
记忆金属驱动基于蜜蜂三足步态的仿生爬壁机器人.pdf

一吃****永贺

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

记忆金属驱动基于蜜蜂三足步态的仿生爬壁机器人.pdf
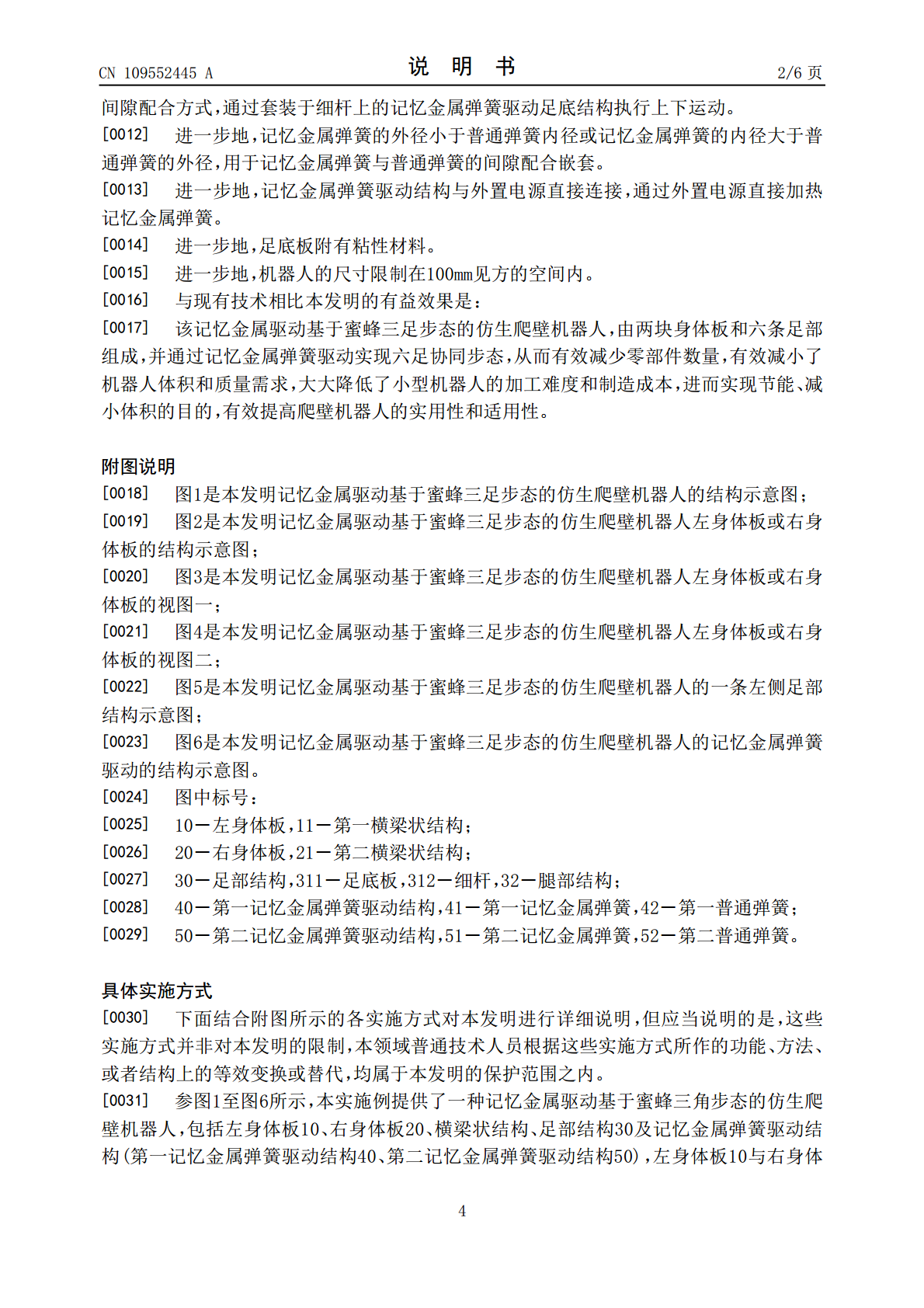
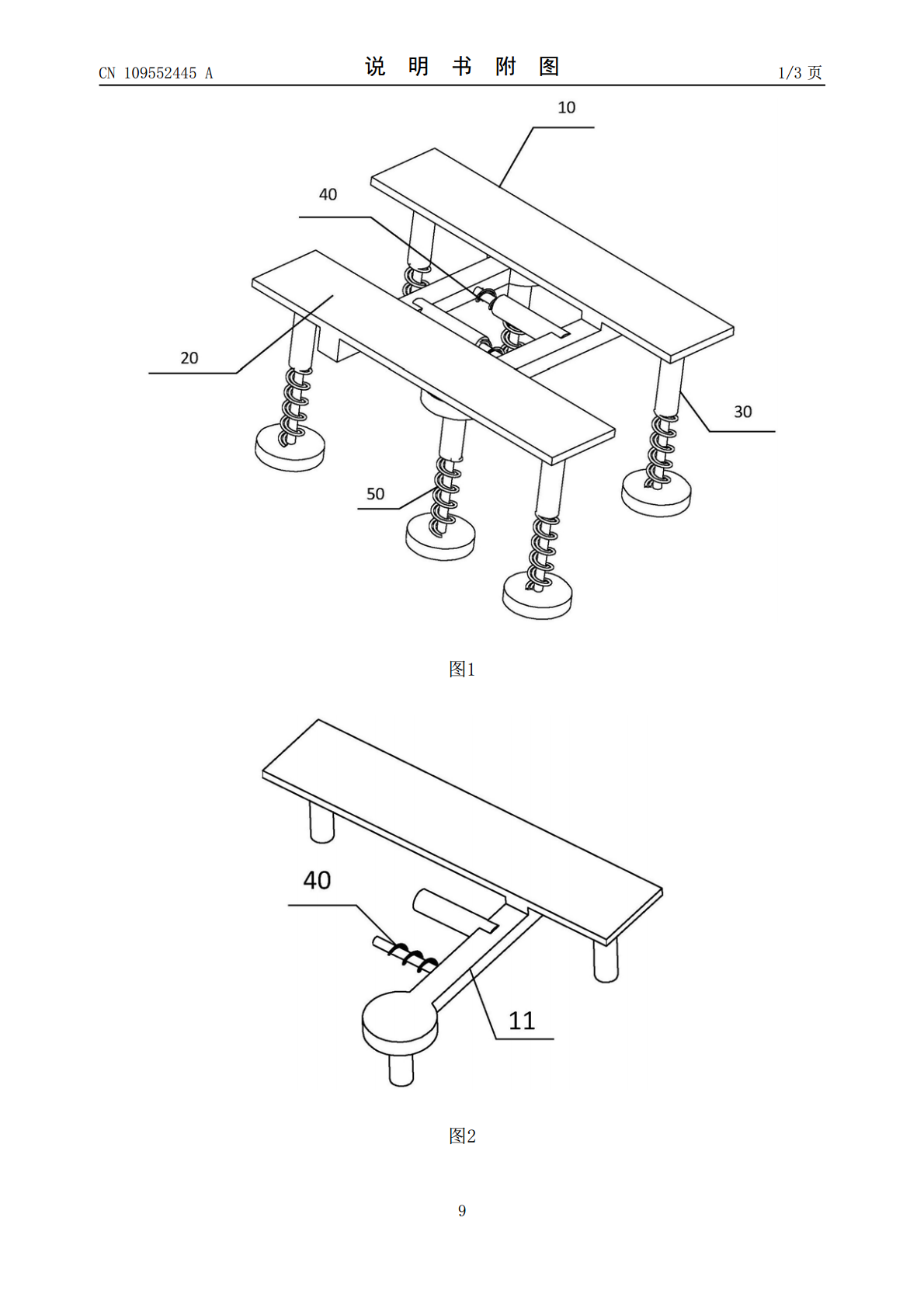
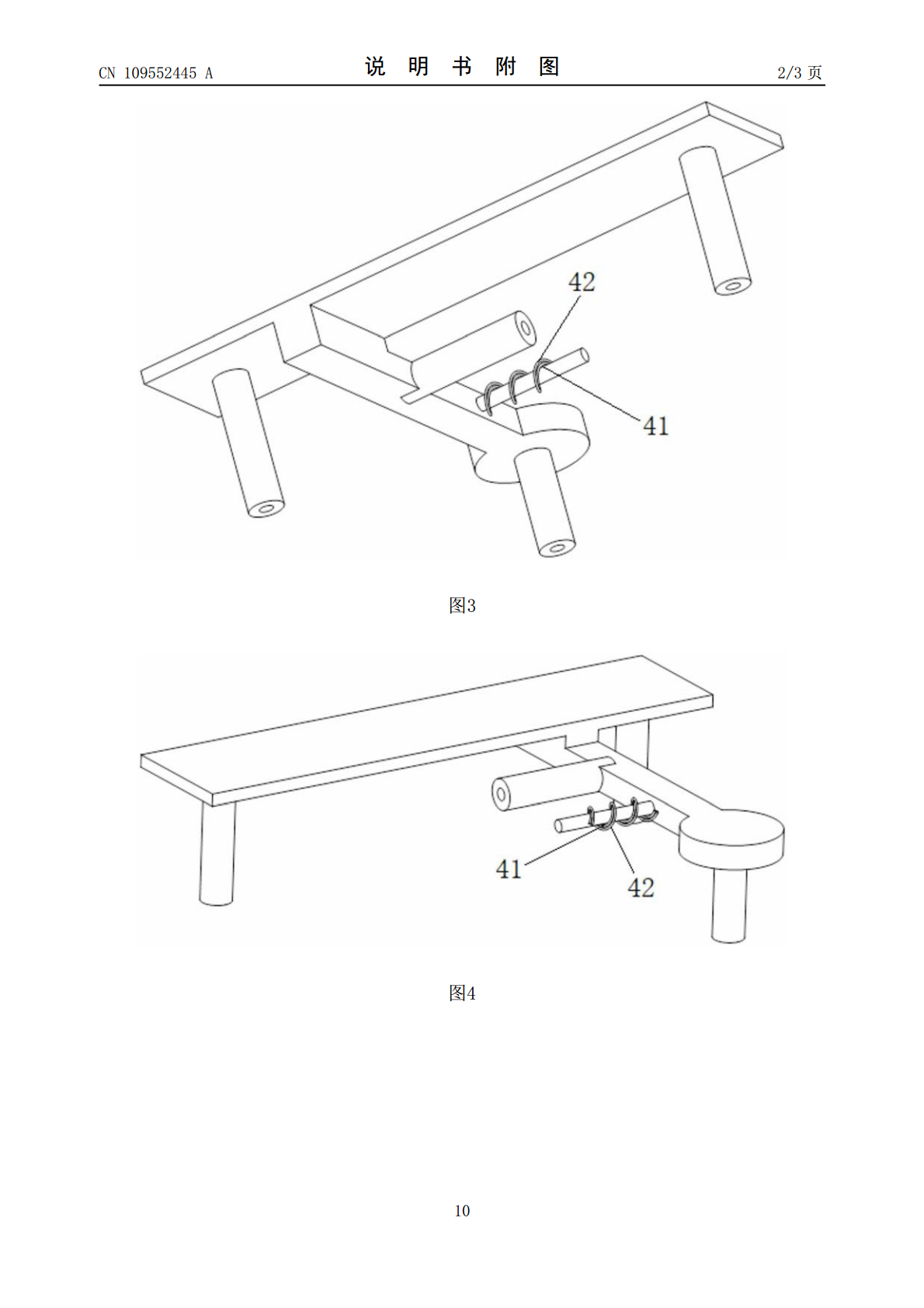
本发明提供了一种记忆金属驱动基于蜜蜂三足步态的仿生爬壁机器人,包括左身体板、右身体板、横梁状结构、足部结构及记忆金属弹簧驱动结构,所述左身体板与右身体板平行布置。本发明由两块身体板和六条足部组成,并通过记忆金属弹簧驱动实现六足协同步态,从而有效减少零部件数量,有效减小了机器人体积和质量需求,大大降低了小型机器人的加工难度和制造成本,进而实现节能、减小体积的目的,有效提高爬壁机器人的实用性和适用性。

基于柔性钩爪足的仿生爬壁机器人的步态设计与足端轨迹规划的任务书.docx
基于柔性钩爪足的仿生爬壁机器人的步态设计与足端轨迹规划的任务书任务书一、任务背景仿生学是一门综合性科学,通过对生命体的结构和功能的研究,以及对自然生态系统的模拟和仿真,实现技术的创新和发展。随着现代科学技术的发展和人们对自然界认知的不断深入,仿生学已经成为一个热门的研究领域。在仿生学中,仿生机器人是一种能够模仿和复制人体或者动物的结构和动作的机器人技术。在工业、医疗、教育、军事、救援等领域中,仿生机器人都有着广泛的应用。爬壁机器人是一种特殊的仿生机器人,具有攀爬在不同类型表面(例如平面、直壁和弯曲的表面)

基于Adams的六足爬壁机器人的步态规划与仿真.docx
基于Adams的六足爬壁机器人的步态规划与仿真引言现代机器人技术在诸多领域都发挥着重要的作用,而六足机器人作为典型的仿生机器人之一,其在机器人探测、矿山勘探、救援等诸多领域具有广泛的应用前景。然而,六足机器人在复杂的地形中移动时需要进行高效、稳定的步态规划,且需要具有适应性,以应对复杂的地形和不同的运动任务。Adams六足机器人是一种设计优秀的高灵敏度、具有强韧性的机器人,适应于复杂地形环境。本文旨在探讨Adams六足爬壁机器人的步态规划与仿真。步态规划步态规划是六足机器人设计中十分重要的一环,它的目的是

基于三角步态的六足爬壁机器人的设计与实现.docx
基于三角步态的六足爬壁机器人的设计与实现摘要:近年来,随着机器人产业的发展,爬壁机器人逐渐被发现可应用于高层建筑清洗、救援、墙体探测等人工成本高昂的领域。然而,在技术和成本的制约下,爬壁机器人仍然不能广泛应用于日常生活中。本文尝试将仿生六足和三角步态等地面机器人研究理论,迁移到爬壁机器人的应用中,成功设计了一种基于三角步态的六足爬壁机器人。样机主体采用轻质合金材料以及PCB板,增加了吸附系统同时配以电路系统、控制系统、传感系统,并优化了机器人的移动步态。目前机器人可实现在垂直于地面的不同材料的光滑表面上进
形状记忆合金驱动的仿生爬壁机器人腿单元及机器人.pdf
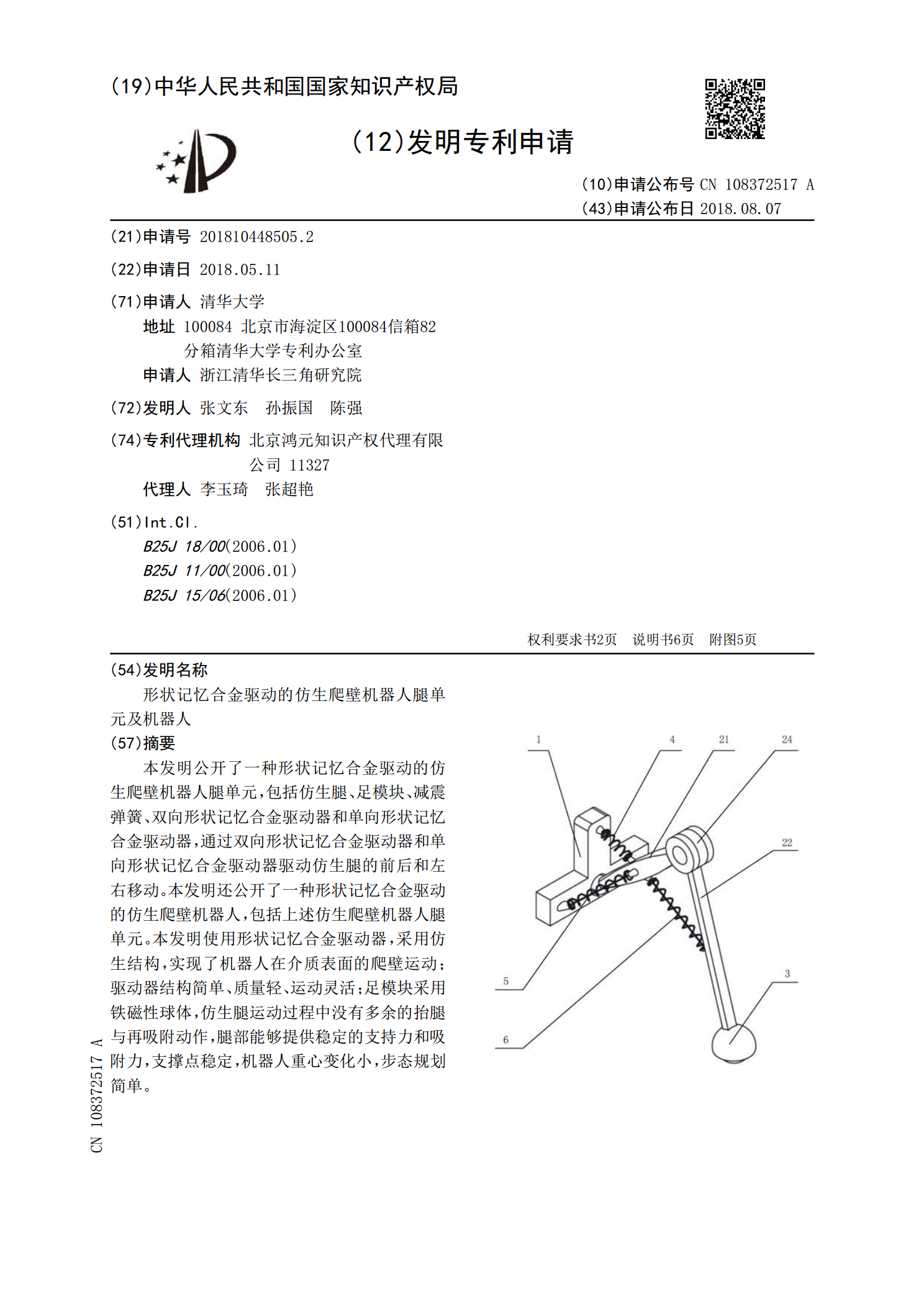
本发明公开了一种形状记忆合金驱动的仿生爬壁机器人腿单元,包括仿生腿、足模块、减震弹簧、双向形状记忆合金驱动器和单向形状记忆合金驱动器,通过双向形状记忆合金驱动器和单向形状记忆合金驱动器驱动仿生腿的前后和左右移动。本发明还公开了一种形状记忆合金驱动的仿生爬壁机器人,包括上述仿生爬壁机器人腿单元。本发明使用形状记忆合金驱动器,采用仿生结构,实现了机器人在介质表面的爬壁运动;驱动器结构简单、质量轻、运动灵活;足模块采用铁磁性球体,仿生腿运动过程中没有多余的抬腿与再吸附动作,腿部能够提供稳定的支持力和吸附力,支撑