
形状记忆合金驱动的仿生爬壁机器人腿单元及机器人.pdf

一吃****书竹

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
形状记忆合金驱动的仿生爬壁机器人腿单元及机器人.pdf
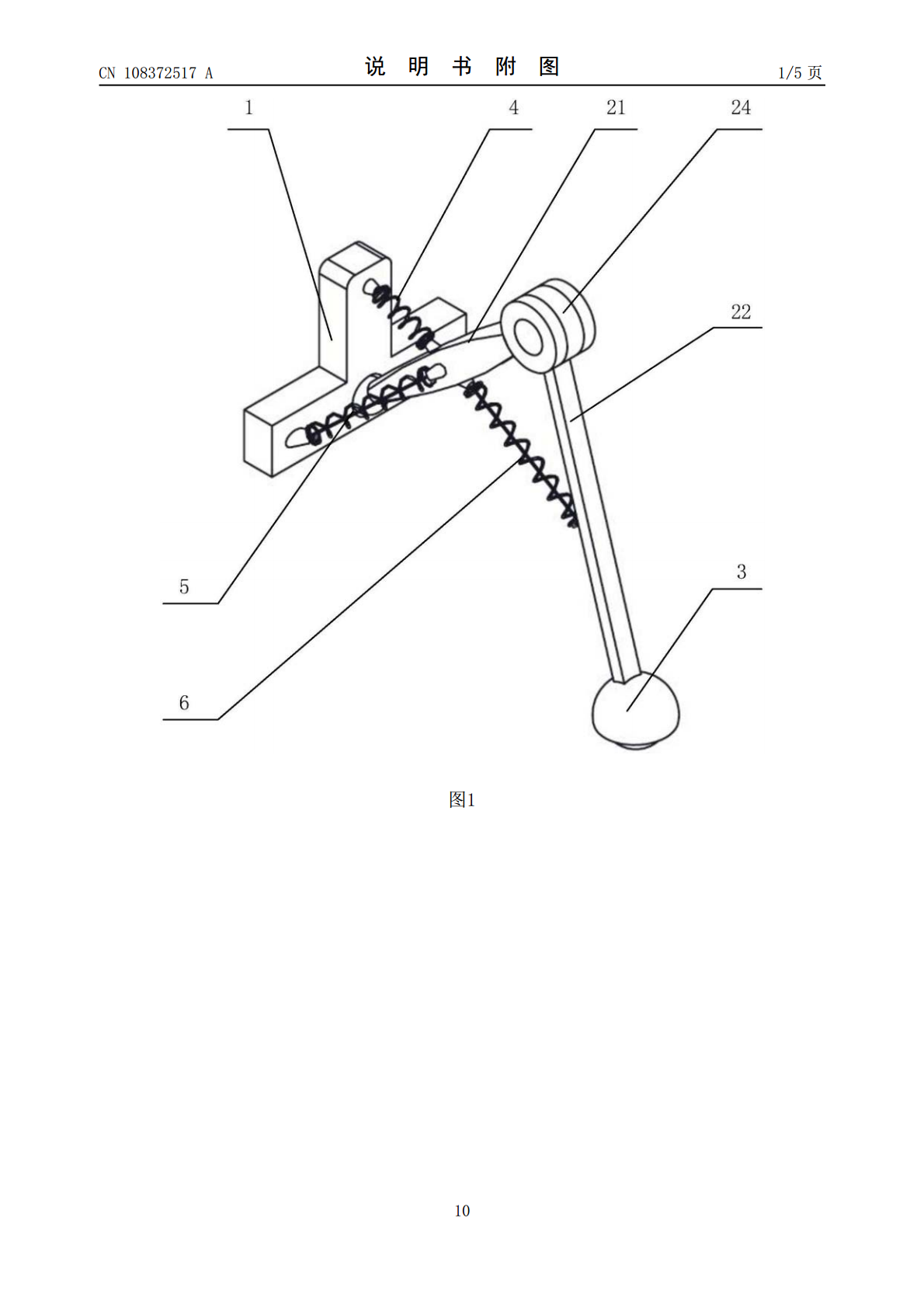
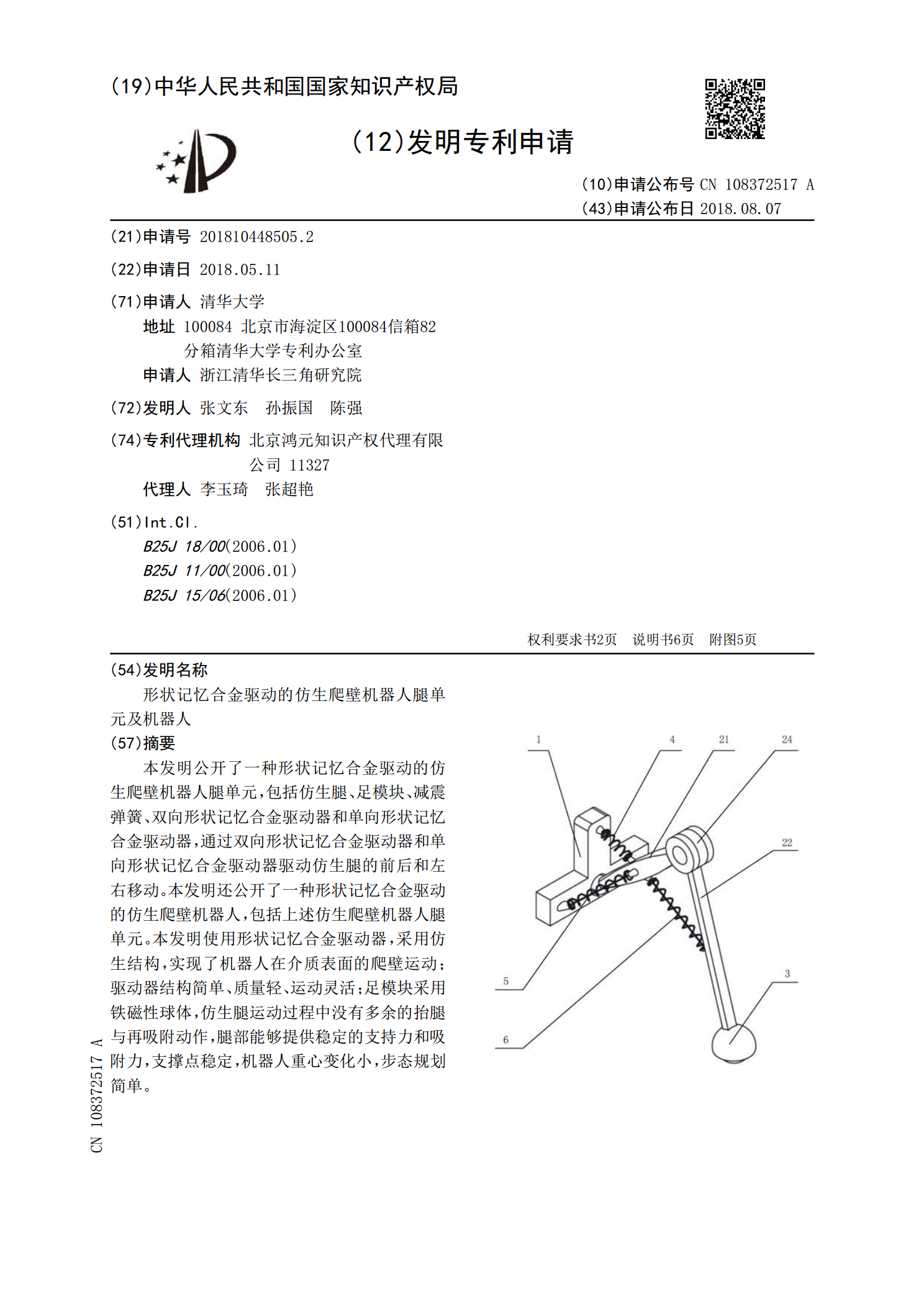
本发明公开了一种形状记忆合金驱动的仿生爬壁机器人腿单元,包括仿生腿、足模块、减震弹簧、双向形状记忆合金驱动器和单向形状记忆合金驱动器,通过双向形状记忆合金驱动器和单向形状记忆合金驱动器驱动仿生腿的前后和左右移动。本发明还公开了一种形状记忆合金驱动的仿生爬壁机器人,包括上述仿生爬壁机器人腿单元。本发明使用形状记忆合金驱动器,采用仿生结构,实现了机器人在介质表面的爬壁运动;驱动器结构简单、质量轻、运动灵活;足模块采用铁磁性球体,仿生腿运动过程中没有多余的抬腿与再吸附动作,腿部能够提供稳定的支持力和吸附力,支撑

记忆金属驱动基于蜜蜂三足步态的仿生爬壁机器人.pdf
本发明提供了一种记忆金属驱动基于蜜蜂三足步态的仿生爬壁机器人,包括左身体板、右身体板、横梁状结构、足部结构及记忆金属弹簧驱动结构,所述左身体板与右身体板平行布置。本发明由两块身体板和六条足部组成,并通过记忆金属弹簧驱动实现六足协同步态,从而有效减少零部件数量,有效减小了机器人体积和质量需求,大大降低了小型机器人的加工难度和制造成本,进而实现节能、减小体积的目的,有效提高爬壁机器人的实用性和适用性。
基于形状记忆合金驱动的管道机器人.pdf
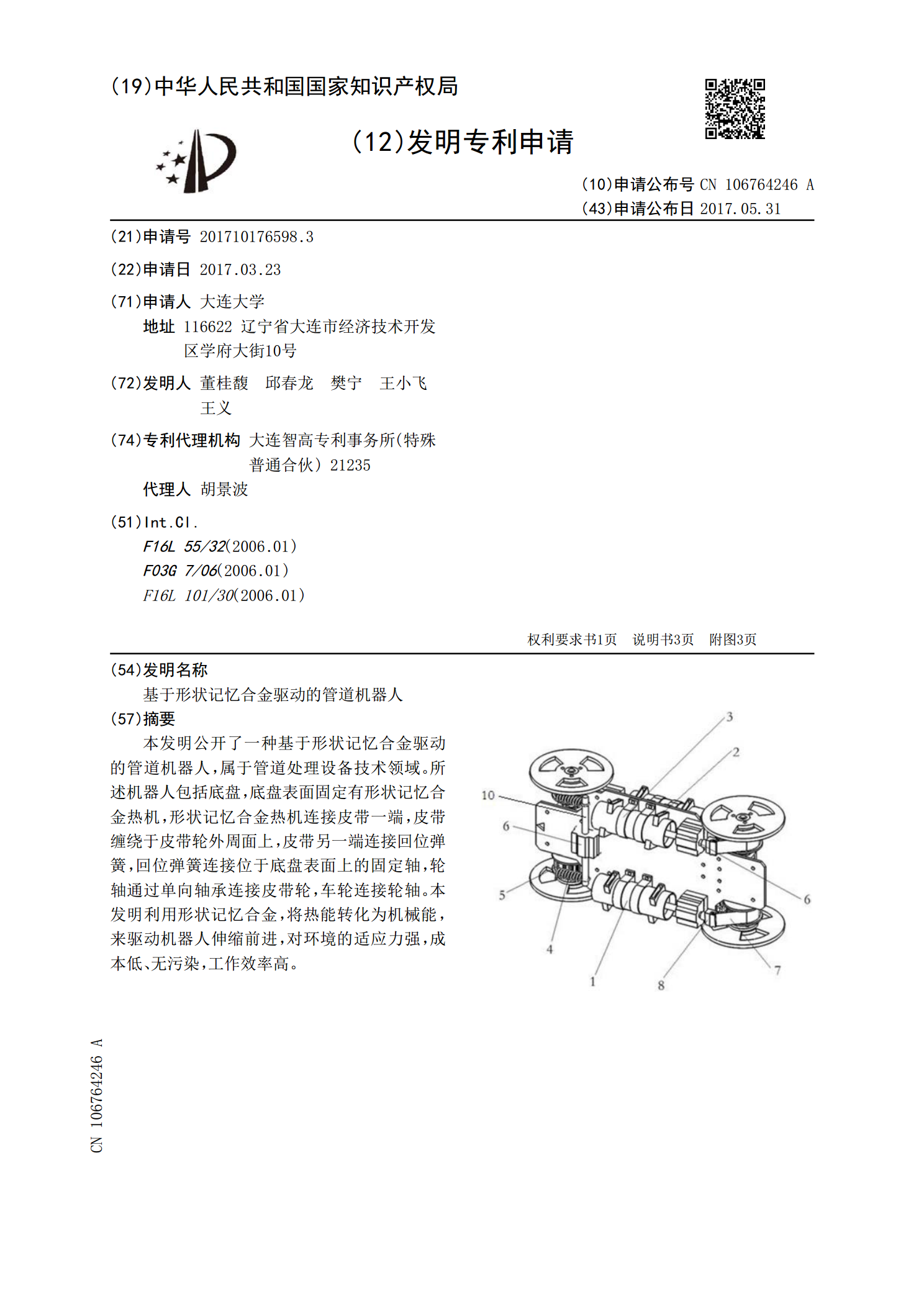
本发明公开了一种基于形状记忆合金驱动的管道机器人,属于管道处理设备技术领域。所述机器人包括底盘,底盘表面固定有形状记忆合金热机,形状记忆合金热机连接皮带一端,皮带缠绕于皮带轮外周面上,皮带另一端连接回位弹簧,回位弹簧连接位于底盘表面上的固定轴,轮轴通过单向轴承连接皮带轮,车轮连接轮轴。本发明利用形状记忆合金,将热能转化为机械能,来驱动机器人伸缩前进,对环境的适应力强,成本低、无污染,工作效率高。
一种电控形状记忆合金丝驱动仿生四足机器人.pdf
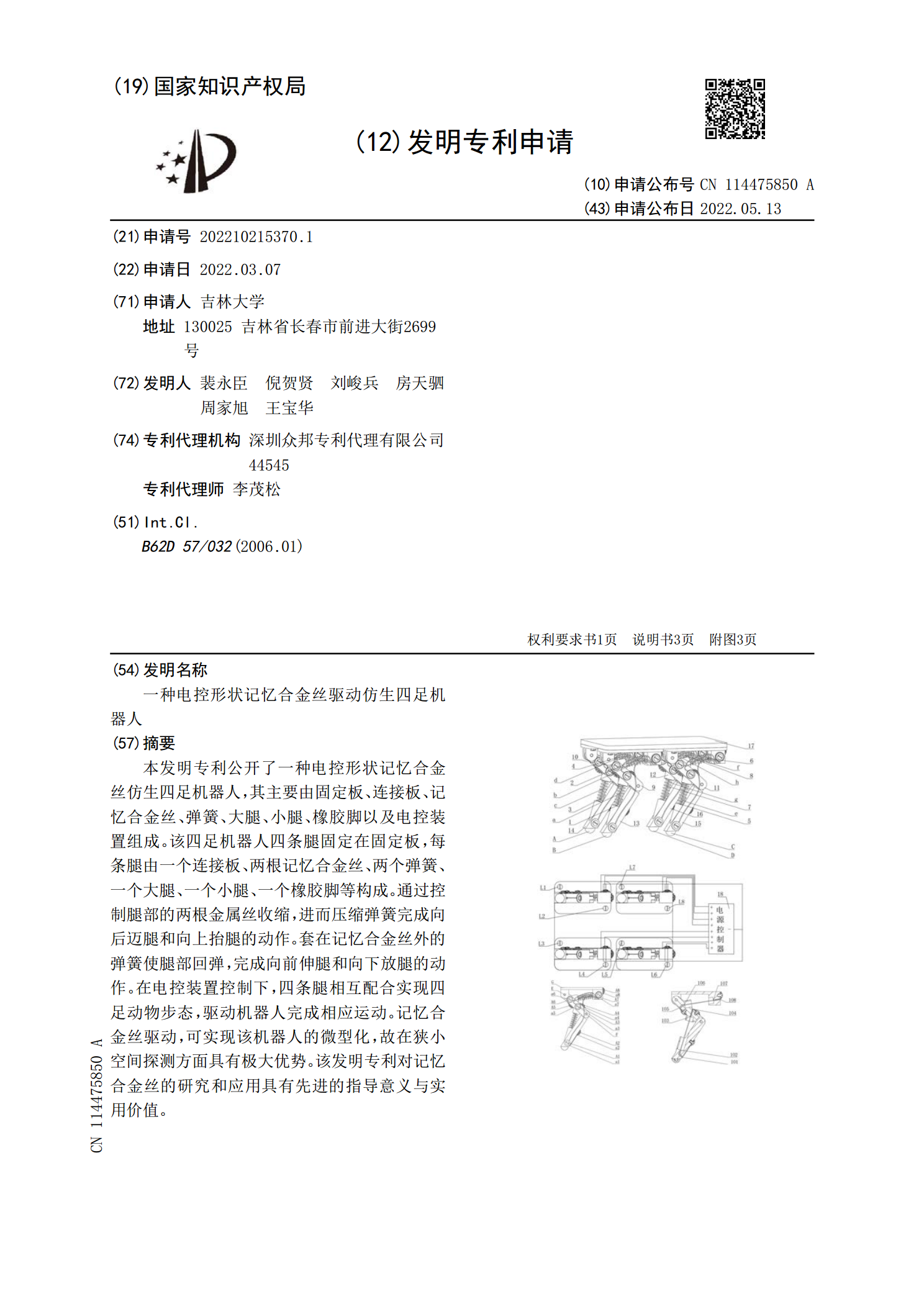
本发明专利公开了一种电控形状记忆合金丝仿生四足机器人,其主要由固定板、连接板、记忆合金丝、弹簧、大腿、小腿、橡胶脚以及电控装置组成。该四足机器人四条腿固定在固定板,每条腿由一个连接板、两根记忆合金丝、两个弹簧、一个大腿、一个小腿、一个橡胶脚等构成。通过控制腿部的两根金属丝收缩,进而压缩弹簧完成向后迈腿和向上抬腿的动作。套在记忆合金丝外的弹簧使腿部回弹,完成向前伸腿和向下放腿的动作。在电控装置控制下,四条腿相互配合实现四足动物步态,驱动机器人完成相应运动。记忆合金丝驱动,可实现该机器人的微型化,故在狭小空间

一种形状记忆合金驱动的爬行机器人.pdf
本发明公开了一种基于形状记忆合金驱动的爬行机器人。机器人足部的轮子由硅胶材料制作而成,利用形状记忆合金集成性高、输出功重比大的特点,将形状记忆合金丝作为机器人的驱动器。提升机器人的运动效率、环境适应能力,为机器人设计了具有防滑作用的棘轮结构,在记忆合金丝的驱动下,机器人的足部能实现较高效率的运动。机器人的前后躯干由具有刚性的压簧连接,在躯干部位的记忆合金丝的作用下,机器人的躯干能实现躯干弯曲、转向等行为。在机器人的躯干部位布置了具有电阻反馈的记忆合金丝,能作为机器人的运动姿态传感器为机器人的闭环控制提供运