
一种吸附式焊接装置.pdf

a是****澜吖


1/5

2/5

3/5
4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种吸附式焊接装置.pdf
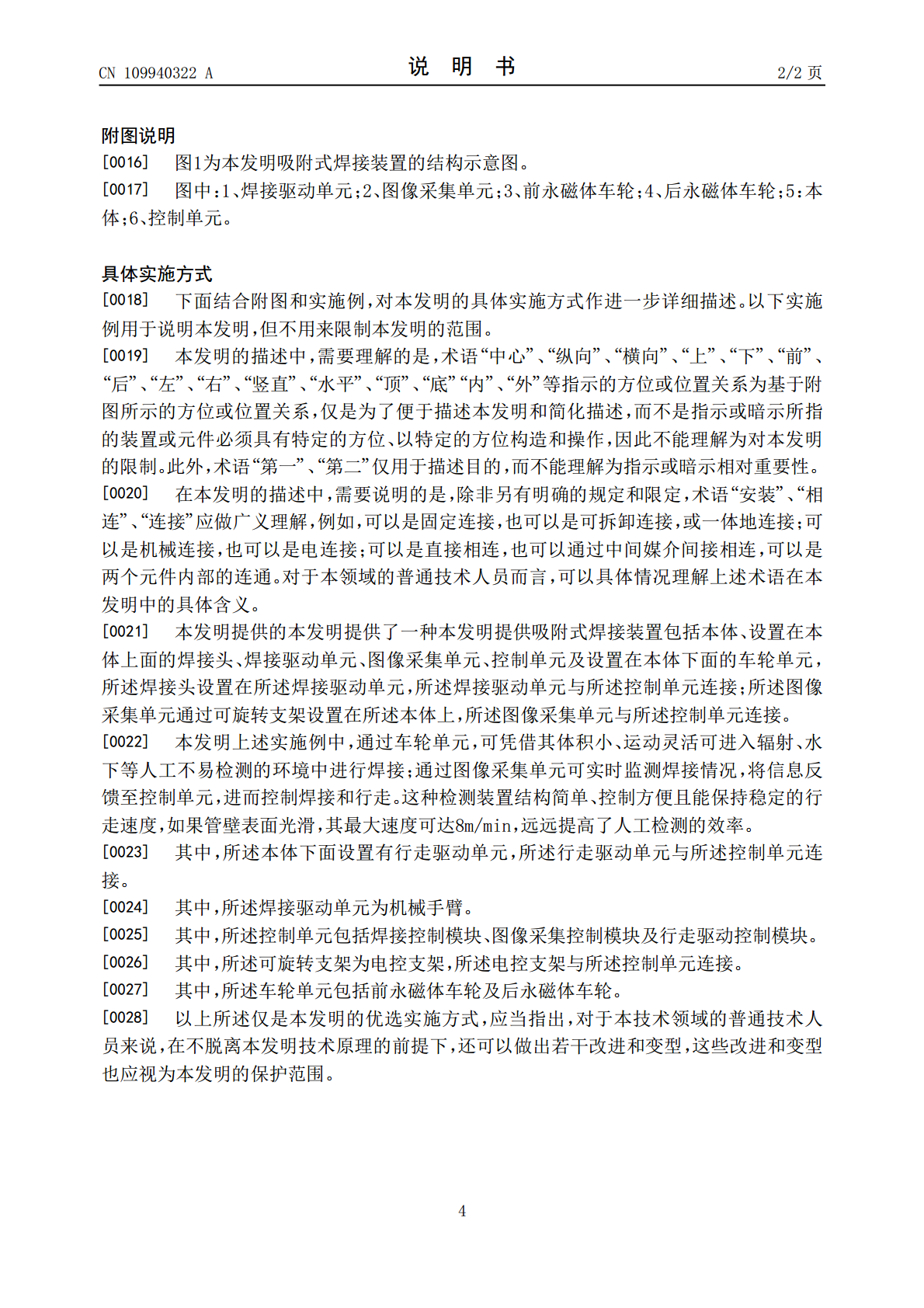
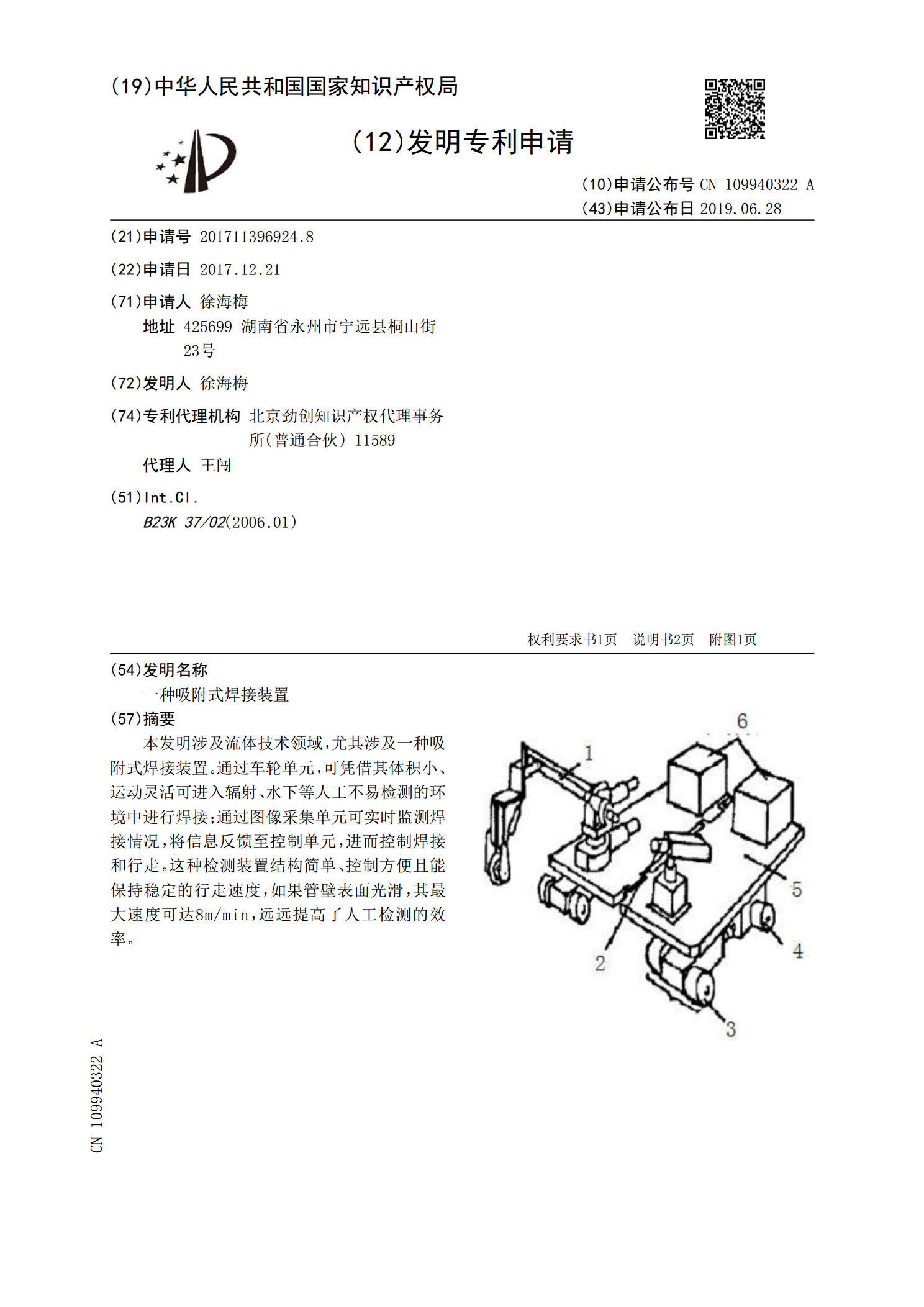
本发明涉及流体技术领域,尤其涉及一种吸附式焊接装置。通过车轮单元,可凭借其体积小、运动灵活可进入辐射、水下等人工不易检测的环境中进行焊接;通过图像采集单元可实时监测焊接情况,将信息反馈至控制单元,进而控制焊接和行走。这种检测装置结构简单、控制方便且能保持稳定的行走速度,如果管壁表面光滑,其最大速度可达8m/min,远远提高了人工检测的效率。

一种吸附式传送装置.pdf
本实用新型涉及传送装置技术领域,且公开了一种吸附式传送装置,包括第一工作板,所述第一工作板的顶部活动设置有减震垫,所述减震垫的顶部固定粘贴有支撑板,所述支撑板的顶部固定连接有支撑杆,所述支撑杆的顶部固定连接有支撑腿,所述支撑腿的顶部固定连接有吸附装置,所述吸附装置包括:第二支撑板,固定连接在支撑腿的顶部,皮带机,固定设置在第二支撑板的外壁,第一箱体,固定连接在第二支撑板的外壁,通孔,开设在第一箱体的外壁。通过设置吸附装置,达到了方便机械传送塑制品,避免工人消耗体力对塑制品进行传送,从而容易造成塑制品的损坏
一种吸附式干燥装置.pdf
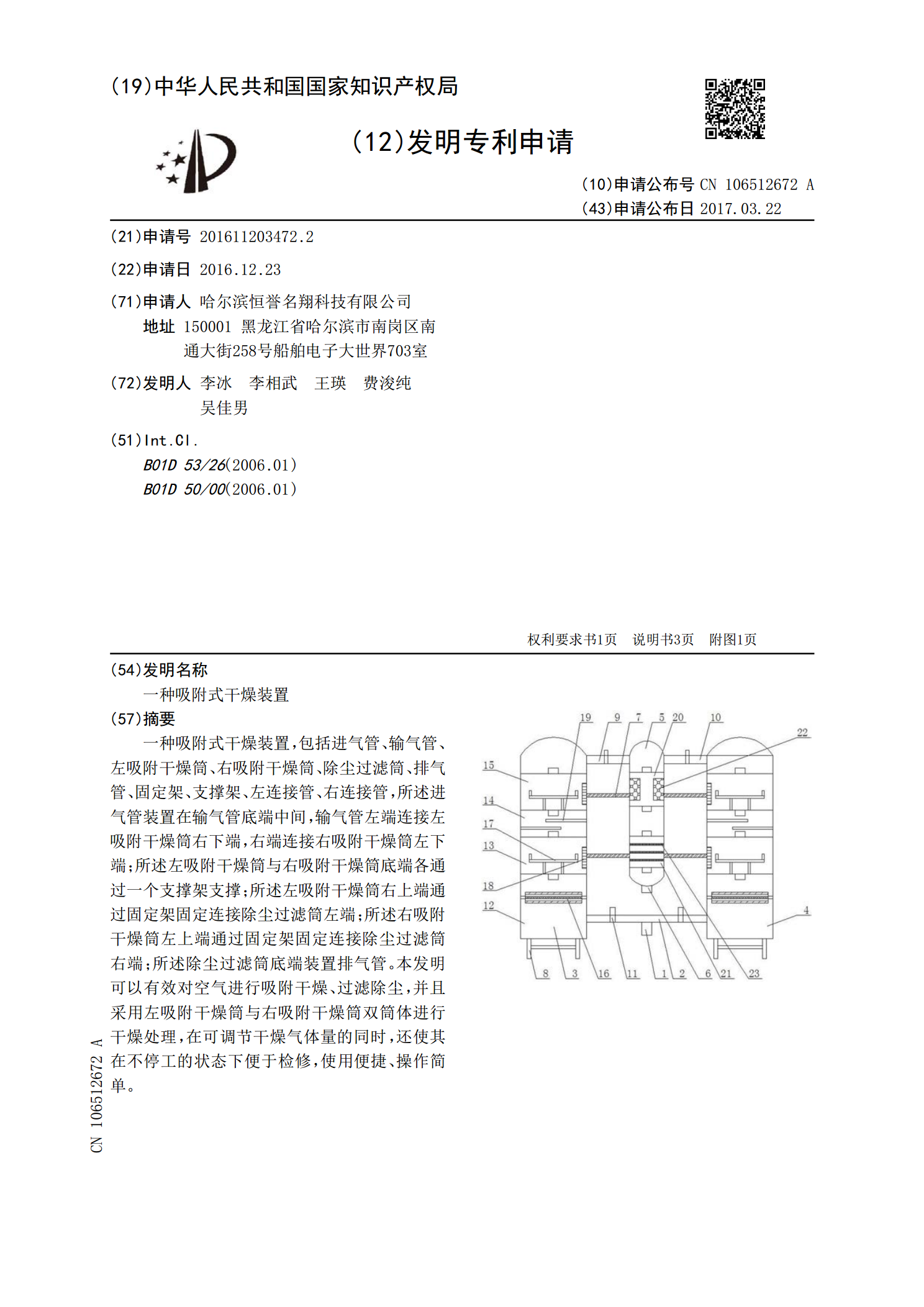
一种吸附式干燥装置,包括进气管、输气管、左吸附干燥筒、右吸附干燥筒、除尘过滤筒、排气管、固定架、支撑架、左连接管、右连接管,所述进气管装置在输气管底端中间,输气管左端连接左吸附干燥筒右下端,右端连接右吸附干燥筒左下端;所述左吸附干燥筒与右吸附干燥筒底端各通过一个支撑架支撑;所述左吸附干燥筒右上端通过固定架固定连接除尘过滤筒左端;所述右吸附干燥筒左上端通过固定架固定连接除尘过滤筒右端;所述除尘过滤筒底端装置排气管。本发明可以有效对空气进行吸附干燥、过滤除尘,并且采用左吸附干燥筒与右吸附干燥筒双筒体进行干燥处
一种焊接式绕线辊焊接装置.pdf
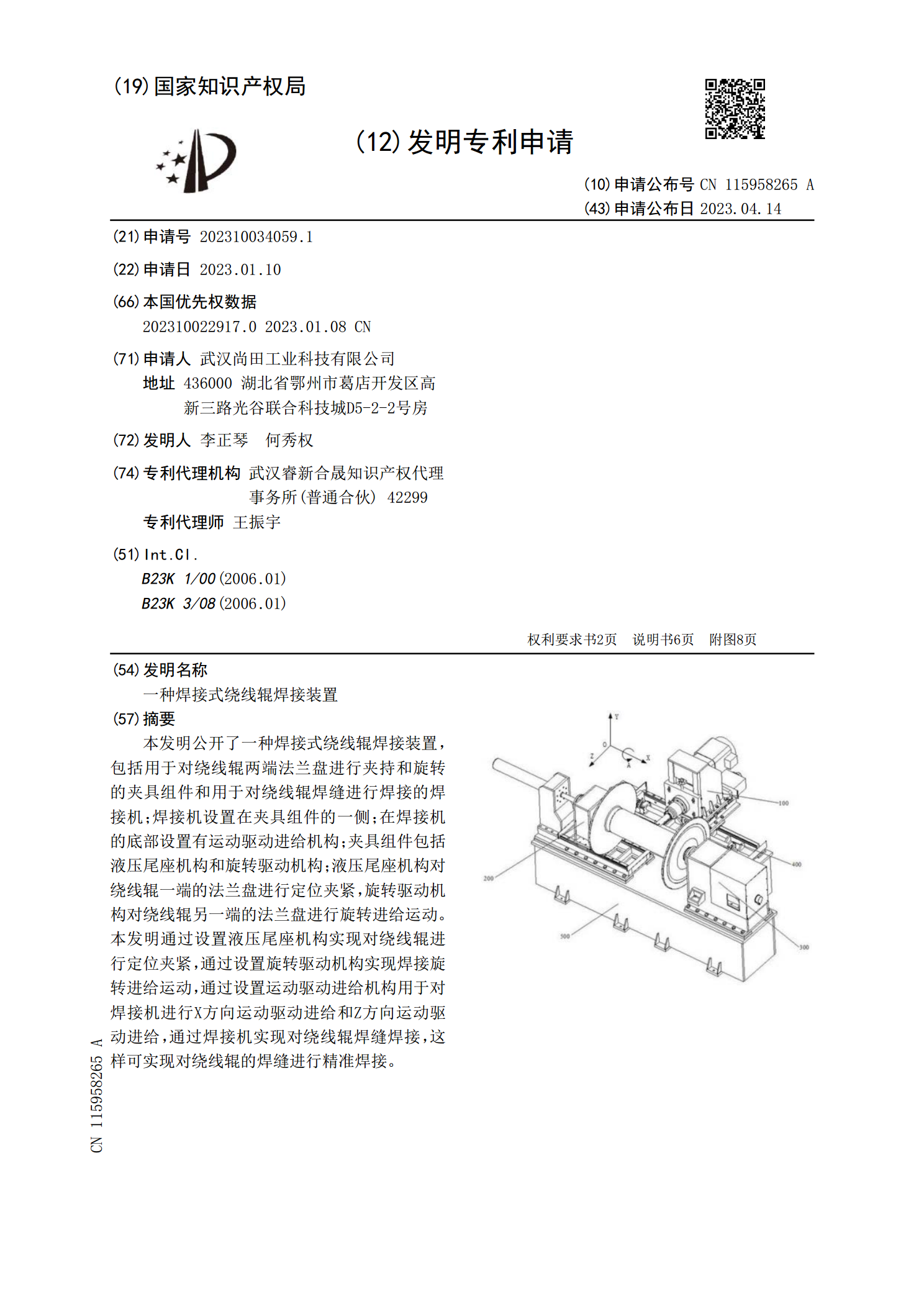
本发明公开了一种焊接式绕线辊焊接装置,包括用于对绕线辊两端法兰盘进行夹持和旋转的夹具组件和用于对绕线辊焊缝进行焊接的焊接机;焊接机设置在夹具组件的一侧;在焊接机的底部设置有运动驱动进给机构;夹具组件包括液压尾座机构和旋转驱动机构;液压尾座机构对绕线辊一端的法兰盘进行定位夹紧,旋转驱动机构对绕线辊另一端的法兰盘进行旋转进给运动。本发明通过设置液压尾座机构实现对绕线辊进行定位夹紧,通过设置旋转驱动机构实现焊接旋转进给运动,通过设置运动驱动进给机构用于对焊接机进行X方向运动驱动进给和Z方向运动驱动进给,通过焊接
一种吸附式玻璃清洁装置.pdf
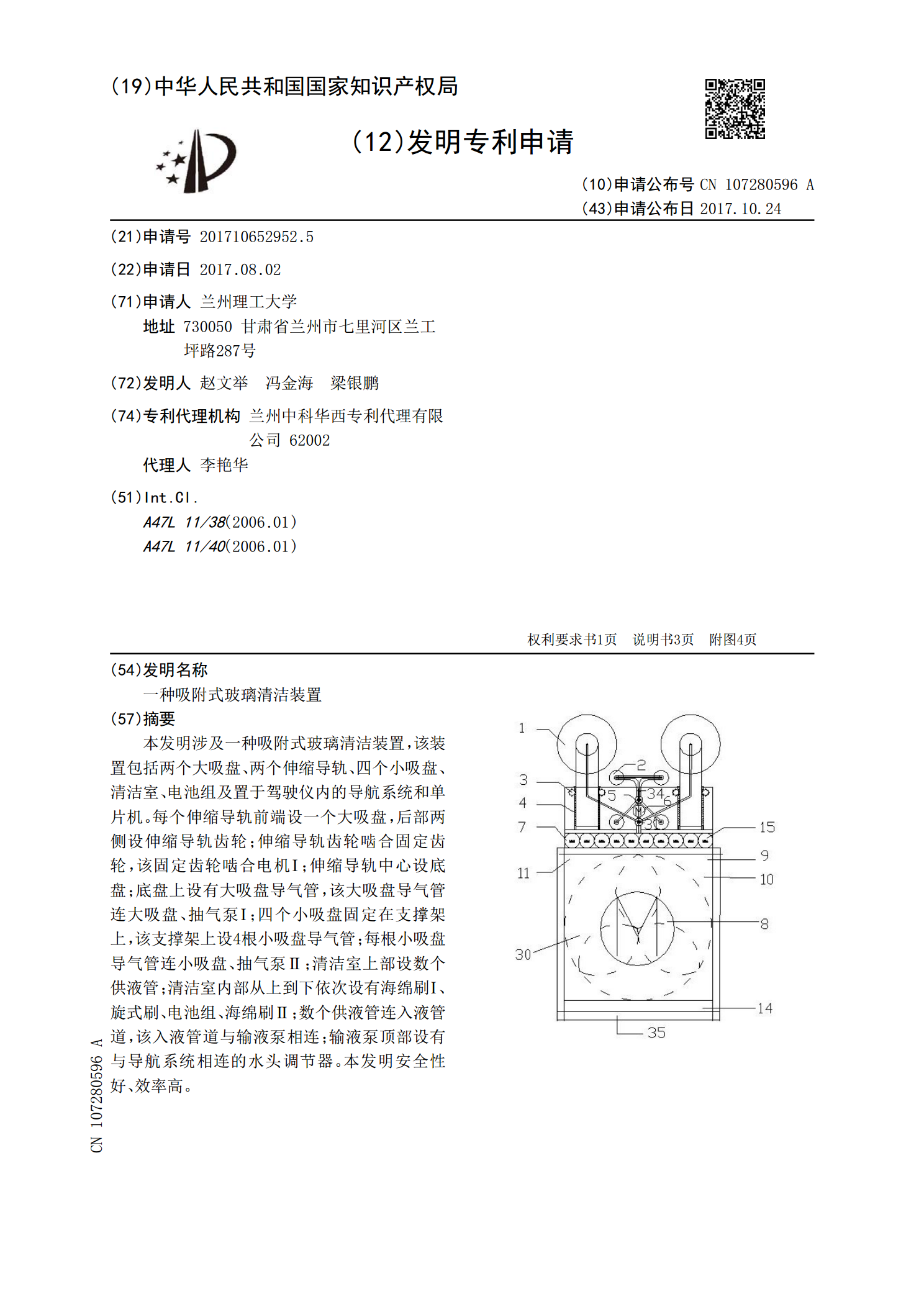
本发明涉及一种吸附式玻璃清洁装置,该装置包括两个大吸盘、两个伸缩导轨、四个小吸盘、清洁室、电池组及置于驾驶仪内的导航系统和单片机。每个伸缩导轨前端设一个大吸盘,后部两侧设伸缩导轨齿轮;伸缩导轨齿轮啮合固定齿轮,该固定齿轮啮合电机Ⅰ;伸缩导轨中心设底盘;底盘上设有大吸盘导气管,该大吸盘导气管连大吸盘、抽气泵Ⅰ;四个小吸盘固定在支撑架上,该支撑架上设4根小吸盘导气管;每根小吸盘导气管连小吸盘、抽气泵Ⅱ;清洁室上部设数个供液管;清洁室内部从上到下依次设有海绵刷Ⅰ、旋式刷、电池组、海绵刷Ⅱ;数个供液管连入液管道,