
一种基于北斗定位的杆塔沉降倾斜监测系统及其监测方法.pdf

一条****ee

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于北斗定位的杆塔沉降倾斜监测系统及其监测方法.pdf
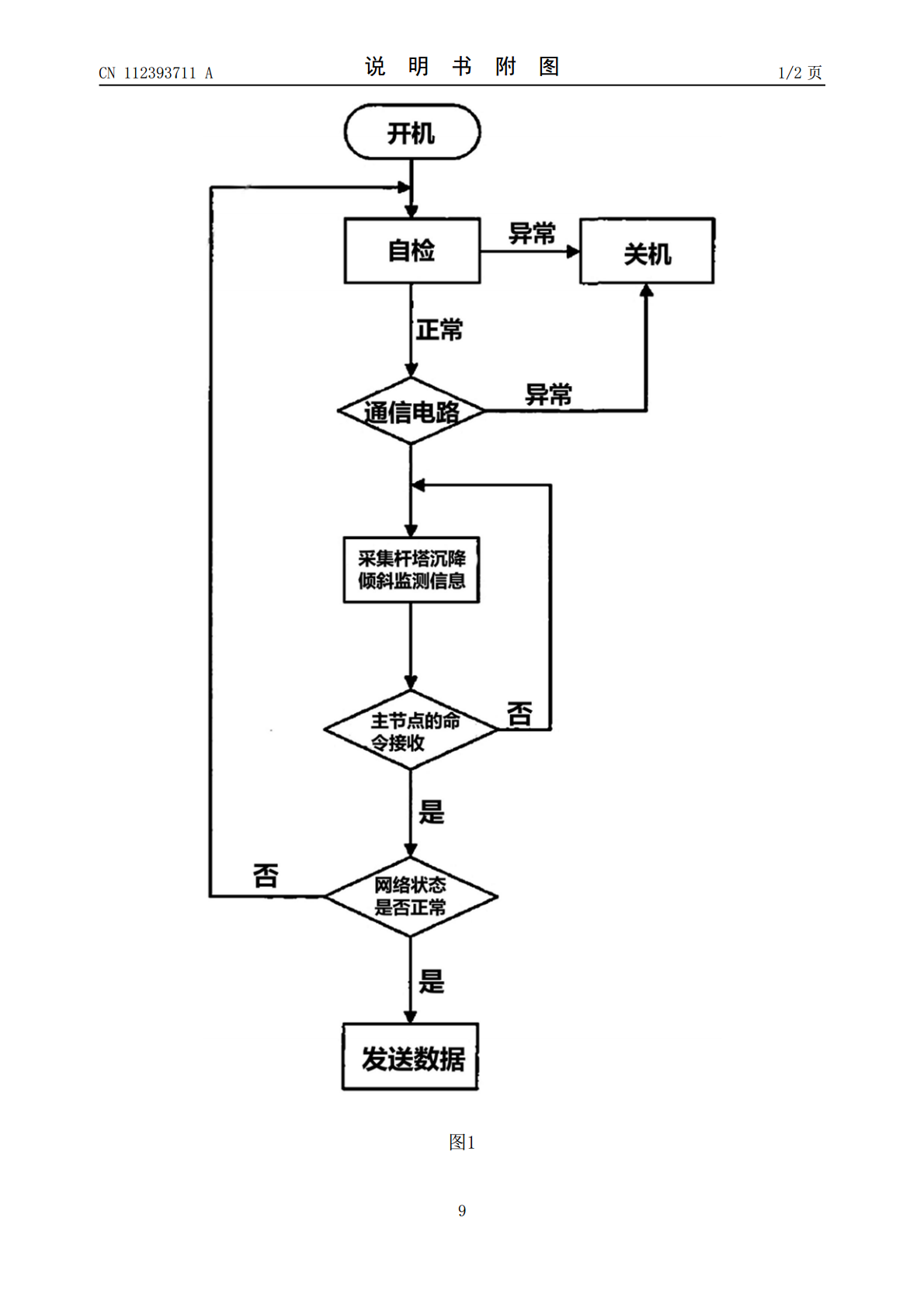
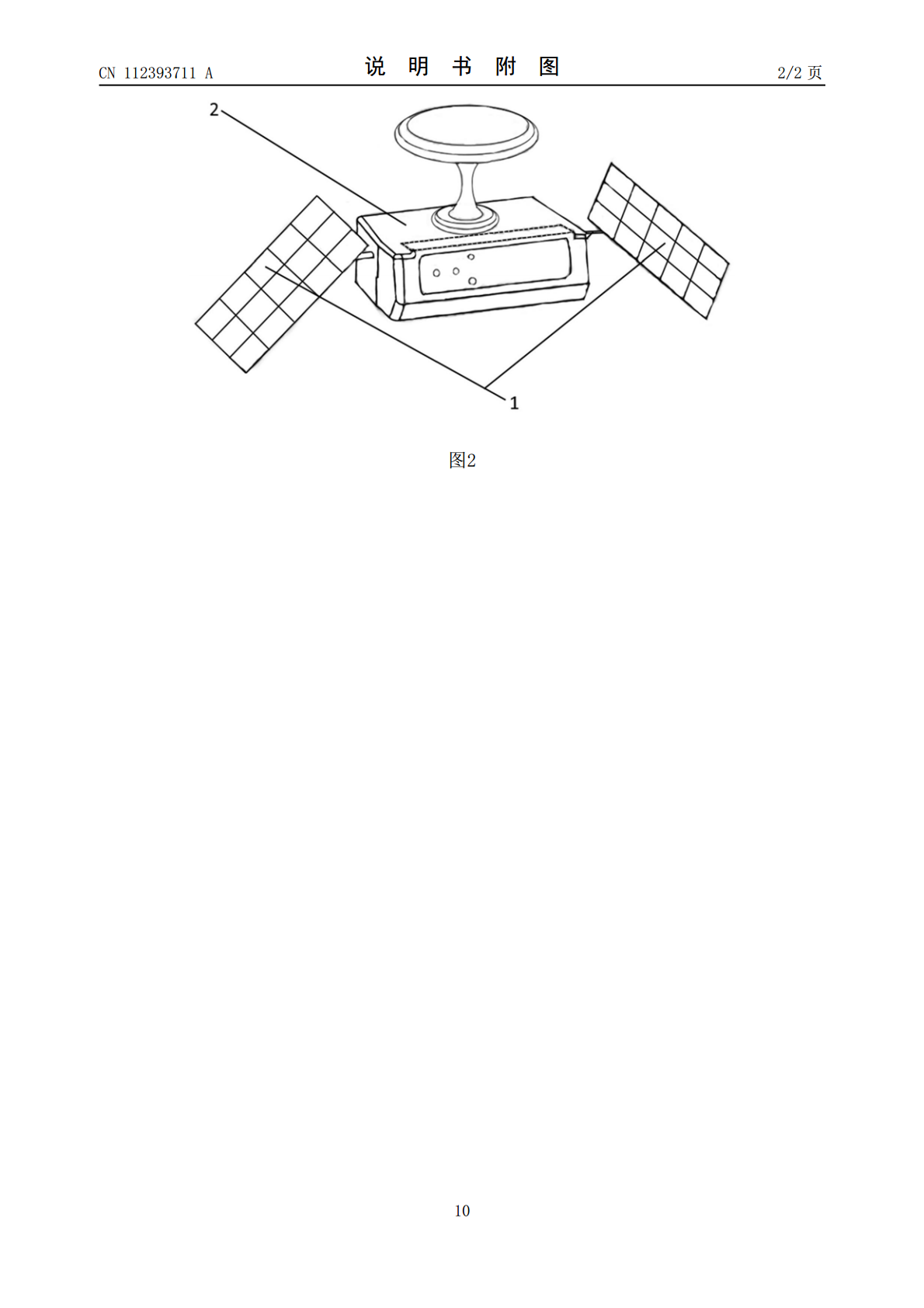
本发明公开了一种基于北斗定位的杆塔沉降倾斜监测系统及其监测方法,包括:监测装置、北斗基准站、公网基站,其中所述监测装置通过北斗终端,获取杆塔水平垂直位移和倾斜角度数据;所述北斗基准站用于高精度定位校核;所述公网基站通过无线调制解调器,对移动信号的接收和发送进行处理,通过在杆塔区域内,设置多个公网基站和监测系统中的北斗定位系统相互结合组成一个蜂窝状的网络,在根据接收时刻和发射时刻之差求得信号在回路中的总传播时延,再通过两个坐标的转换实现位置关系之间一一对应;本发明通过北斗载波相位差分测量与姿态测量,监测输电

一种基于北斗定位系统的沉降监测路灯.pdf
本发明公开了一种基于北斗定位系统的沉降监测路灯,包括固定座,所述固定座的一侧固定设有监测箱,所述监测箱远离固定座的一侧固定连接有斜支撑杆,所述斜支撑杆远离监测箱的一端固定连接有灯座,所述灯座的底部设有路灯,且灯座的底部位于路灯外侧设有一圈灯罩,所述斜支撑杆的上方固定连接有竖杆,且竖杆的顶部转动连接有转动杆,所述转动杆的顶部设有光伏发电板,本发明结构简单,使用方便,通过北斗系统定位实现沉降监测,省时省力,自动化程度高,可以通过光伏发电为自身供电,并可以作为路灯自动提供照明,节能环保,另外外部设有监测点可以做
一种杆塔位移沉降监测方法及系统.pdf
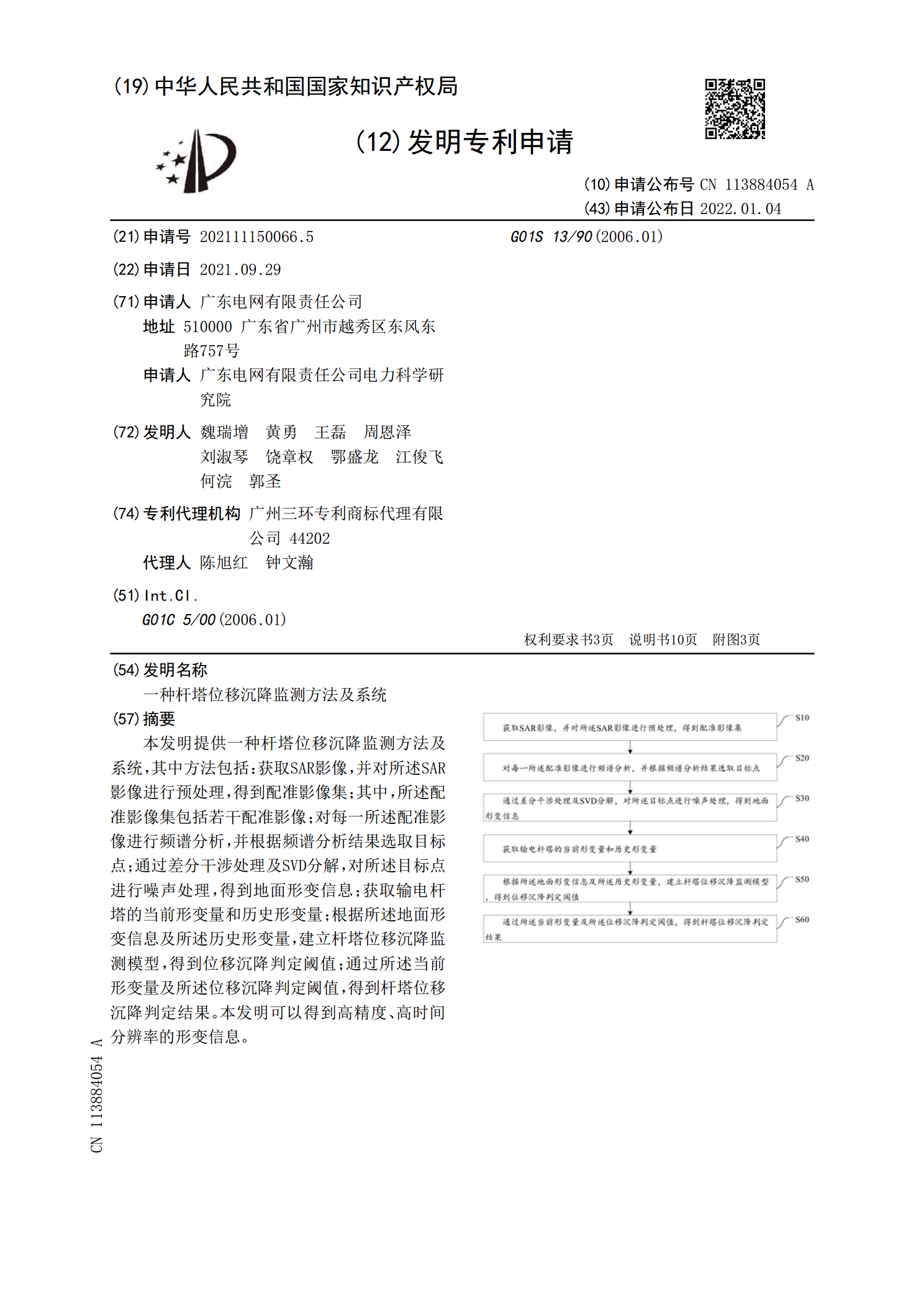
本发明提供一种杆塔位移沉降监测方法及系统,其中方法包括:获取SAR影像,并对所述SAR影像进行预处理,得到配准影像集;其中,所述配准影像集包括若干配准影像;对每一所述配准影像进行频谱分析,并根据频谱分析结果选取目标点;通过差分干涉处理及SVD分解,对所述目标点进行噪声处理,得到地面形变信息;获取输电杆塔的当前形变量和历史形变量;根据所述地面形变信息及所述历史形变量,建立杆塔位移沉降监测模型,得到位移沉降判定阈值;通过所述当前形变量及所述位移沉降判定阈值,得到杆塔位移沉降判定结果。本发明可以得到高精度、高时
一种杆塔基础沉降监测用沉降计及沉降监测系统.pdf
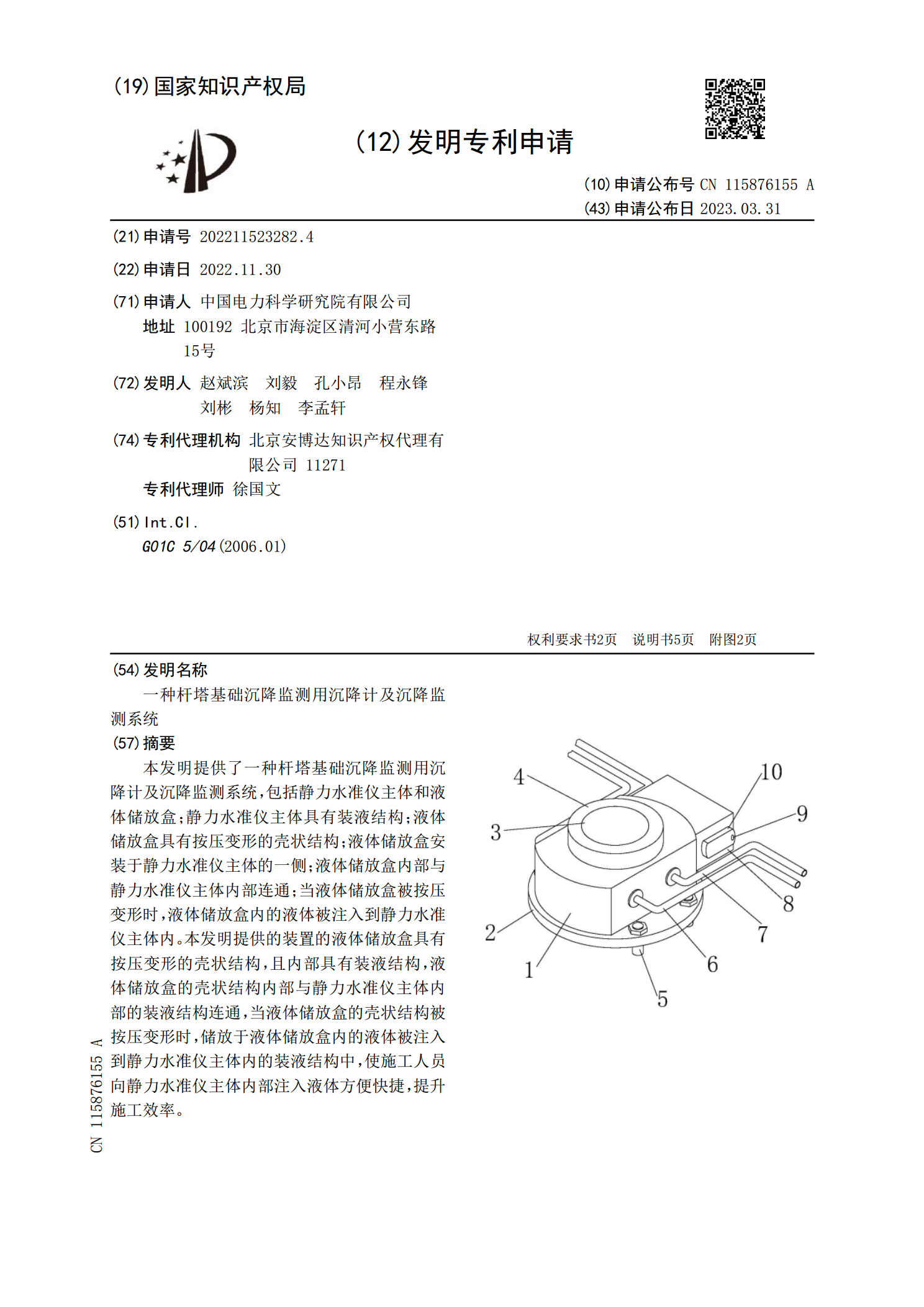
本发明提供了一种杆塔基础沉降监测用沉降计及沉降监测系统,包括静力水准仪主体和液体储放盒;静力水准仪主体具有装液结构;液体储放盒具有按压变形的壳状结构;液体储放盒安装于静力水准仪主体的一侧;液体储放盒内部与静力水准仪主体内部连通;当液体储放盒被按压变形时,液体储放盒内的液体被注入到静力水准仪主体内。本发明提供的装置的液体储放盒具有按压变形的壳状结构,且内部具有装液结构,液体储放盒的壳状结构内部与静力水准仪主体内部的装液结构连通,当液体储放盒的壳状结构被按压变形时,储放于液体储放盒内的液体被注入到静力水准仪主

基于北斗差分定位的变压器杆塔监测预警系统研究.docx
基于北斗差分定位的变压器杆塔监测预警系统研究基于北斗差分定位的变压器杆塔监测预警系统研究摘要:随着电力行业的快速发展,变压器杆塔的安全监测成为一个重要的问题。本文基于北斗差分定位技术,针对变压器杆塔的监测预警需求,设计和实现了一个基于北斗差分定位的变压器杆塔监测预警系统。该系统可以实时监测变压器杆塔的位置、倾斜角度和环境温度等参数,并提供实时预警和远程监控功能。实验结果表明,该系统可以准确地监测变压器杆塔的状态,并及时发出预警信号,提高了变压器杆塔的安全性和可靠性。关键词:北斗差分定位;变压器杆塔;监测预