
一种蜂巢式运料机器人及其工作方法.pdf

兴朝****45


1/10
2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种蜂巢式运料机器人及其工作方法.pdf
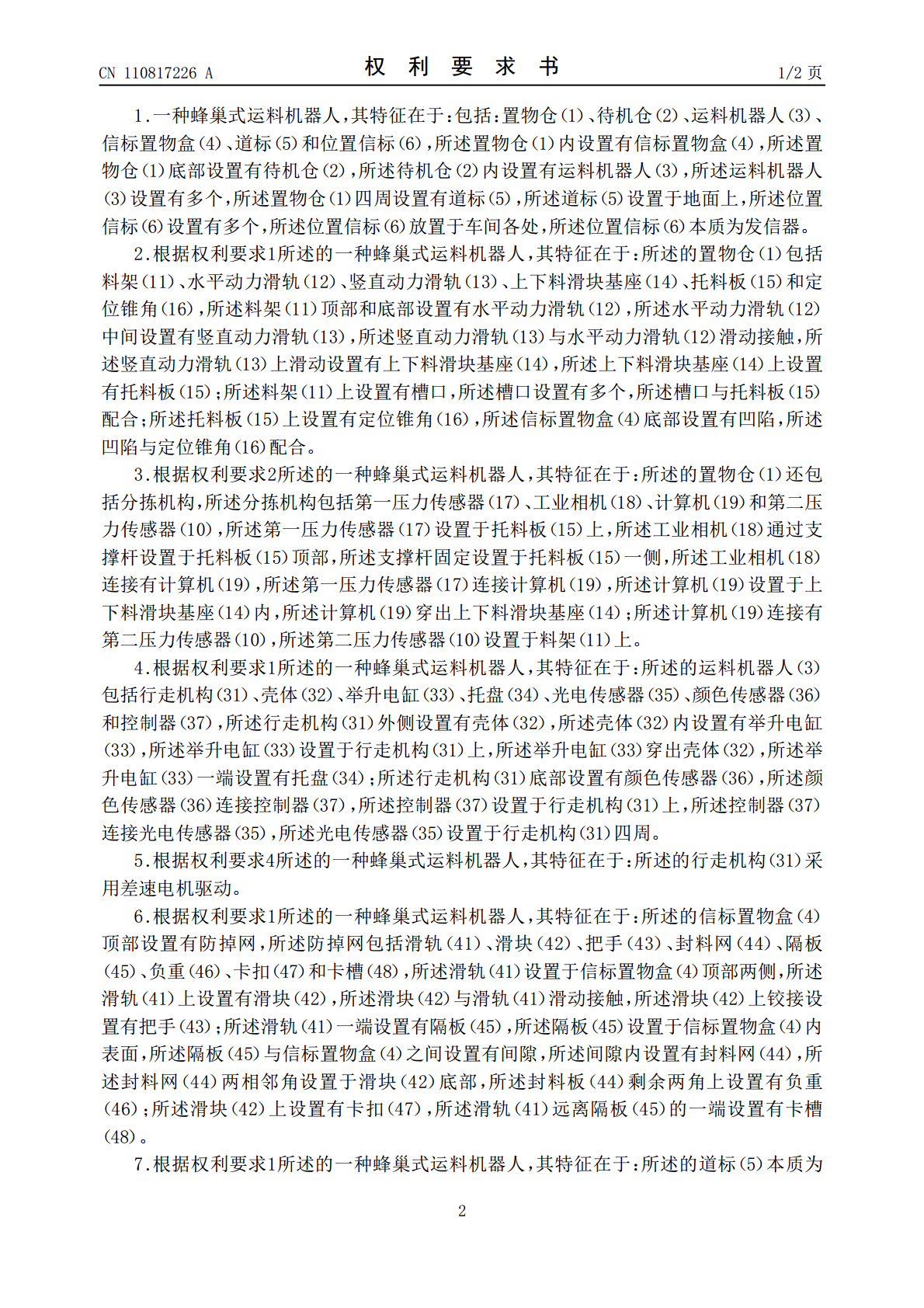
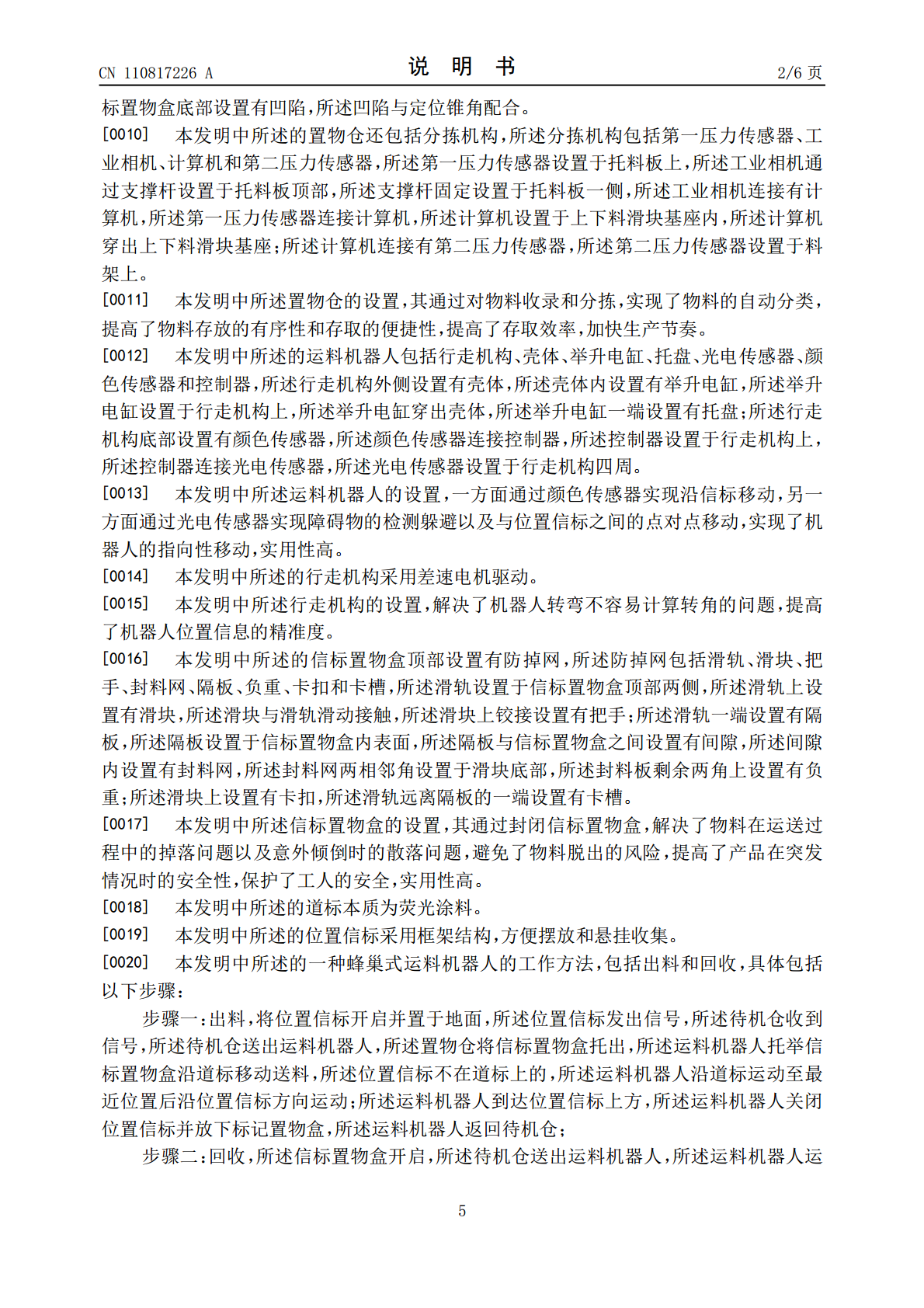
本发明公开了一种蜂巢式运料机器人,包括:置物仓、待机仓、运料机器人、信标置物盒、道标和位置信标,所述置物仓内设置有信标置物盒,所述置物仓底部设置有待机仓,所述待机仓内设置有运料机器人,所述置物仓四周设置有道标,所述道标设置于地面上,所述位置信标放置于车间各处;还公开了一种蜂巢式运料机器人的工作方法;一方面其采用了蜂群模式,简化了单一机器人的逻辑能力、空间感知能力等,结构简单,降低了成本,同时由于建立了机器人之间的联系,可以协同工作,快速弥补出错的任务,工作效率高;另一方面对设备的仓储能力、运料安全性做出了

蜂巢式发酵消化装置及其工作方法.pdf
本发明公开了一种蜂巢式发酵消化装置及其工作方法,包括:一蜂巢式发酵消化仓,包括组成蜂巢结构的n个正六边形筒体;多个溢流口,分别设置在两两筒体相邻的侧壁上,用于连通各个筒体以形成Z形物料流动路径;一进料口,开设于Z形物料流动路径起始端所在筒体的侧壁上;一出料口,开设于Z形物料流动路径终止端所在筒体的侧壁、并靠近顶部的位置;一出渣口,开设于Z形物料流动路径终止端所在筒体的侧壁上,并位于出料口的下方;多个曝气管,每个曝气管为U形,其管体上连通设置有多个曝气支管,各个曝气支管的出口分别通至各个筒体中,用于为各个筒
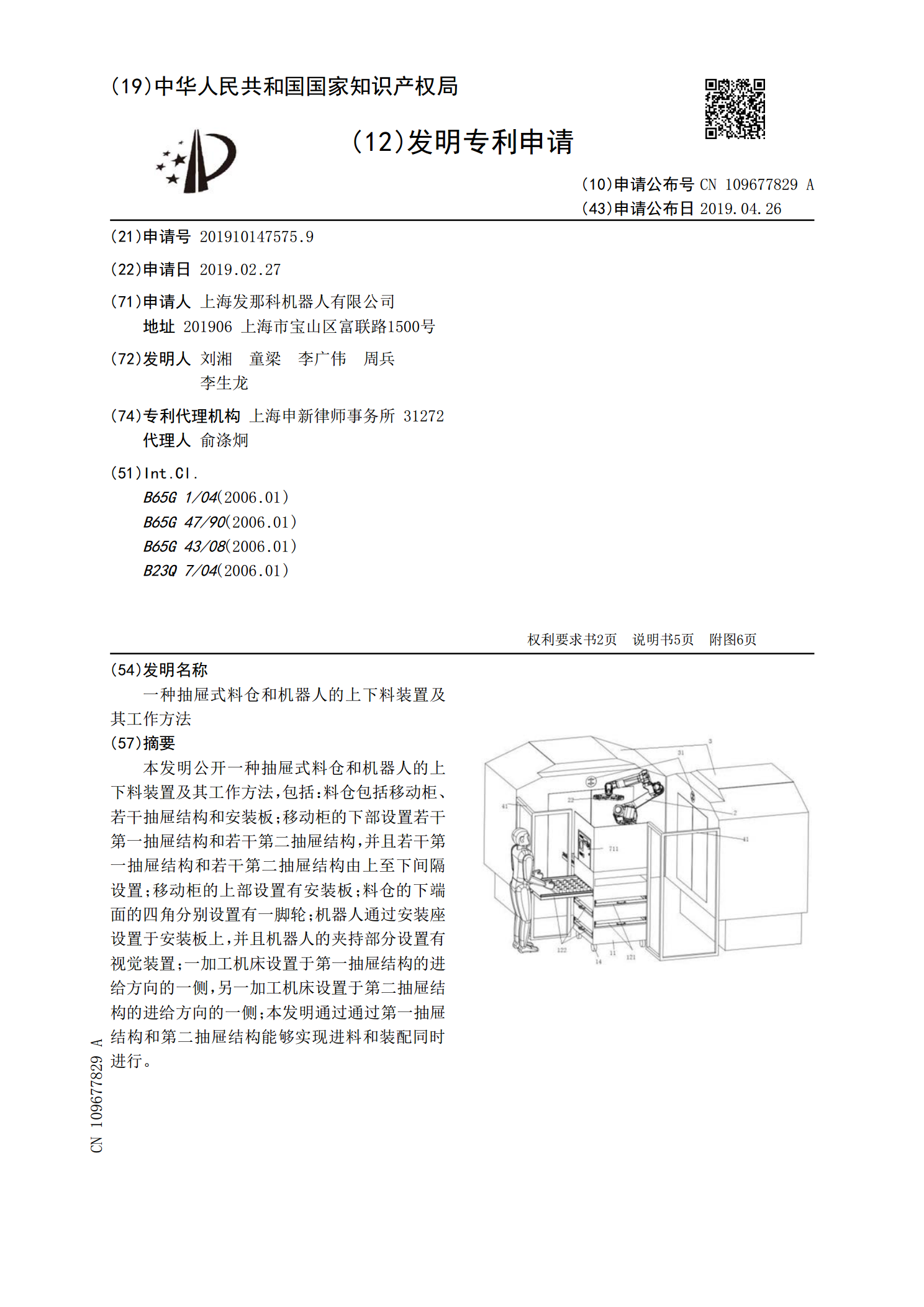
一种抽屉式料仓和机器人的上下料装置及其工作方法.pdf
本发明公开一种抽屉式料仓和机器人的上下料装置及其工作方法,包括:料仓包括移动柜、若干抽屉结构和安装板;移动柜的下部设置若干第一抽屉结构和若干第二抽屉结构,并且若干第一抽屉结构和若干第二抽屉结构由上至下间隔设置;移动柜的上部设置有安装板;料仓的下端面的四角分别设置有一脚轮;机器人通过安装座设置于安装板上,并且机器人的夹持部分设置有视觉装置;一加工机床设置于第一抽屉结构的进给方向的一侧,另一加工机床设置于第二抽屉结构的进给方向的一侧;本发明通过通过第一抽屉结构和第二抽屉结构能够实现进料和装配同时进行。

一种管材运料机器人及其装配方法.pdf
本发明提供一种管材运料机器人,包括机器人本体、用于检测管材位置的检测装置和用于控制机器人运动并移动管材的控制装置;机器人本体至少包括车轮、车架、用于夹紧管道的机械臂和用于驱动车轮及机械臂的驱动装置,机械臂包括与车架同轴转动连接的第一液压伸缩杆、与第一液压伸缩杆折弯连接的第二液压伸缩杆、设于第二液压伸缩杆末端的滚动轴承、设于滚动轴承一端的支撑块、设于支撑块上的电机、及设于电机的输出轴上的用于夹住管材的弧形卡头;本发明的有益效果是:机器人能够自动规划出最高效、最准确的移动运输路径,实现对杂乱堆放的管材进行分类

一种斜井运料装置及其运料方法.pdf
一种斜井运料装置,包括有轨平台、轨道、定滑轮、卷扬机、车档、牵引钢丝绳,所述轨道设置在斜井上,所述有轨平台的下面安装有定滑轮,并通过卷扬机和牵引钢丝绳在所述轨道上移动,所述车档设置在轨道的两端。利用本运料装置及其运料方法制作方便、操作简单、灵活性强,适用于坡度较陡的斜井运输施工,汽车能平稳进出施工区,保证原材料运输及开挖出渣,施工安全方便。