
蜂窝网环境下基于PCA的子空间匹配室内指纹定位方法.pdf

秀华****魔王

1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
蜂窝网环境下基于PCA的子空间匹配室内指纹定位方法.pdf
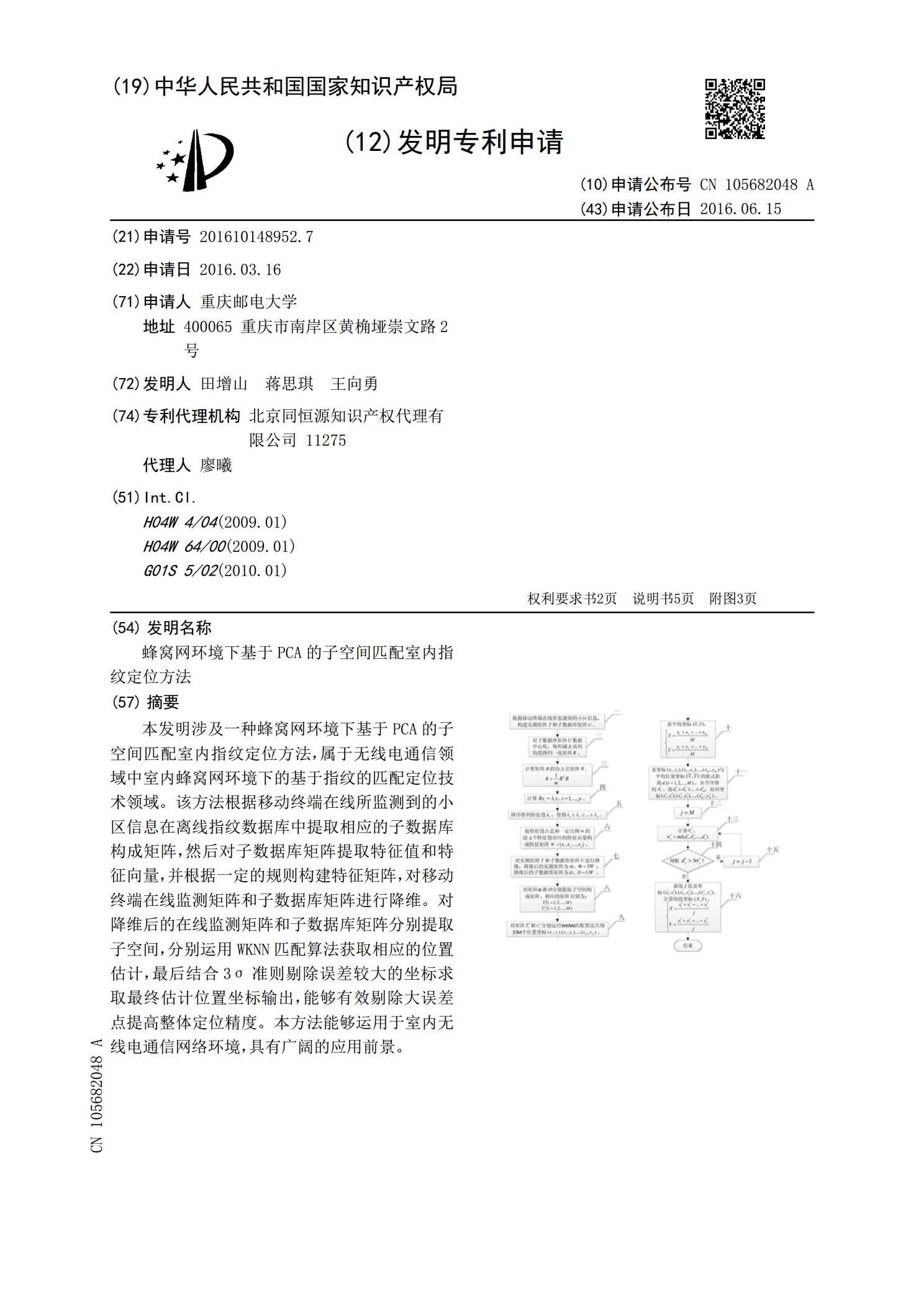
本发明涉及一种蜂窝网环境下基于PCA的子空间匹配室内指纹定位方法,属于无线电通信领域中室内蜂窝网环境下的基于指纹的匹配定位技术领域。该方法根据移动终端在线所监测到的小区信息在离线指纹数据库中提取相应的子数据库构成矩阵,然后对子数据库矩阵提取特征值和特征向量,并根据一定的规则构建特征矩阵,对移动终端在线监测矩阵和子数据库矩阵进行降维。对降维后的在线监测矩阵和子数据库矩阵分别提取子空间,分别运用WKNN匹配算法获取相应的位置估计,最后结合3σ准则剔除误差较大的坐标求取最终估计位置坐标输出,能够有效剔除大误差点
基于位置指纹匹配的蜂窝网络无线定位方法.pdf
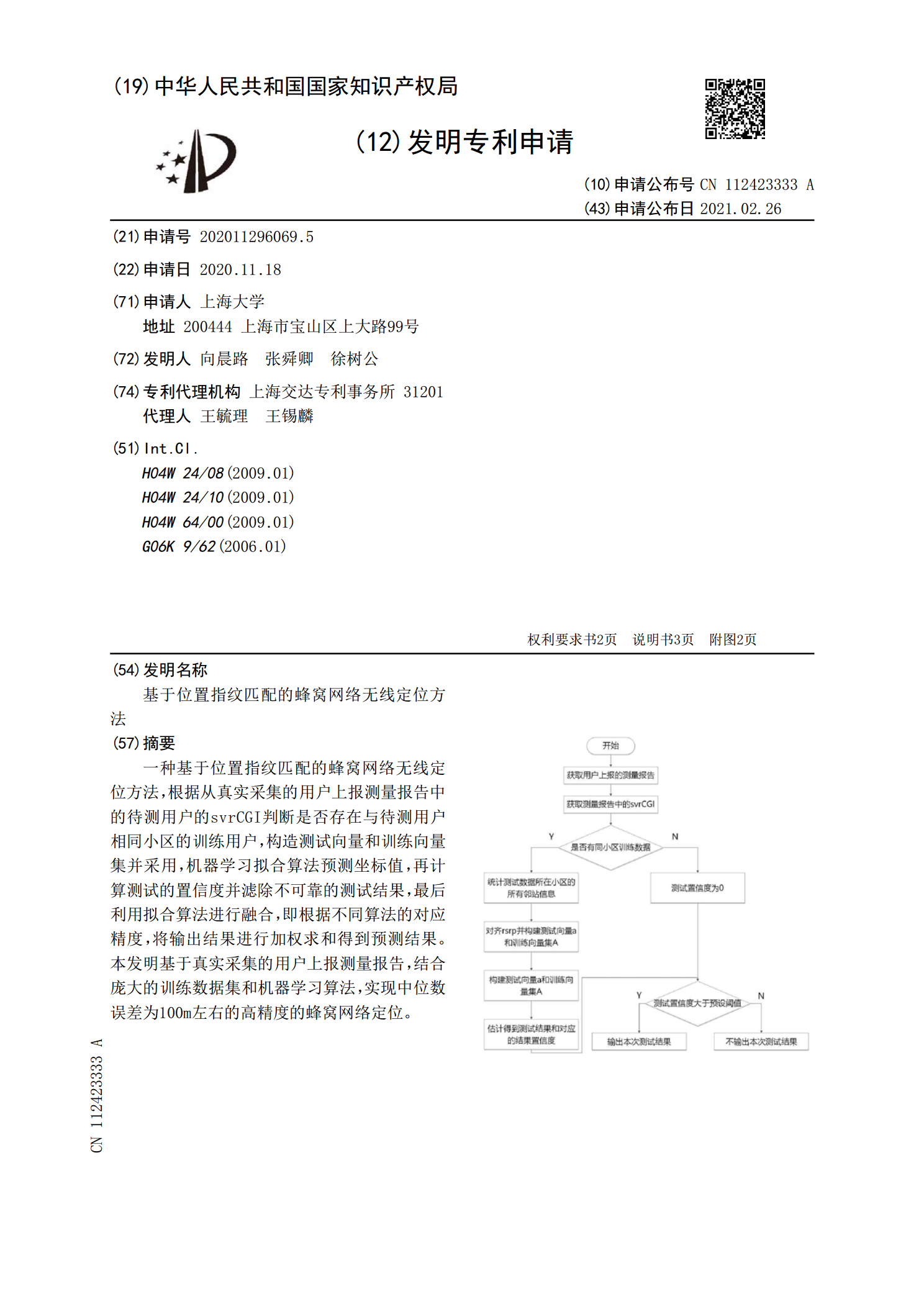
一种基于位置指纹匹配的蜂窝网络无线定位方法,根据从真实采集的用户上报测量报告中的待测用户的svrCGI判断是否存在与待测用户相同小区的训练用户,构造测试向量和训练向量集并采用,机器学习拟合算法预测坐标值,再计算测试的置信度并滤除不可靠的测试结果,最后利用拟合算法进行融合,即根据不同算法的对应精度,将输出结果进行加权求和得到预测结果。本发明基于真实采集的用户上报测量报告,结合庞大的训练数据集和机器学习算法,实现中位数误差为100m左右的高精度的蜂窝网络定位。

WSN中基于指纹匹配的室内定位方法.docx
WSN中基于指纹匹配的室内定位方法随着人们对室内定位精度的要求不断提高,室内定位技术也越来越受到关注。许多室内定位方法已被提出,其中基于无线传感器网络(WirelessSensorNetworks,WSN)的方法备受研究者青睐。本文将探讨一种基于指纹匹配的室内定位方法。一、指纹匹配技术简介指纹匹配技术通过采集与人体指纹有关的生物特征,如皮纹、汗腺等,经过图像处理、特征提取、特征匹配等步骤,计算出两幅或多幅指纹图像之间的相似度,从而实现人体身份识别、指纹比对等应用。在室内定位中,指纹匹配技术同样可以用来识别

基于CSI指纹序列匹配的LTE室内定位方法.docx
基于CSI指纹序列匹配的LTE室内定位方法基于CSI指纹序列匹配的LTE室内定位方法摘要:室内定位一直是无线通信领域的研究热点之一,因为GPS在室内环境下常常存在信号弱、多径效应和阴影效应等问题。CSI(ChannelStateInformation)是一种用于描述信道状态的参数,它可以通过接收端测量获得。本文提出了一种基于CSI指纹序列匹配的LTE室内定位方法,通过收集不同位置的CSI指纹序列,建立指纹数据库,并利用匹配算法进行定位。实验结果表明,本方法在室内环境下具有较高的定位精度和稳定性。关键词:C

基于指纹匹配的WSN室内定位方法研究的开题报告.docx
基于指纹匹配的WSN室内定位方法研究的开题报告一、选题背景随着物联网(IoT)技术的快速发展,无线传感器网络(WSN)在室内定位领域应用越来越广泛。室内定位是一个重要的问题,它可用于电子商务、人员跟踪、智能决策等方面。目前,已有不少的方法被提出来解决这个问题,其中以基于指纹匹配的方法最为常见。本文旨在研究基于指纹匹配的WSN室内定位方法,为实际应用提供一些新的思路。二、研究目的本研究旨在通过分析已有的室内定位方法,结合WSN的特点,提出一种基于指纹匹配的室内定位方法,通过实验验证其可行性和定位精度。三、研