
智能清障车.pdf

岚风****55


1/10
2/10
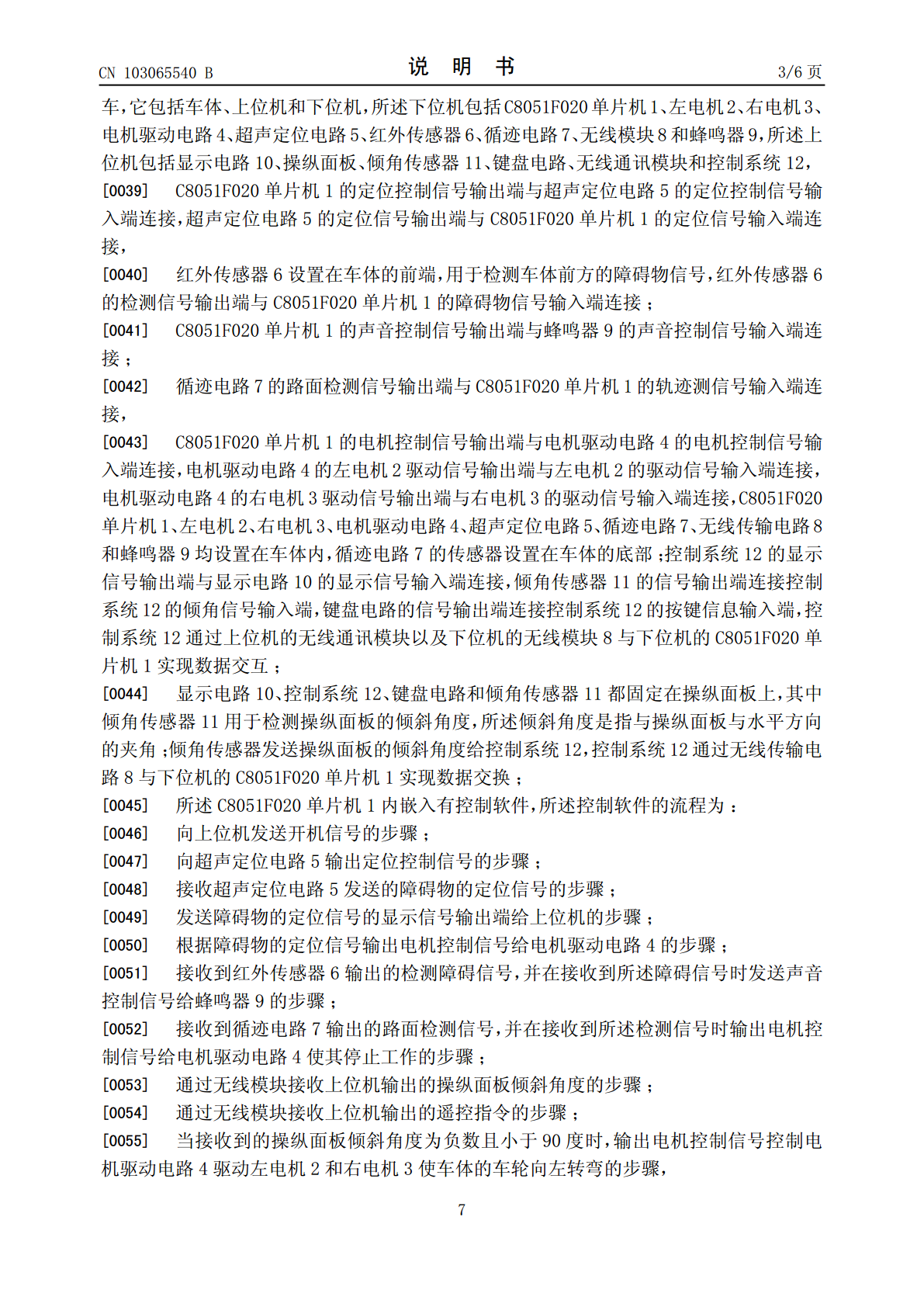
3/10

4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能清障车.pdf
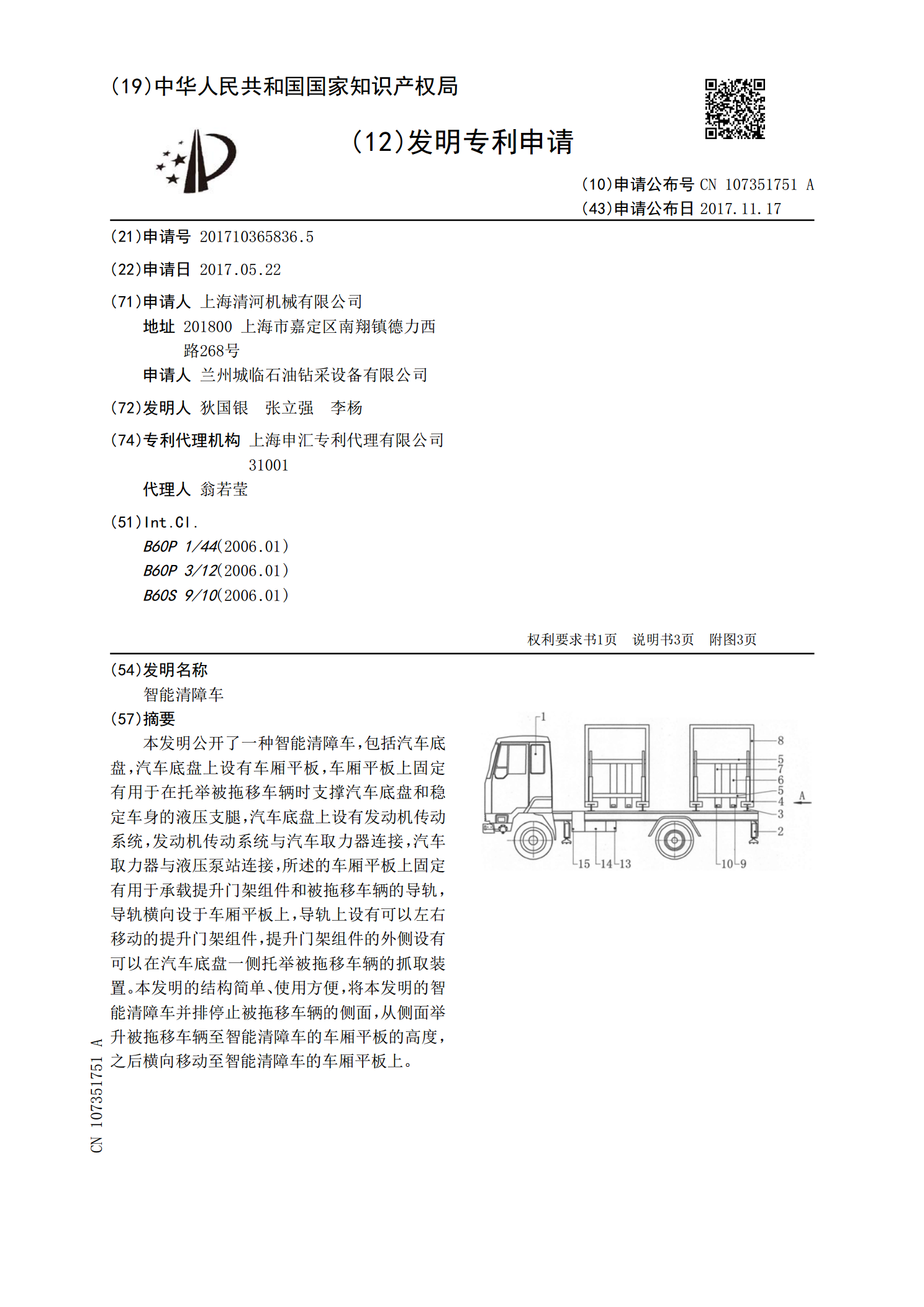
本发明公开了一种智能清障车,包括汽车底盘,汽车底盘上设有车厢平板,车厢平板上固定有用于在托举被拖移车辆时支撑汽车底盘和稳定车身的液压支腿,汽车底盘上设有发动机传动系统,发动机传动系统与汽车取力器连接,汽车取力器与液压泵站连接,所述的车厢平板上固定有用于承载提升门架组件和被拖移车辆的导轨,导轨横向设于车厢平板上,导轨上设有可以左右移动的提升门架组件,提升门架组件的外侧设有可以在汽车底盘一侧托举被拖移车辆的抓取装置。本发明的结构简单、使用方便,将本发明的智能清障车并排停止被拖移车辆的侧面,从侧面举升被拖移车辆
智能清障车.pdf
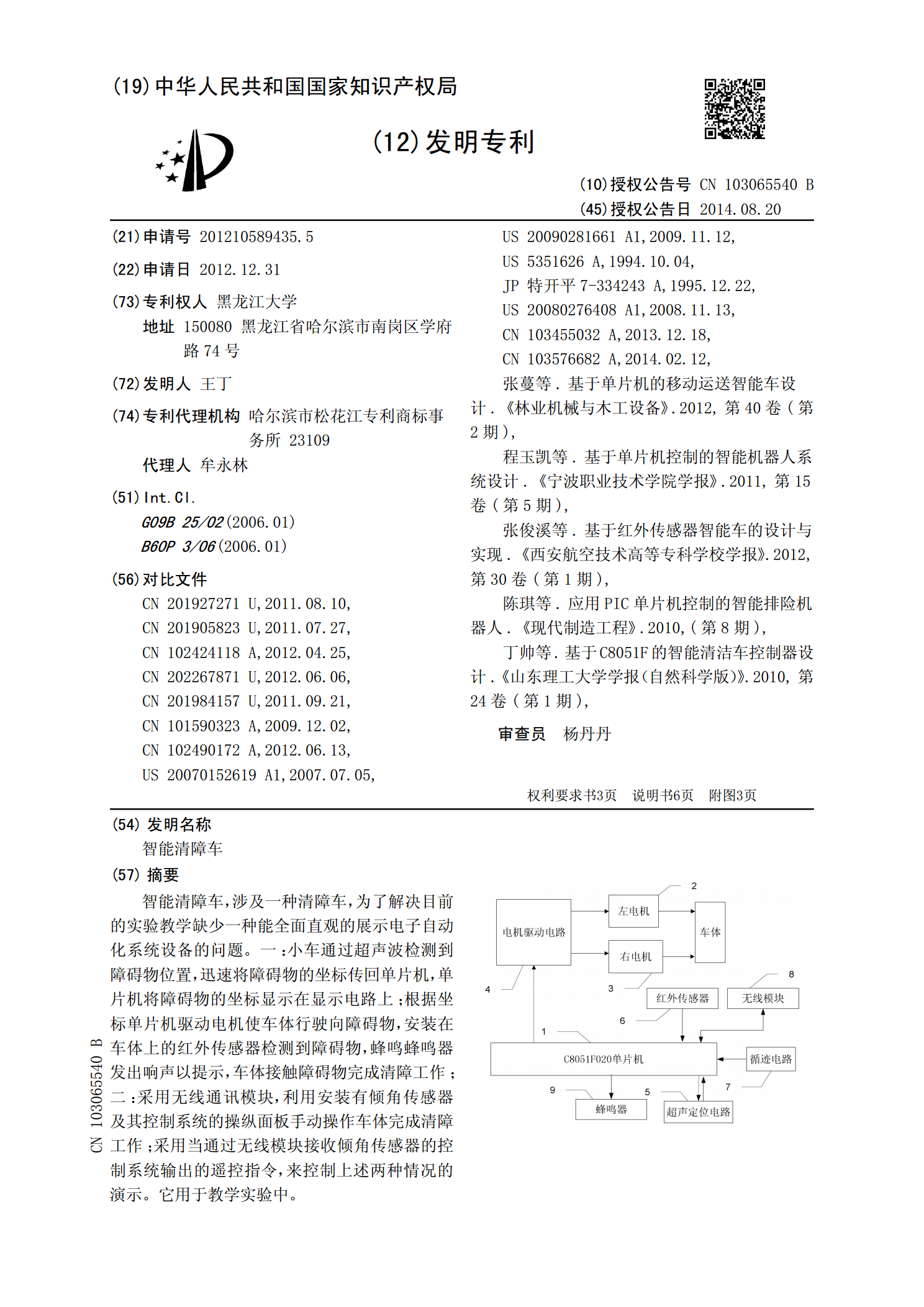
智能清障车,涉及一种清障车,为了解决目前的实验教学缺少一种能全面直观的展示电子自动化系统设备的问题。一:小车通过超声波检测到障碍物位置,迅速将障碍物的坐标传回单片机,单片机将障碍物的坐标显示在显示电路上;根据坐标单片机驱动电机使车体行驶向障碍物,安装在车体上的红外传感器检测到障碍物,蜂鸣蜂鸣器发出响声以提示,车体接触障碍物完成清障工作;二:采用无线通讯模块,利用安装有倾角传感器及其控制系统的操纵面板手动操作车体完成清障工作;采用当通过无线模块接收倾角传感器的控制系统输出的遥控指令,来控制上述两种情况的演示

一种智能型城市道路清障车.pdf
本发明公开了一种智能型城市道路清障车,清障车包括车头、驾驶室、底盘、车轮和清障系统,清障系统包括控制系统和执行系统,控制系统包括设置在驾驶室内的控制面板及与控制面板连接的PLC电气控制系统,执行系统包括清障托盘,清障托盘包括两相对设置的清障托架,两相对设置的清障托架分别从待清障车两侧固定车轮并托起待清障车,PLC电气控制系统控制清障托架升降和移动;本发明的一种智能型城市道路清障车,在清障过程中,操作员无需下车,在驾驶室内即可完成清障车的固定和清障,安全系数高。
管道疏通清障车.pdf
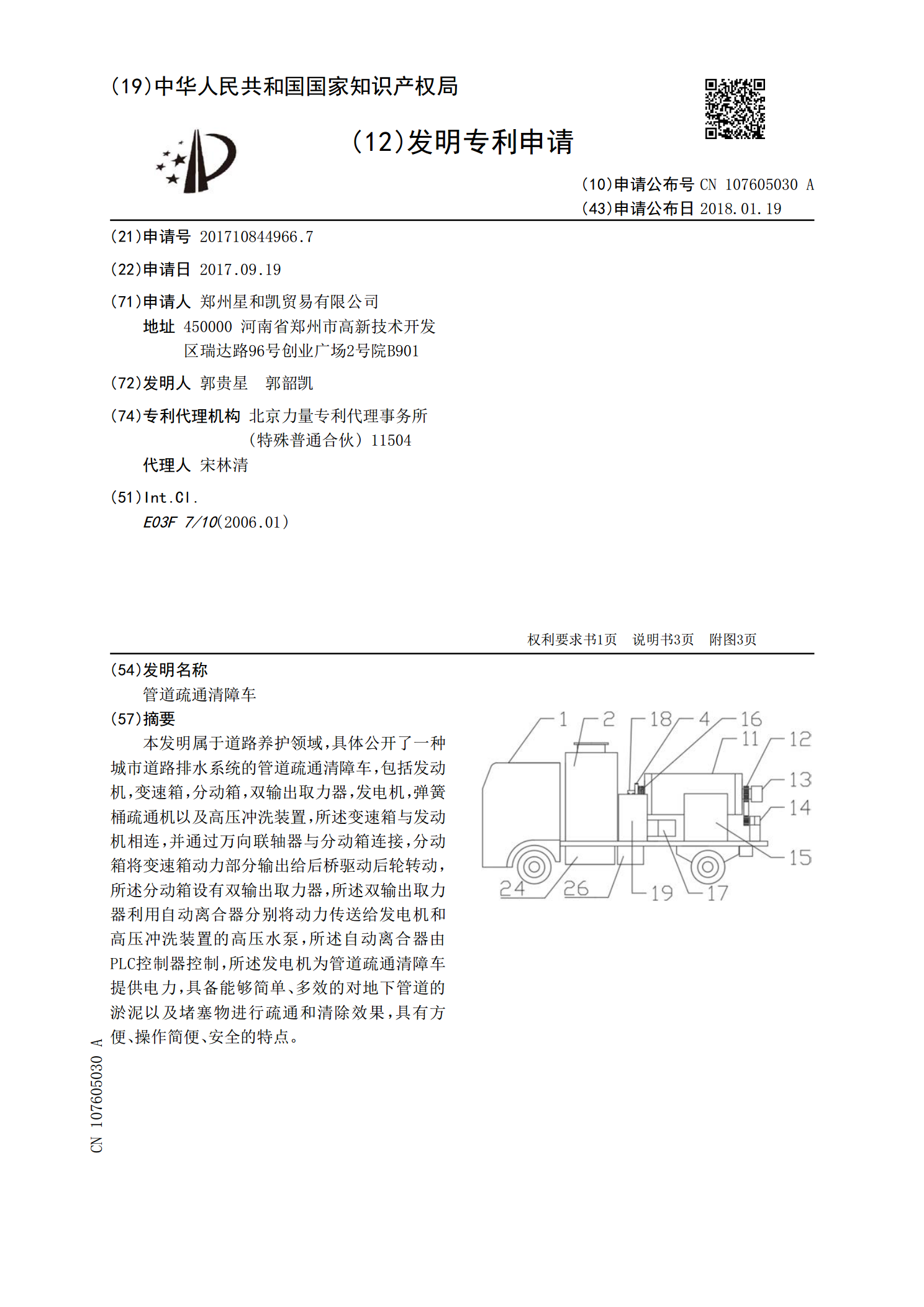
本发明属于道路养护领域,具体公开了一种城市道路排水系统的管道疏通清障车,包括发动机,变速箱,分动箱,双输出取力器,发电机,弹簧桶疏通机以及高压冲洗装置,所述变速箱与发动机相连,并通过万向联轴器与分动箱连接,分动箱将变速箱动力部分输出给后桥驱动后轮转动,所述分动箱设有双输出取力器,所述双输出取力器利用自动离合器分别将动力传送给发电机和高压冲洗装置的高压水泵,所述自动离合器由PLC控制器控制,所述发电机为管道疏通清障车提供电力,具备能够简单、多效的对地下管道的淤泥以及堵塞物进行疏通和清除效果,具有方便、操作简
吊装式清障车.pdf
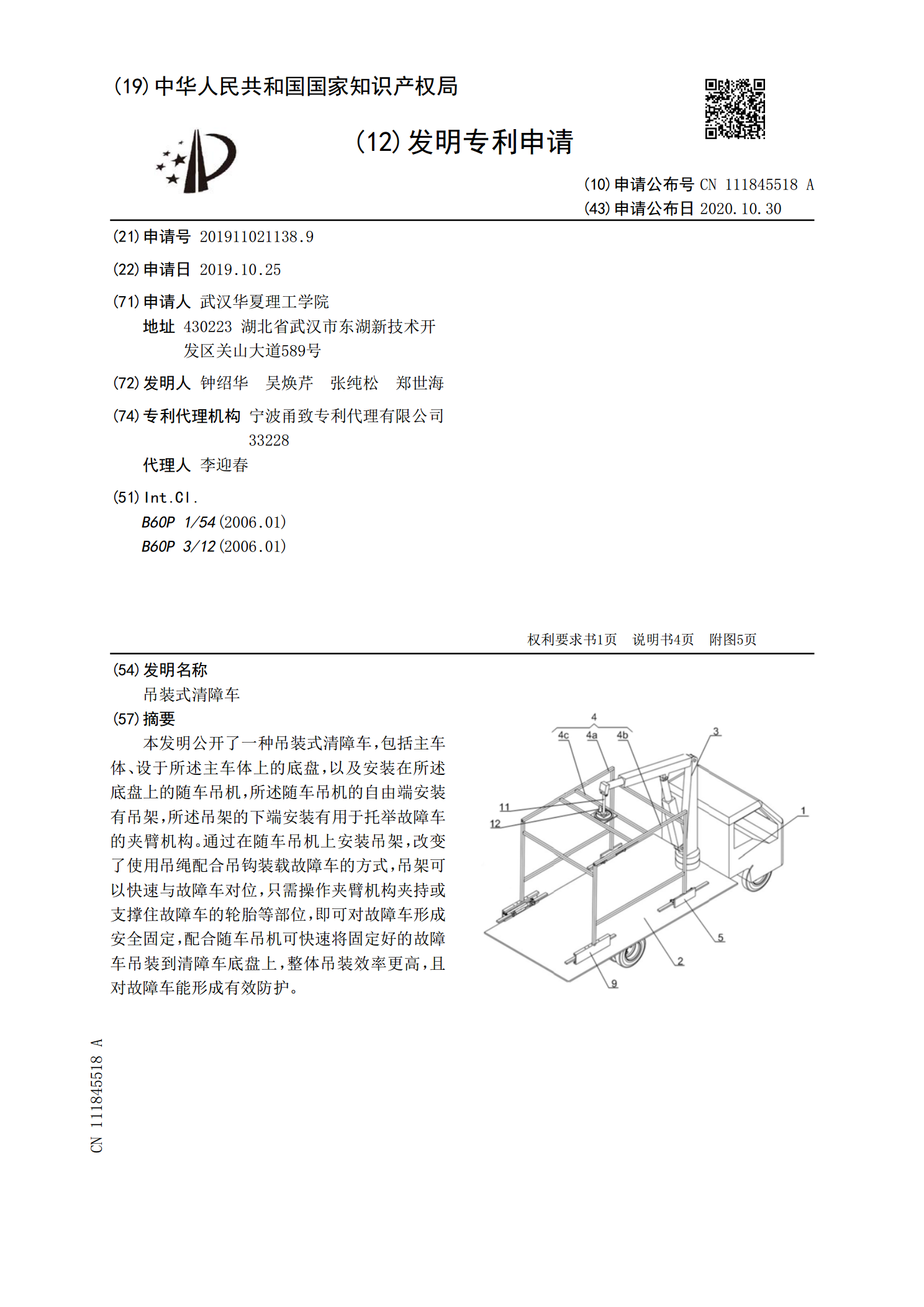
本发明公开了一种吊装式清障车,包括主车体、设于所述主车体上的底盘,以及安装在所述底盘上的随车吊机,所述随车吊机的自由端安装有吊架,所述吊架的下端安装有用于托举故障车的夹臂机构。通过在随车吊机上安装吊架,改变了使用吊绳配合吊钩装载故障车的方式,吊架可以快速与故障车对位,只需操作夹臂机构夹持或支撑住故障车的轮胎等部位,即可对故障车形成安全固定,配合随车吊机可快速将固定好的故障车吊装到清障车底盘上,整体吊装效率更高,且对故障车能形成有效防护。