
一种智能交通监控系统.pdf

一吃****书竹


1/8
2/8

3/8

4/8

5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种智能交通监控系统.pdf
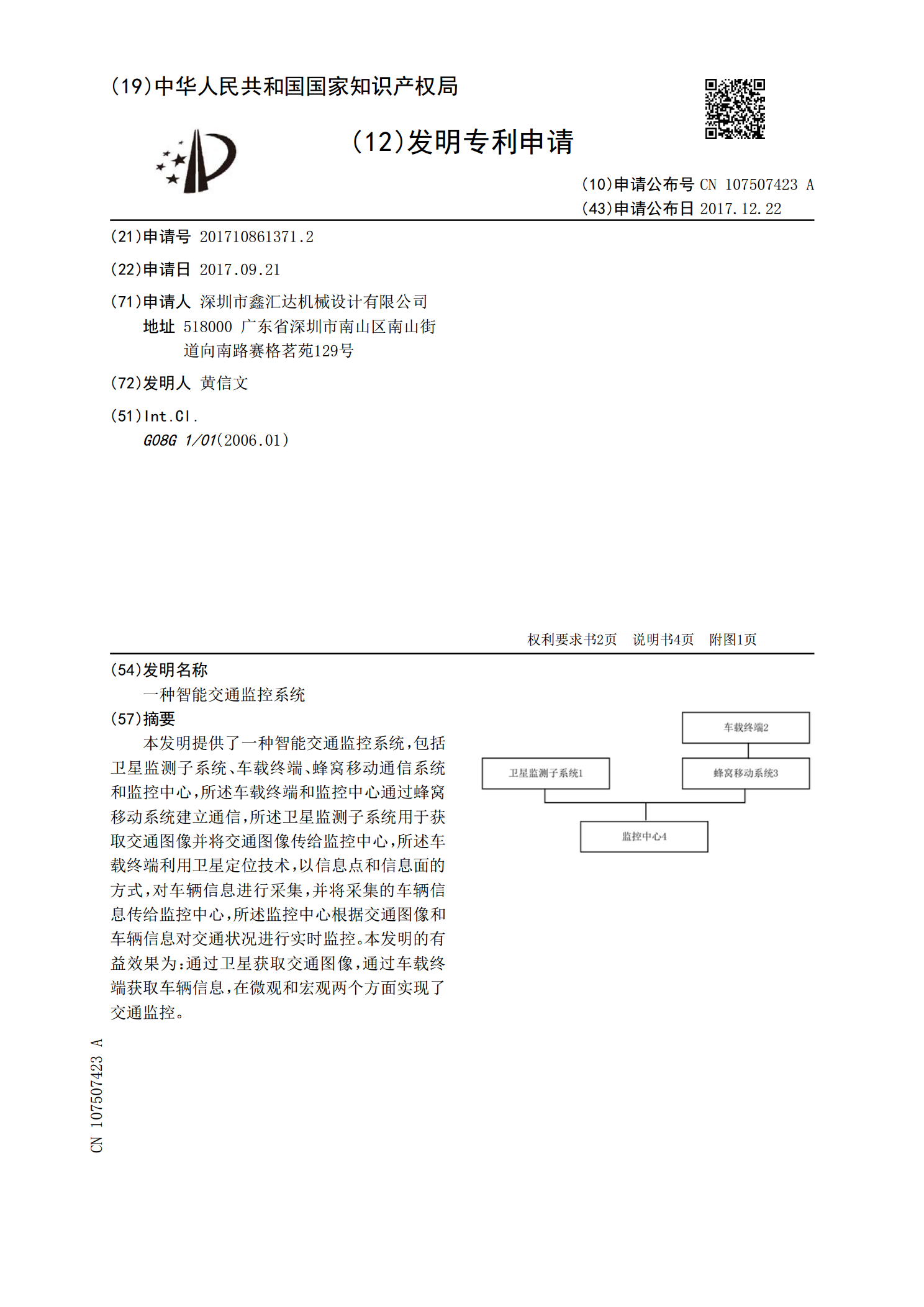
本发明提供了一种智能交通监控系统,包括卫星监测子系统、车载终端、蜂窝移动通信系统和监控中心,所述车载终端和监控中心通过蜂窝移动系统建立通信,所述卫星监测子系统用于获取交通图像并将交通图像传给监控中心,所述车载终端利用卫星定位技术,以信息点和信息面的方式,对车辆信息进行采集,并将采集的车辆信息传给监控中心,所述监控中心根据交通图像和车辆信息对交通状况进行实时监控。本发明的有益效果为:通过卫星获取交通图像,通过车载终端获取车辆信息,在微观和宏观两个方面实现了交通监控。
一种智能交通监控系统.pdf
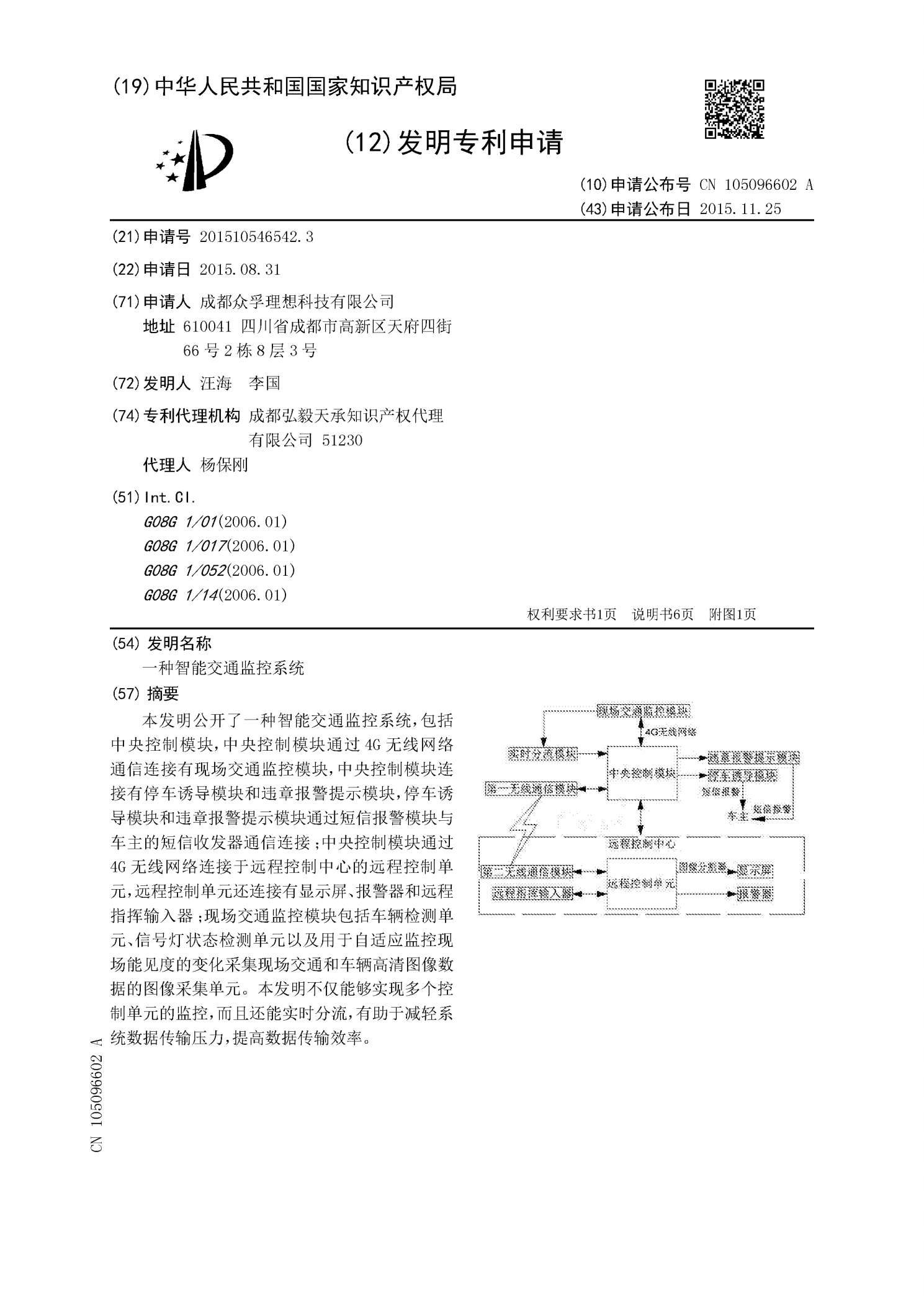
本发明公开了一种智能交通监控系统,包括中央控制模块,中央控制模块通过4G无线网络通信连接有现场交通监控模块,中央控制模块连接有停车诱导模块和违章报警提示模块,停车诱导模块和违章报警提示模块通过短信报警模块与车主的短信收发器通信连接;中央控制模块通过4G无线网络连接于远程控制中心的远程控制单元,远程控制单元还连接有显示屏、报警器和远程指挥输入器;现场交通监控模块包括车辆检测单元、信号灯状态检测单元以及用于自适应监控现场能见度的变化采集现场交通和车辆高清图像数据的图像采集单元。本发明不仅能够实现多个控制单元的

一种智能交通监控系统.pdf
本发明公开了一种智能交通监控系统,包括监控中心、子网控制器、路况检测模块和红绿灯监控器。本发明将交通灯的时间设置为可调,面对不同的车流量,采用不同的时间,以保证车辆在路口的停留时间最少,具体表现为,在车辆较少时,减少红灯等待时间;当车辆增加时,适当增加绿灯的时间,这样可以增强交通灯对不同情况的适应能力,保证路口通畅,实现对交通灯的优化;整个系统自行控制时间变化,改变的时间依据车队长度,车辆的行驶速度得出,避免了不必要的时间浪费,而且保证了车辆通行;而且能够对红绿灯的运行状态做到实时监控,了解红绿灯是否正常

智能交通监控系统.pdf
智能交通监控系统衣、食、住、行,是我们生活上的基本需要。行,是认知环境,是交流根源。在社会经济飞速发展的今天,我们的生活水平不断提高,机动车已经成为人们出行不可或缺的交通工具,交通工具,即我们的“行”。交通工具有利既弊,利,出行方便;弊,事故高发。然而,智能交通监控系统能更好的改善弊,这是交通真正需要的。智能交通监控系统,使道路上的交通信息与交通相关信息尽量完整和实时;交通参与者、交通管理者、交通工具、道路管理设施之间的信息交换实时和高效;控制中心对执行系统的控制更加高效;处理软件系统具备自学习、自适应的
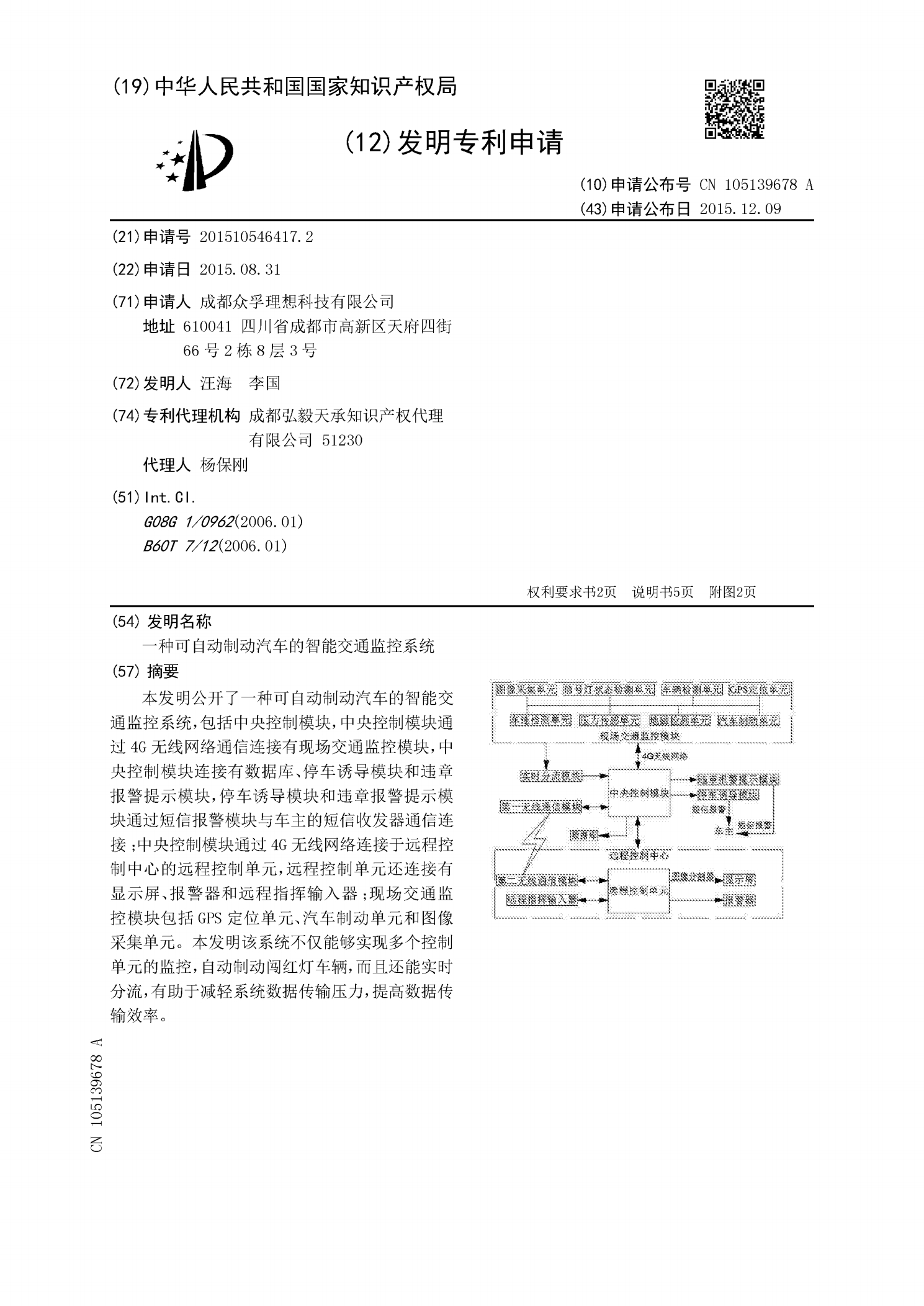
一种可自动制动汽车的智能交通监控系统.pdf
本发明公开了一种可自动制动汽车的智能交通监控系统,包括中央控制模块,中央控制模块通过4G无线网络通信连接有现场交通监控模块,中央控制模块连接有数据库、停车诱导模块和违章报警提示模块,停车诱导模块和违章报警提示模块通过短信报警模块与车主的短信收发器通信连接;中央控制模块通过4G无线网络连接于远程控制中心的远程控制单元,远程控制单元还连接有显示屏、报警器和远程指挥输入器;现场交通监控模块包括GPS定位单元、汽车制动单元和图像采集单元。本发明该系统不仅能够实现多个控制单元的监控,自动制动闯红灯车辆,而且还能实时