
一种液压顶升重载搬运机器人.pdf

依波****bc


1/9

2/9
3/9

4/9

5/9

6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种液压顶升重载搬运机器人.pdf
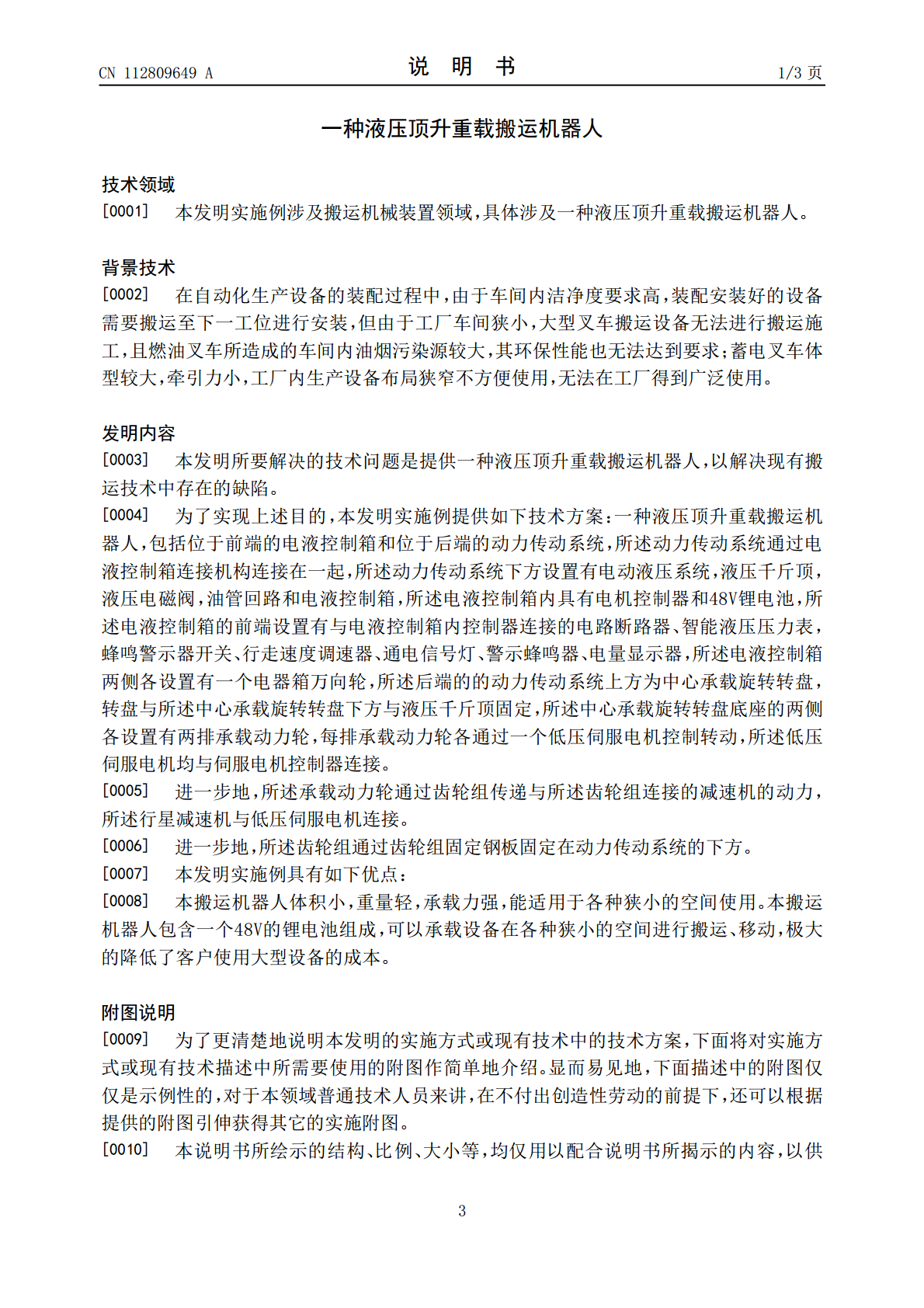
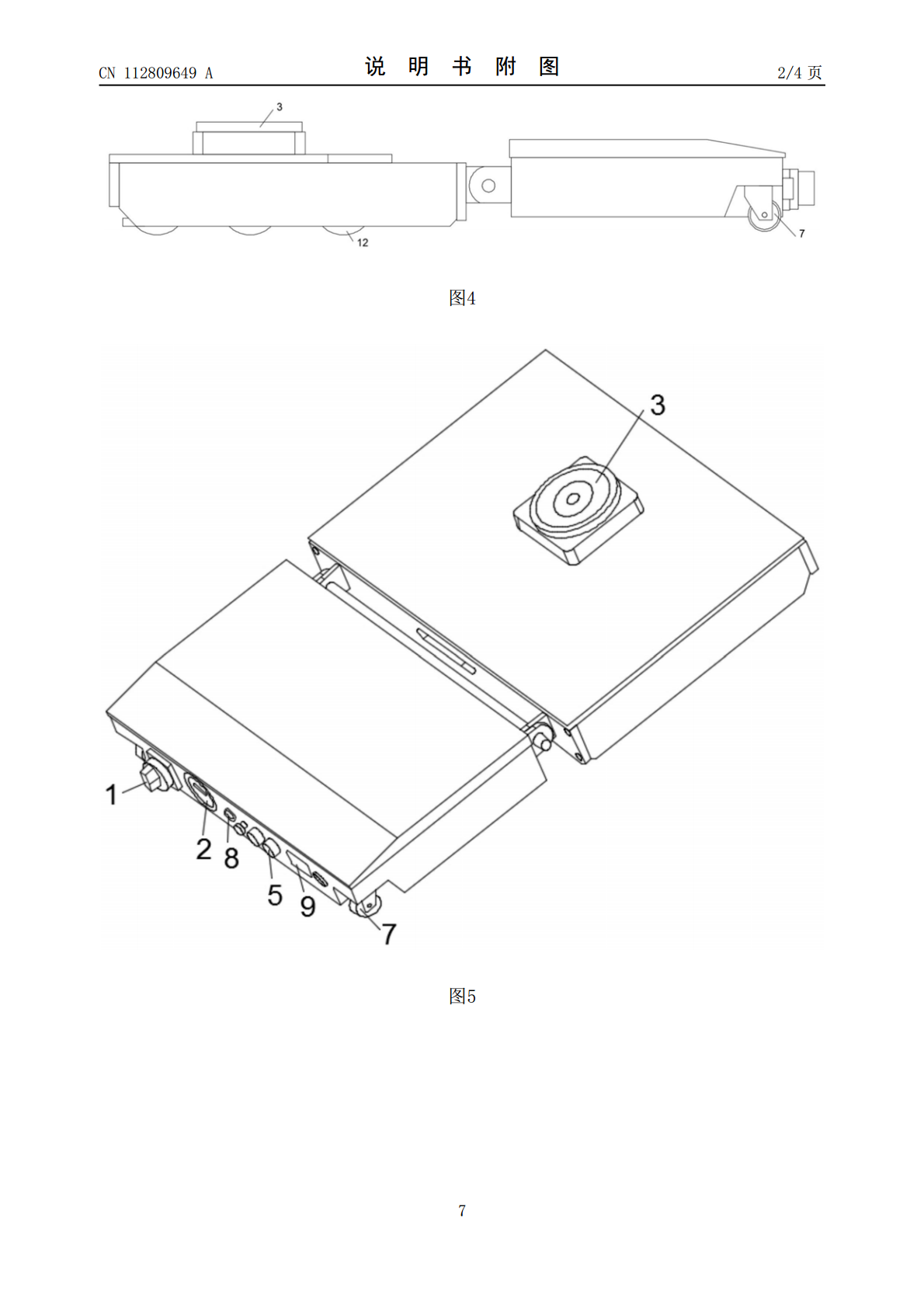
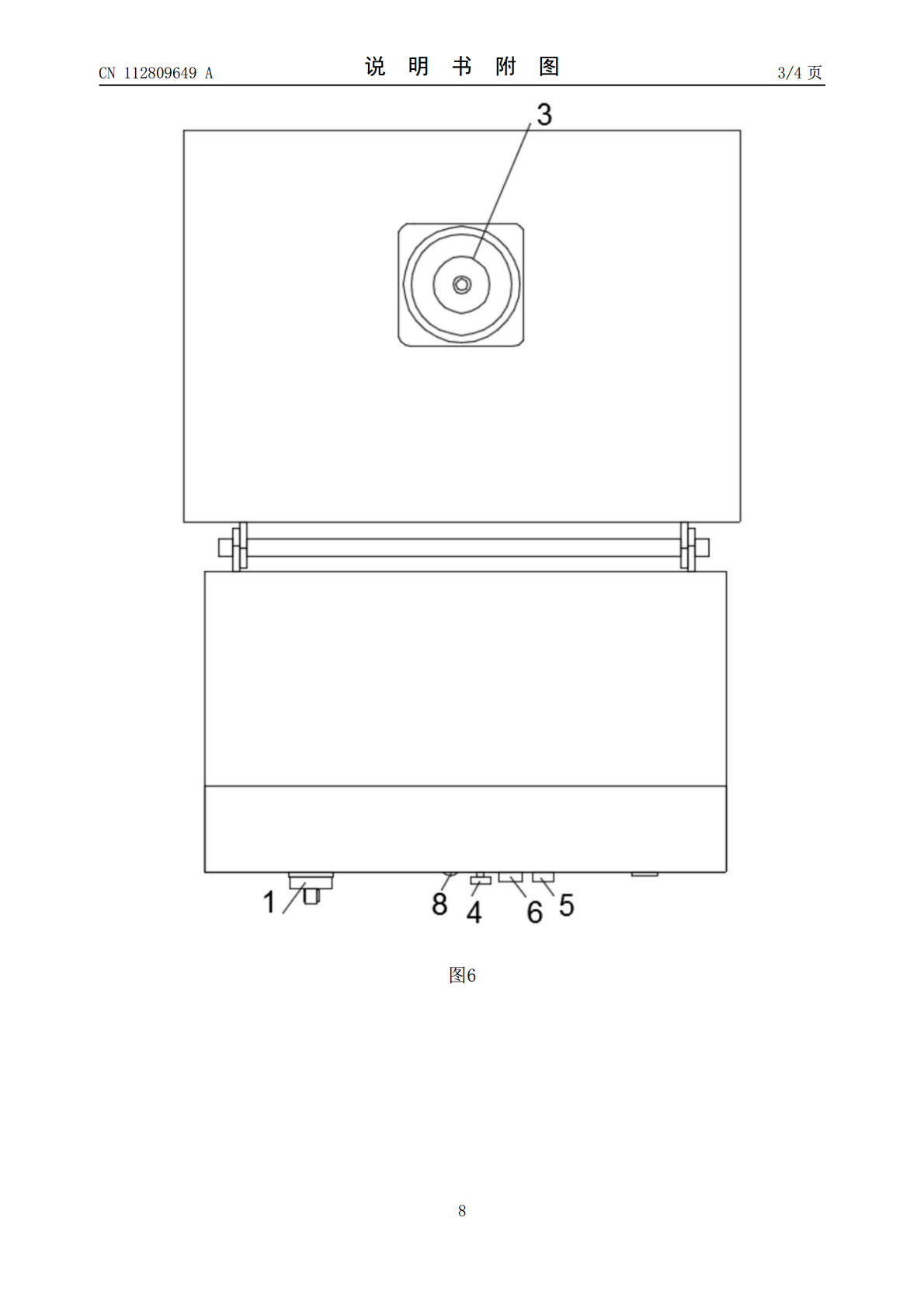
本发明公开了一种液压顶升重载搬运机器人,具体涉及搬运机械装置领域,包括位于前端的电液控制箱和位于后端的动力传动系统,所述动力传动系统通过电液控制箱连接机构连接在一起,所述动力传动系统下方设置有电动液压系统,液压千斤顶,液压电磁阀,油管回路和电液控制箱,所述电液控制箱内具有电机控制器和48V锂电池,所述电液控制箱的前端设置有与电液控制箱内控制器连接的电路断路器、智能液压压力表,蜂鸣警示器开关、行走速度调速器。本搬运机器人体积小,重量轻,承载力强,能适用于各种狭小的空间使用。本搬运机器人包含一个48V/60A

一种重载大尺寸液压举升搬运装置.pdf
本发明公开了一种重载大尺寸液压举升搬运装置,它包括承载框架,该框架两侧设有中空的滑轨,前端设置有底板,靠近底板一侧的两根滑轨之间布置有顶板;所述底板上端安装有驱动机构,下端安装有前导向轮,所述滑轨内安装有联动机构,顶部末端固接有三角铁。该装置采用液压驱动和多级杠杆牵连运动的原理制成的联动机构来分别进行货物的前后举升,举升过程耗时短,效率高,而使得大尺寸规则货柜或停放架等货物的搬运变得更加容易,不会耗费大量的人力物力;同时还具备举升结束后的自动下降固定,防止货物滑落。

一种重载搬运装配移动机器人.pdf
本发明公开了一种重载搬运装配移动机器人,包括麦克纳姆轮式全方位移动平台,控制柜,升降机构,Stewart平台,夹持装置;所述控制柜与麦克纳姆轮式全方位移动平台连接,所述升降机构与麦克纳姆轮式全方位移动平台固定连接,所述Stewart平台固定安装在升降机构上面,所述夹持装置固定安装在Stewart平台上。麦克纳姆轮式全方位移动平台具有二维平面全方位移动功能,且回转半径为零,高速重载,Stewart平台具有空间六个自由度,因此所述重载搬运装配移动机器人适合在狭窄空间内进行搬运、装配等作业。

一种结构紧凑的顶升搬运机器人及其搬运方法.pdf
本发明公开了一种结构紧凑的顶升搬运机器人及其搬运方法,包括主通道位行走机构、子通道行走机构和换向主体,所述主通道行走机构通过换向主体设置在子通道行走机构上,且所述主通道行走机构通过换向主体相对于子通道行走机构在竖向方向上升降调节设置,所述换向主体包括主动齿轮、齿条、支撑架和凸轮导向机构,所述主动齿轮转动设置在机器人主框架上,所述支撑架与机器人主框架相对滑动设置,所述齿条在竖向上导向滑动设置在支撑架上,所述齿条与主动齿轮啮合设置,所述凸轮导向机构设置在主动齿轮上;搬运机器人在立体仓库中能灵活自由行驶,提高仓

一种用于搬运机器人的换向顶升机构.pdf
本发明公开了一种用于搬运机器人的换向顶升机构,包括搬运机器人车体、坡道和巷道;所述坡道和巷道的延伸方向互相垂直;所述搬运机器人车体包括驱动机构、车体主框架和换向体部件;所述车体主框架两侧布置有巷道行驶轮;所述换向体部件对称布置在车体主框架两端内部,所述换向体部件内安装有坡道行驶轮;所述巷道行驶轮与坡道行驶轮的行进方向相互垂直;所述驱动机构驱动换向体部件竖向上下运动,且所述巷道行驶轮和坡道行驶轮分别伴随在巷道和坡道内行进。本发明提供一种用于搬运机器人的换向顶升机构能实现搬运机器人在不同通道内自由行驶,并灵活