种运动姿态监测方法、调整方法、装置和终端。本发明中,一种运动姿态监测方法,应用于终端,包括:根据内置的加速度传感器获取当前用户的第一运动数据,并根据内置的重力传感器获取所述当前用户的第二运动数据;根据所述第一运动数据和所述第二运动数据确定所述当前用户的运动特征值;其中,所述运动特征值包括所述当前用户在运动过程中产生的加速度在重力方向上的分量;根据所述运动特征值确定所述当前用户的运动姿态,使得可以在运动过程中简易、方便地监测用户的运动姿态。