
用于利用持续换能器振动进行超声弹性成像的系统和方法.pdf

白凡****12


1/10

2/10

3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于利用持续换能器振动进行超声弹性成像的系统和方法.pdf
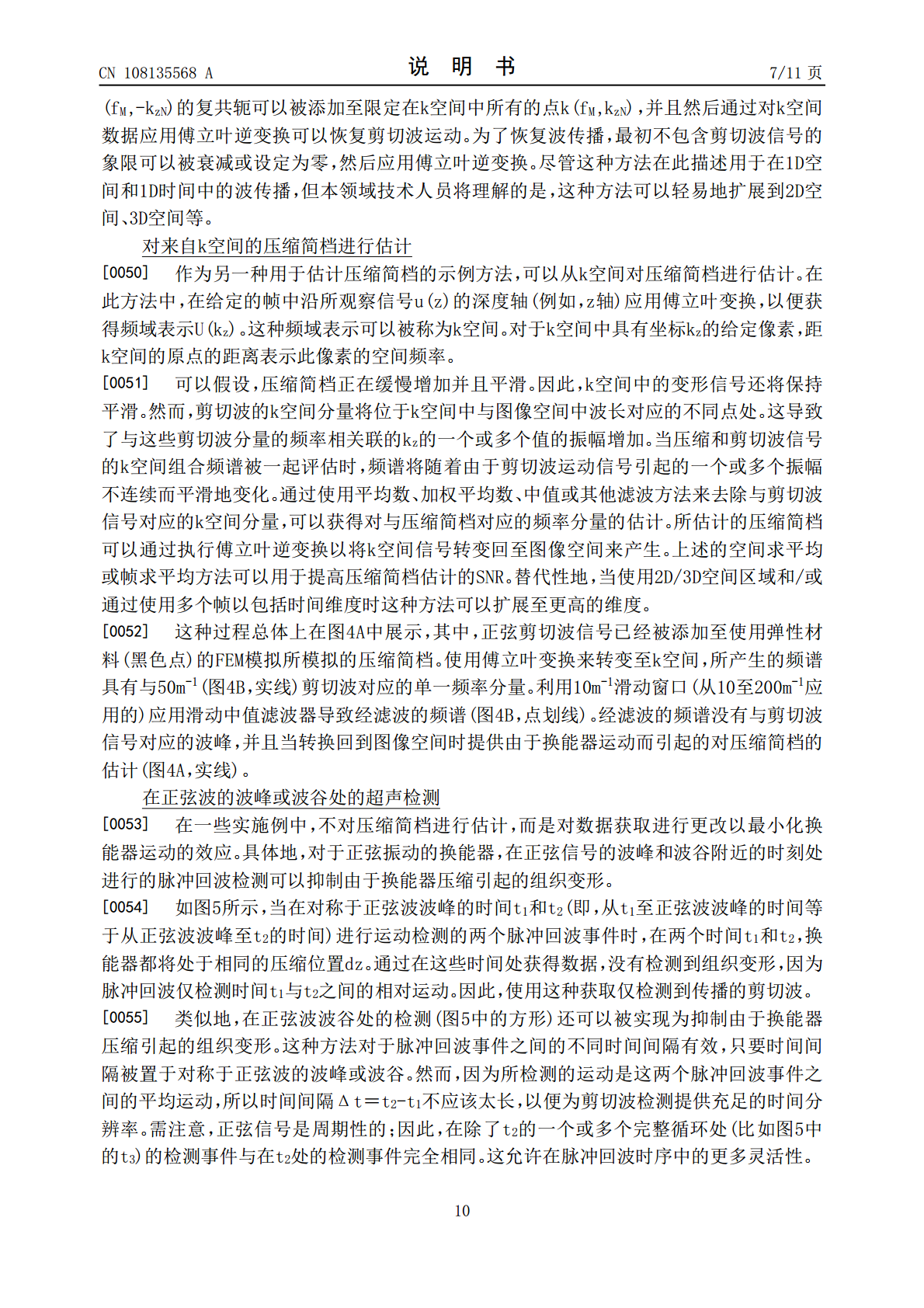
提供了用于处理使用超声弹性成像获取的数据的系统和方法,在所述系统和方法中,使用超声换能器的持续振动在对象中生成剪切波。在此描述的系统和方法可以有效地去除与所述超声换能器的振动相关联的运动伪影,并且还可以去除逐行成像模式用于获取数据(如许多常规超声扫描器完成的那样)时所造成的数据采样未对准。因此,在此描述的系统和方法提供用于换能器运动校正以及用于对准由逐行扫描超声系统检测到的运动信号的技术。
用于通过超声换能器的持续振动进行超声弹性成像的方法.pdf
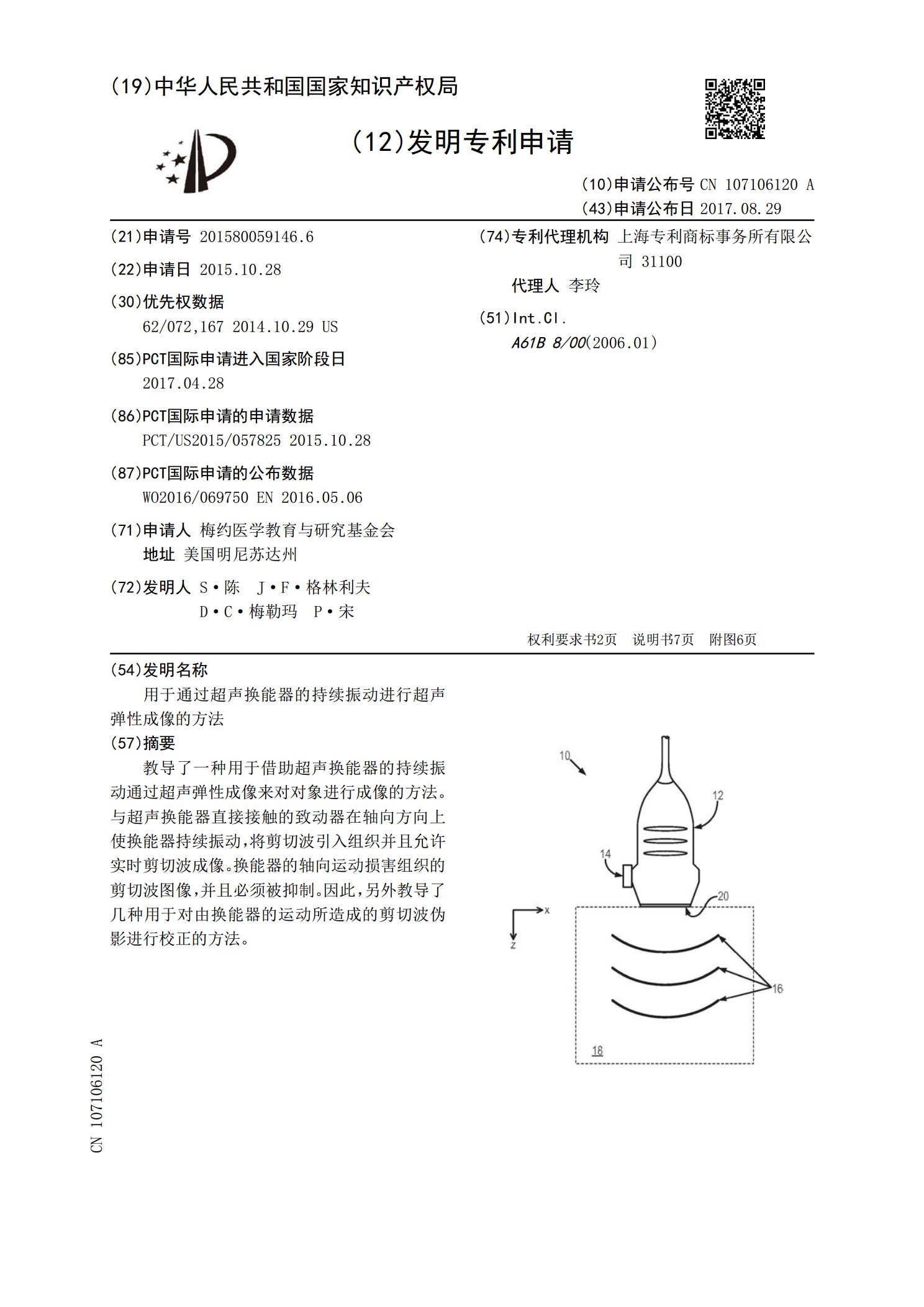
教导了一种用于借助超声换能器的持续振动通过超声弹性成像来对对象进行成像的方法。与超声换能器直接接触的致动器在轴向方向上使换能器持续振动,将剪切波引入组织并且允许实时剪切波成像。换能器的轴向运动损害组织的剪切波图像,并且必须被抑制。因此,另外教导了几种用于对由换能器的运动所造成的剪切波伪影进行校正的方法。

通过利用超声换能器元件的子群发射超声来进行剪切波弹性成像的系统和方法.pdf
利用推进和/或检测超声波束进行剪切波弹性成像的系统和方法,其中超声波束是由超声换能器中可用数目的换能器元件的子集生成的。这些技术与目前可用的剪切波弹性成像方法相比提供了一些优势,包括能够利用标准、低帧频超声成像系统以及能够贯穿整个视场、而不是仅那些未生成推进波束的区域来测量剪切波速。

用于采集材料的声弹性成像数据和超声数据的换能器配置和方法.pdf
本发明涉及一种换能器配置,特别是用于采集组织信息的换能器配置、使用换能器配置来采集组织信息的方法以及包括换能器配置的手套。用于分析材料40的换能器配置21包括:第一换能器元件51,用于诱发以及接收待分析材料40中的机械位移;以及分析单元30。该换能器配置布置成是柔性的,从而适应待分析材料40的弯曲表面;且换能器配置21适合于从机械位移的低频频谱导出第一信号,该第一信号关联到待分析材料40的声弹性成像性质;并且换能器配置21适合于从由第一换能器元件51接收的机械位移的高频频谱导出第二信号51,该第二信号关联
用于由超声成像数据对针进行成像的方法和系统.pdf
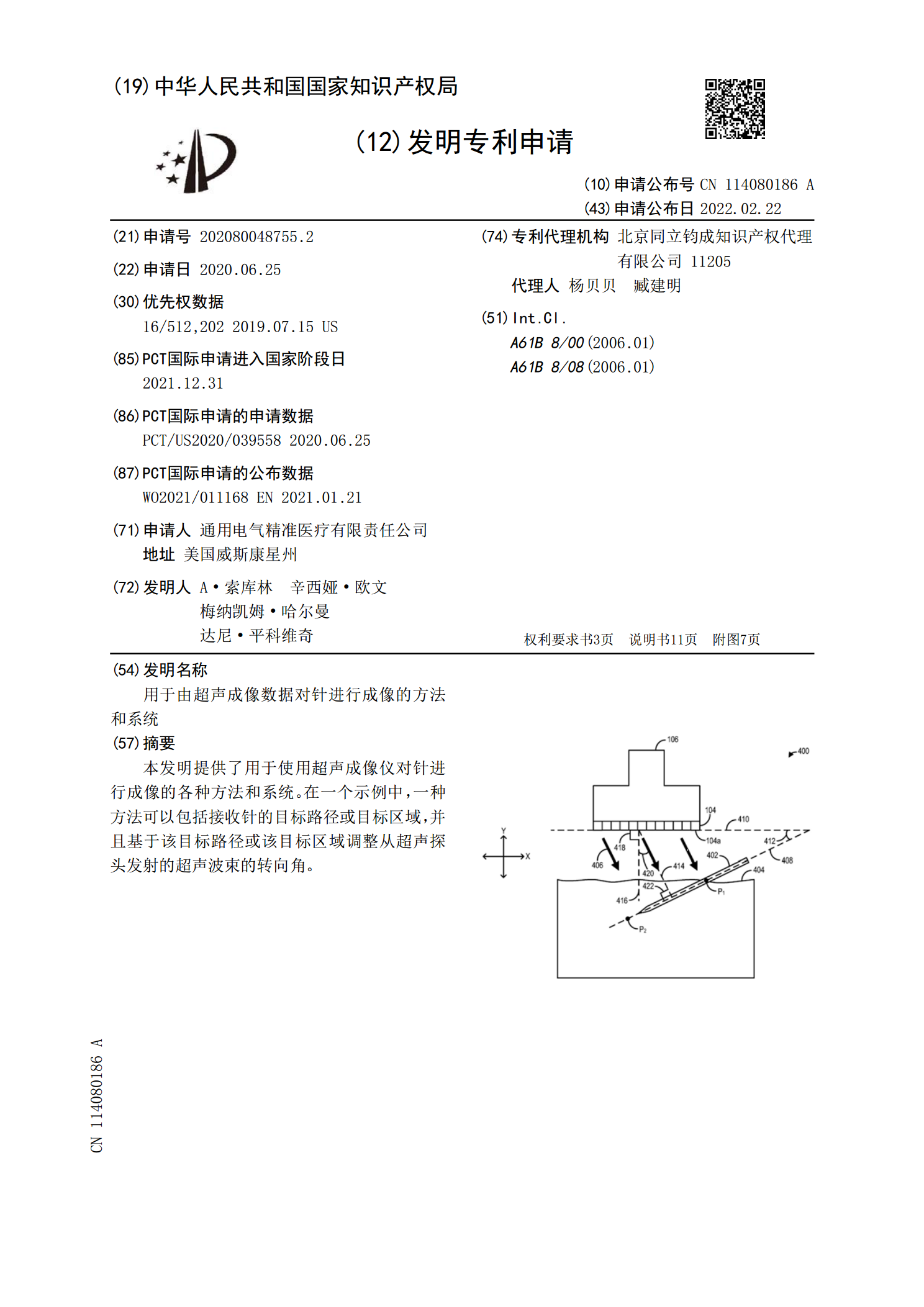
本发明提供了用于使用超声成像仪对针进行成像的各种方法和系统。在一个示例中,一种方法可以包括接收针的目标路径或目标区域,并且基于该目标路径或该目标区域调整从超声探头发射的超声波束的转向角。